目录
3.1 lidar_camera_calib简介
3.2 环境准备
3.3 编译
3.4 运行数据集
(1) 单场景标定
(2) 多场景标定
3.5 使用您自己的传感器设置
3.5.1 采集相机图片和雷达bag数据
3.5.2 使用多场景标定
3.5.3 相机内参获取
3.5.4 运行标定程序
3.5.5 验证结果
源码地址:https://github.com/hku-mars/livox_camera_calib
注意: lidar_camera_calib和livox_camera_lidar_calibration为两个不同的标定程序,两个标定代码都是基于livox的激光雷达,代码重合的较高,应该为同一团队成果, lidar_camera_calib标定的自标定过程较为简单,精度也随之较低。本文的介绍 lidar_camera_calib,同时也借鉴了livox_camera_lidar_calibration的( 投影点云到照片 projectCloud.cpp和点云着色color_lidar_display.cpp代码)
3.1 lidar_camera_calib简介
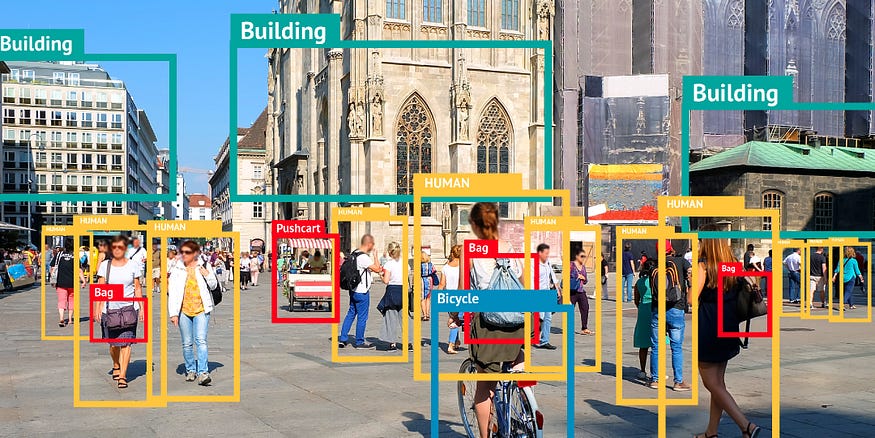
lidar_camera_calib是一个在无目标环境中,用于高分辨率LiDAR(例如Livox)和摄像机之间准确的外部标定工具。我们的算法可以在室内和室外场景中运行,并且只需要场景中的边缘信息。如果场景适合,我们可以实现类似于或甚至超过基于目标的方法的像素级准确度。
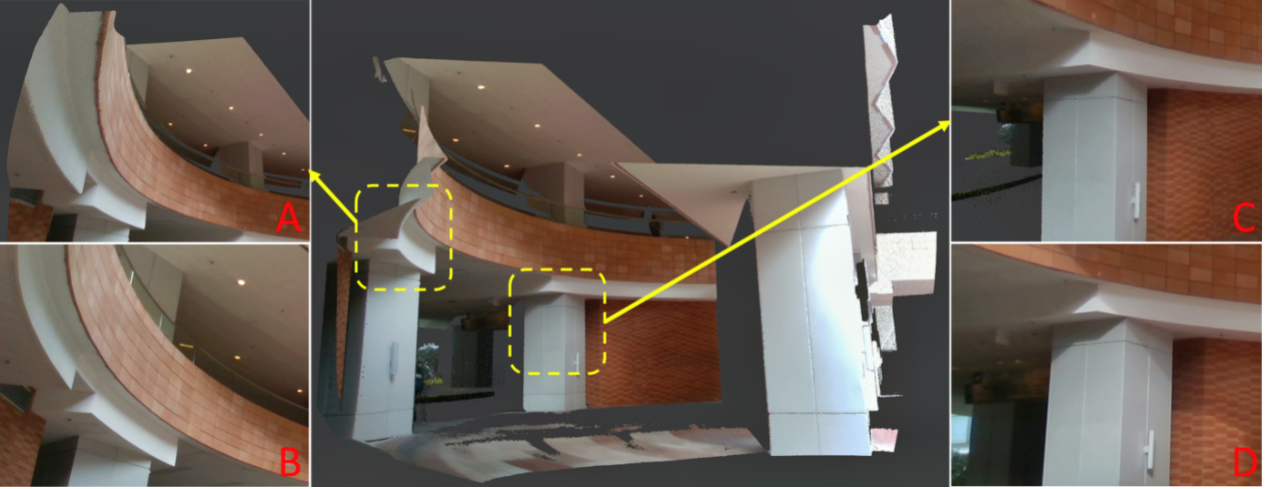
我们使用标定的外部参数给点云上色,并与实际图像进行比较。A和C是点云的局部放大视图。B和D是与A和C中的点云对应的摄像机图像的部分。
lidar_camera_calib支持多场景标定(更准确和稳定) 相关论文 相关论文可以在arxiv上找到: 像素级无目标环境下高分辨率LiDAR和摄像机的外部自标定。
3.2 环境准备
(1) Ubuntu和ROS
需要Ubuntu 64位16.04或18.04。ROS Kinetic或Melodic。ROS的安装及其额外的ROS包
sudo apt-get install ros-XXX-cv-bridge ros-xxx-pcl-conversions(2) Eigen
// 安装
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
// 安装后 头文件安装在/usr/local/include/eigen3/
// 移动头文件
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include备注:在很多程序中 include 时经常使用 #include <Eigen/Dense> 而不是使用 #include <eigen3/Eigen/Dense> 所以要做下处理
(3) Ceres Solver
(4) PCL
3.3 编译
克隆代码库并进行catkin_make
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/livox_camera_calib.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash编译报错1: 编译时会出现如下报错,报错原因是ceres版本太高的原因,将ceres2.1.0改为ceres2.2.0后运行正常
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_multi_calib.cpp:312:14: error: ‘LocalParameterization’ is not a member of ‘ceres’
312 | ceres::LocalParameterization *q_parameterization =
| ^~~~~~~~~~~~~~~~~~~~~
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_multi_calib.cpp:312:37: error: ‘q_parameterization’ was not declared in this scope
312 | ceres::LocalParameterization *q_parameterization =
| ^~~~~~~~~~~~~~~~~~
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_multi_calib.cpp:313:15: error: expected type-specifier
313 | new ceres::EigenQuaternionParameterization();
| ^~~~~
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_calib.cpp: In function ‘int main(int, char**)’:
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_calib.cpp:311:14: error: ‘LocalParameterization’ is not a member of ‘ceres’
311 | ceres::LocalParameterization *q_parameterization =
| ^~~~~~~~~~~~~~~~~~~~~
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_calib.cpp:311:37: error: ‘q_parameterization’ was not declared in this scope
311 | ceres::LocalParameterization *q_parameterization =
| ^~~~~~~~~~~~~~~~~~
/home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/src/lidar_camera_calib.cpp:312:15: error: expected type-specifier
312 | new ceres::EigenQuaternionParameterization();编译报错2:opencv版本冲突,系统自带的opencv4.5.4和ros下的opencv4.2.0冲突。
/usr/bin/ld: warning: libopencv_features2d.so.4.2, needed by /usr/lib/aarch64-linux-gnu/libopencv_calib3d.so.4.2.0, may conflict with libopencv_features2d.so.4.5
/usr/bin/ld: warning: libopencv_imgproc.so.4.5, needed by /usr/lib/aarch64-linux-gnu/libopencv_imgcodecs.so.4.5.4, may conflict with libopencv_imgproc.so.4.2
[ 91%] Built target lidar_camera_calib
/usr/bin/ld: warning: libopencv_features2d.so.4.2, needed by /usr/lib/aarch64-linux-gnu/libopencv_calib3d.so.4.2.0, may conflict with libopencv_features2d.so.4.5
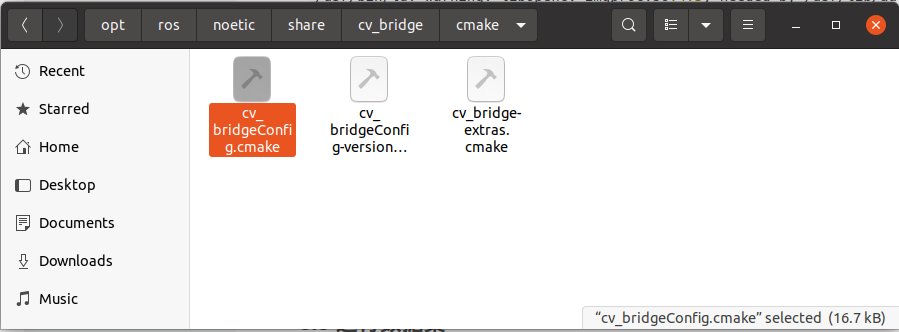
/usr/bin/ld: warning: libopencv_imgproc.so.4.5, needed by /usr/lib/aarch64-linux-gnu/libopencv_imgcodecs.so.4.5.4, may conflict with libopencv_imgproc.so.4.24修改cv_bridge配置:
ros默认安装的opencv路径在/usr/include,/usr/lib,/usr/share三个目录。从opencv官网源码编译安装的,opencv会默认安装到usr/local下对应的三个子目录。
#if(NOT "include;/usr/include/opencv4 " STREQUAL " ")
# set(cv_bridge_INCLUDE_DIRS "")
# set(_include_dirs "include;/usr/include/opencv4")
if(NOT "include;/usr/local/include;/usr/local/include/opencv4" STREQUAL " ")
set(cv_bridge_INCLUDE_DIRS "")
set(_include_dirs "include;/usr/local/include;/usr/local/include/opencv4;/usr/include")
set(libraries "cv_bridge;/usr/lib/aarch64-linux-gnu/libopencv_calib3d.so.4.2.0;/usr/lib/aarch64-linux-gnu/libopencv_dnn.so.4.2.0;........)3.4 运行数据集
官方提供的数据集可以从OneDrive和BaiduNetDisk(百度网盘)下载。
百度网盘:https://pan.baidu.com/s/1oz3unqsmDnFvBExY5fiBJQ?pwd=i964#list/path=%2F
(1) 单场景标定
将我们的pcd和image文件下载到本地路径,并将calib.yaml文件中的文件路径更改为您的数据路径。然后直接运行:
source ./devel/setup.bash
roslaunch livox_camera_calib calib.launch将得到以下结果。
make[2]: *** No rule to make target '/usr/lib/aarch64-linux-gnu/libopencv_aruco.so.4.5.4', needed by '/home/zjlab/perception/Calib/calib_ws/devel/lib/livox_camera_calib/bag_to_pcd'. Stop.
make[1]: *** [CMakeFiles/Makefile2:2054: livox_camera_calib/CMakeFiles/bag_to_pcd.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
make[2]: *** No rule to make target '/usr/lib/aarch64-linux-gnu/libopencv_aruco.so.4.5.4', needed by '/home/zjlab/perception/Calib/calib_ws/devel/lib/livox_camera_calib/lidar_camera_calib'. Stop.
make[1]: *** [CMakeFiles/Makefile2:488: livox_camera_calib/CMakeFiles/lidar_camera_calib.dir/all] Error 2
make[2]: *** No rule to make target '/usr/lib/aarch64-linux-gnu/libopencv_aruco.so.4.5.4', needed by '/home/zjlab/perception/Calib/calib_ws/devel/lib/livox_camera_calib/lidar_camera_multi_calib'. Stop.运行报错1:Can not load image。
[ERROR] [1689831836.845248880]: Can not load image from /home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib-master/data/calib_dataset/single_scene_calibratio/0.png
[lidar_camera_calib-1] process has died [pid 18393, exit code 255, cmd /home/zjlab/perception/Calib/calib_ws/devel/lib/livox_camera_calib/lidar_camera_calib __name:=lidar_camera_calib __log:=/home/zjlab/.ros/log/d53e9cfa-26ac-11ee-b53d-48b02d3db6e3/lidar_camera_calib-1.log].
log file: /home/zjlab/.ros/log/d53e9cfa-26ac-11ee-b53d-48b02d3db6e3/lidar_camera_calib-1*.log查看calib.yaml文件中的文件路径是否更改准确,更改后运行正常.
运行报错2:process has died.系统自带的opencv4.5.4和ros下的opencv4.2.0冲突
[lidar_camera_calib-1] process has died [pid 25608, exit code -11, cmd /home/zjlab/perception/Calib/calib_ws/devel/lib/livox_camera_calib/lidar_camera_calib __name:=lidar_camera_calib __log:=/home/zjlab/.ros/log/d53e9cfa-26ac-11ee-b53d-48b02d3db6e3/lidar_camera_calib-1.log].
log file: /home/zjlab/.ros/log/d53e9cfa-26ac-11ee-b53d-48b02d3db6e3/lidar_camera_calib-1*.log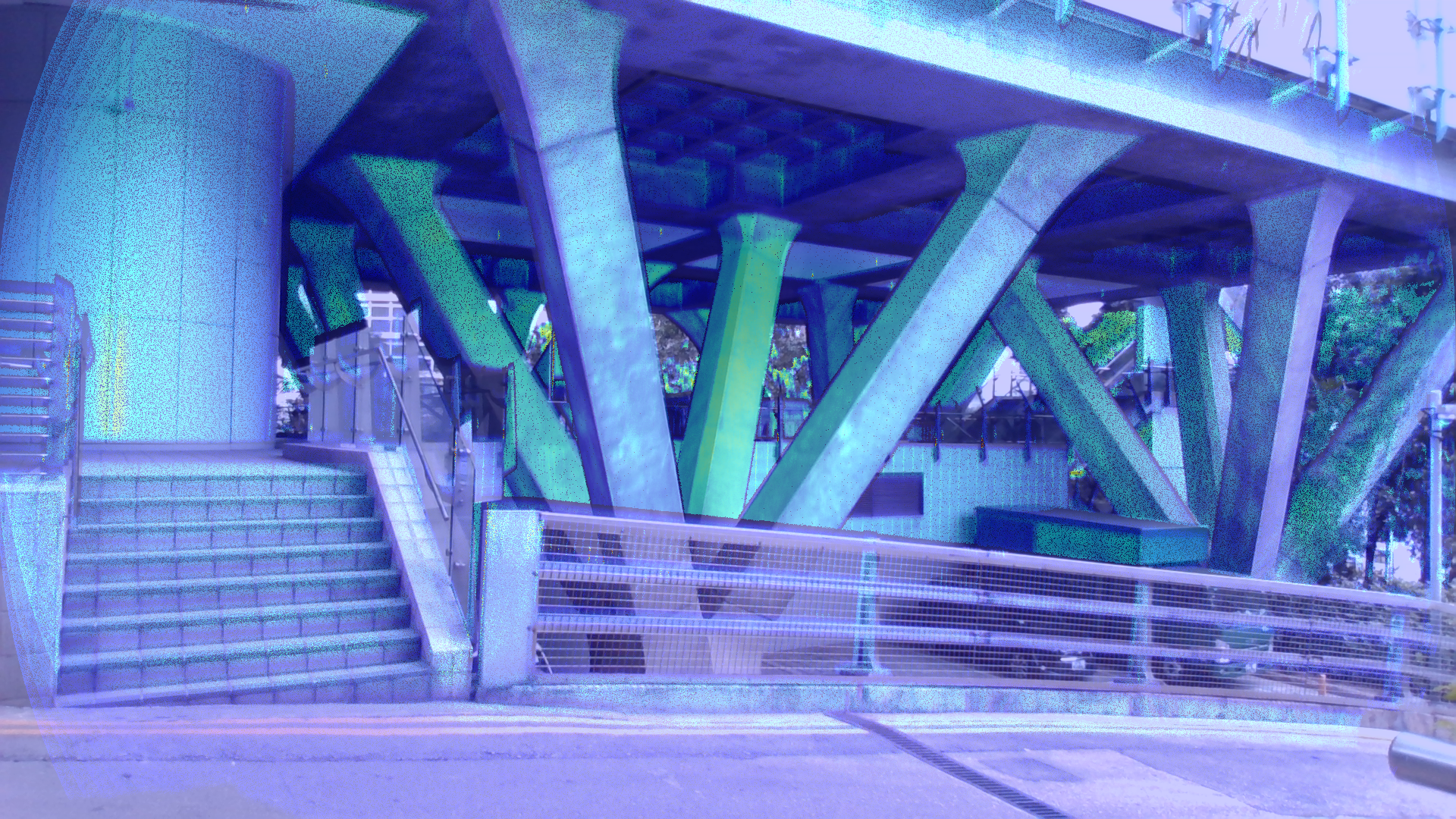
init.png

在指定的yaml指定的文件目录下生成的标定结果如下:
-0.00261333,-0.999901,-0.0138569,0.014096
-0.00334576,0.0138656,-0.999898,0.0574687
0.999991,-0.0025667,-0.00338166,-0.0518364
0,0,0,1(2) 多场景标定
将我们的pcd和image文件下载到本地路径,并将multi_calib.yaml文件中的文件路径更改为您的数据路径。然后直接运行:
roslaunch livox_camera_calib multi_calib.launch使用初始外部参数得到的投影图像。(传感器套件:Livox Horizon + MVS相机)
多场景标定的示例。

residual可视化结果
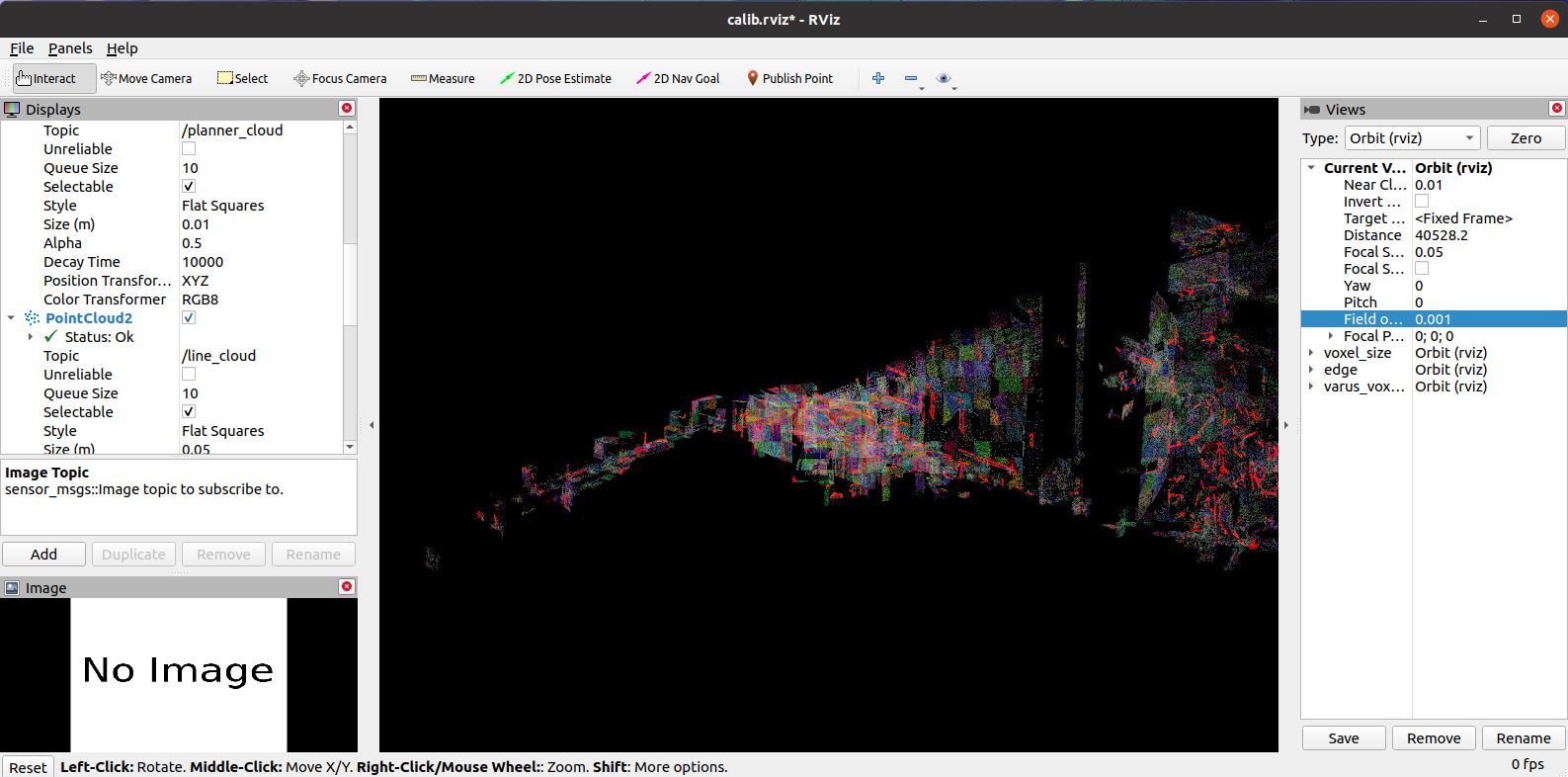
rviz可视化结果
通过初始外参获得的投影图像。(传感器套件:Livox Horizon + MVS相机)

多场景校准的一个例子。通过初始外参获得的投影图像。
粗略校准用于处理不好的外参。

粗略校准后获得的外参获得的投影图像。
最终优化后,我们最终获得了一个精确的外参。
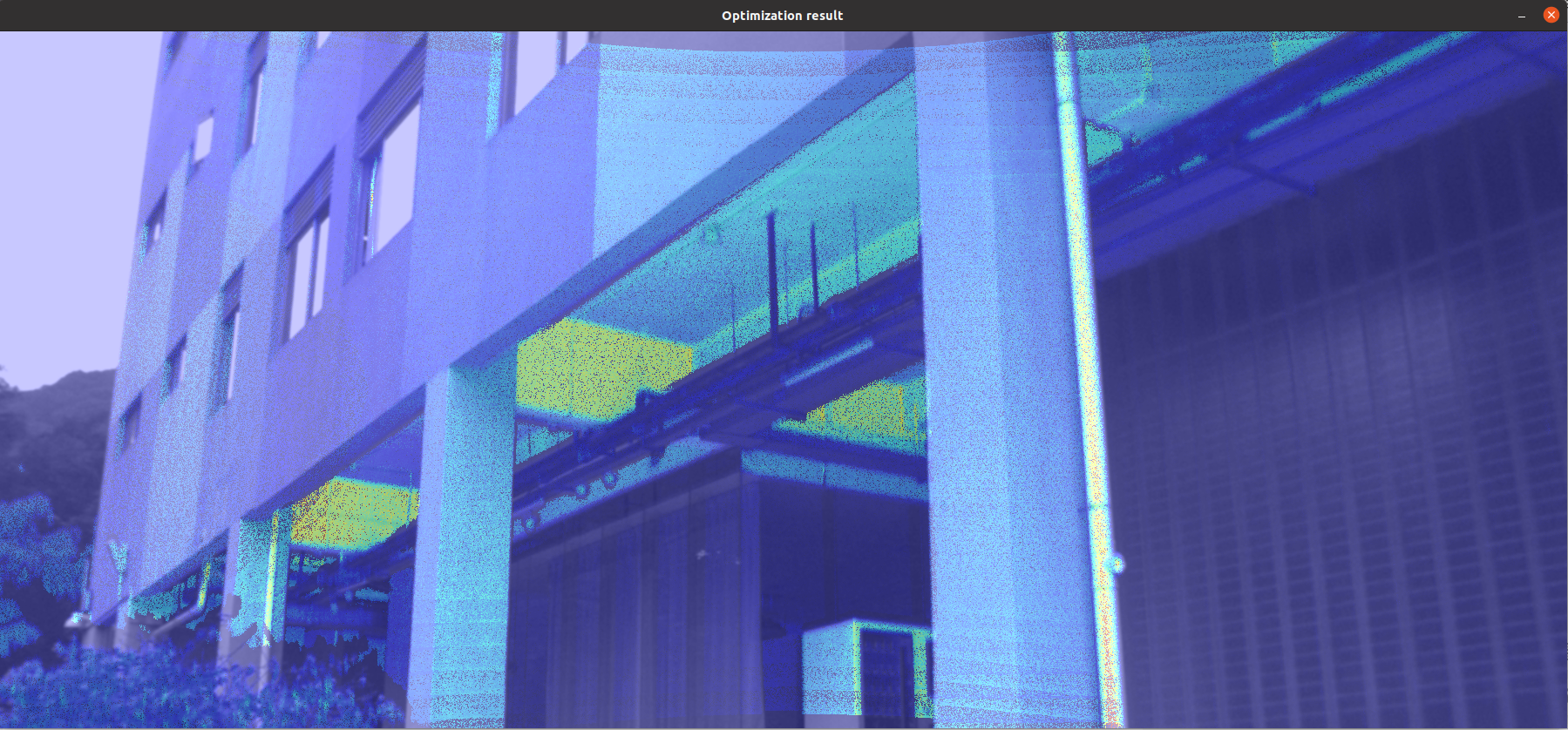
精确校准后获得的外参获得的投影图像。
在指定的yaml指定的文件目录下生成的标定结果如下:
0.00943777,-0.999902,-0.0103278,-0.0507875
-0.0434641,0.00990826,-0.999006,0.0851625
0.99901,0.00987727,-0.0433664,-0.0231513
0,0,0,13.5 使用自己的传感器数据标定
3.5.1 采集相机图片和雷达bag数据
(1) 通过按键‘T’采集相机图片,通过下面的脚本实现,脚本为ZED相机自带,在/usr/local/zed/samples/tutorials/tutorial2_image_capture目录下修改。
#include </usr/local/zed/include/sl/Camera.hpp>
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace sl;
int main(int argc, char **argv) {
// Create a ZED camera object
Camera zed;
// Set configuration parameters
InitParameters init_parameters;
init_parameters.camera_resolution = RESOLUTION::HD1080; // Use HD1080 video mode
init_parameters.camera_fps = 30; // Set fps at 30
// Open the camera
auto returned_state = zed.open(init_parameters);
if (returned_state != ERROR_CODE::SUCCESS) {
cout << "Error " << returned_state << ", exit program." << endl;
return EXIT_FAILURE;
}
// Capture 50 frames and stop
// int i = 0;
int i = 0;
sl::Mat image;
cout << "Please 'T' or 't' capture picture, 'E' or 'e' Exit!" << endl;
while (true){
// Grab an image
returned_state = zed.grab();
// A new image is available if grab() returns ERROR_CODE::SUCCESS
if (returned_state == ERROR_CODE::SUCCESS) {
char key;
cin >> key;
if(key == 'E' || key == 'e'){
break;
}
if(key == 'T' || key == 't'){
// Get the left image
cout << "Capture picture" << to_string(i) << endl;
zed.retrieveImage(image, VIEW::LEFT);
string savePath = "../data/image/" + to_string(i) + ".bmp" ;
image.write(savePath.c_str());
// Display the image resolution and its acquisition timestamp
cout<<"Image resolution: "<< image.getWidth()<<"x"<<image.getHeight() <<" || Image timestamp: "<<image.timestamp.data_ns<< endl << endl;
i++;
}
}
}
// while(i < 10){
// returned_state
// }
// Close the camera
zed.close();
return EXIT_SUCCESS;(2) 采集雷达bag数据,要通过roslaunch livox_ros_driver livox_lidar_msg.launch命令启动雷达,bag的类型是livox_ros_driver2/CustomMsg,不然bag的格式为sensor_msgs/PointCloud2,不方便后续程序的处理。
roslaunch livox_ros_driver livox_lidar_msg.launch # 启动雷达
# 在根目录下逐级创建用于保存 bag 文件的文件夹
mkdir -p src/livox_camera_lidar_calibration/data/lidar
rosbag record -O src/livox_camera_lidar_calibration/data/lidar/0.bag /livox/lidar # 录制点云,输出到指定文件夹下,便于后续操作,文件名从序号 0 开始标3.5.2 使用多场景标定
在multi_calib.yaml中更改参数,将图像文件和pcd文件从0到(数据总数-1)进行命名。
[ INFO] [1690958506.262467995]: Loading the rosbag /home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib/mydata/bag/0.bag
[ERROR] [1690958506.437747485]: LOADING BAG FAILED: Bag unindexed
[bag_to_pcd-2] process has died [pid 6316, exit code 255, cmd /home/zjlab/perception/Calib/calib_ws/devel/lib/livox_camera_calib/bag_to_pcd __name:=bag_to_pcd __log:=/home/zjlab/.ros/log/a4eaa69a-30ff-11ee-99c8-48b02d3db6e3/bag_to_pcd-2.log].
log file: /home/zjlab/.ros/log/a4eaa69a-30ff-11ee-99c8-48b02d3db6e3/bag_to_pcd-2*.log报错:错具体信息为:
rosbag.bag.ROSBagUnindexedException: Unindexed bag问题解决:
遇到这个问题,我们需要去看一下bag,使用命令:
rosbag info 0.bag此时会报错:
ERROR bag unindexed: 0.bag. Run rosbag reindex.依次执行记录的bag:
rosbag reindex 0.bag等待执行完毕,我们再输入,如果能正常输出,则代表可以正常读入bag了
zjlab@zjlab-zjrobot:~/perception/Calib/calib_ws/src/livox_camera_calib/mydata/bag$ rosbag info 0.bag
ERROR bag unindexed: 0.bag. Run rosbag reindex.
zjlab@zjlab-zjrobot:~/perception/Calib/calib_ws/src/livox_camera_calib/mydata/bag$ Run rosbag reindex
bash: Run: command not found
zjlab@zjlab-zjrobot:~/perception/Calib/calib_ws/src/livox_camera_calib/mydata/bag$ rosbag reindex 0.bag
0.bag 100% 44.1 MB 00:00
zjlab@zjlab-zjrobot:~/perception/Calib/calib_ws/src/livox_camera_calib/mydata/bag$ rosbag info 0.bag
path: 0.bag
version: 2.0
duration: 10.5s
start: Jul 28 2023 16:37:17.00 (1690533438.00)
end: Jul 28 2023 16:37:28.50 (1690533448.50)
size: 43.7 MB
messages: 106
compression: none [53/53 chunks]
types: sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
topics: /livox/lidar 106 msgs : sensor_msgs/PointCloud2
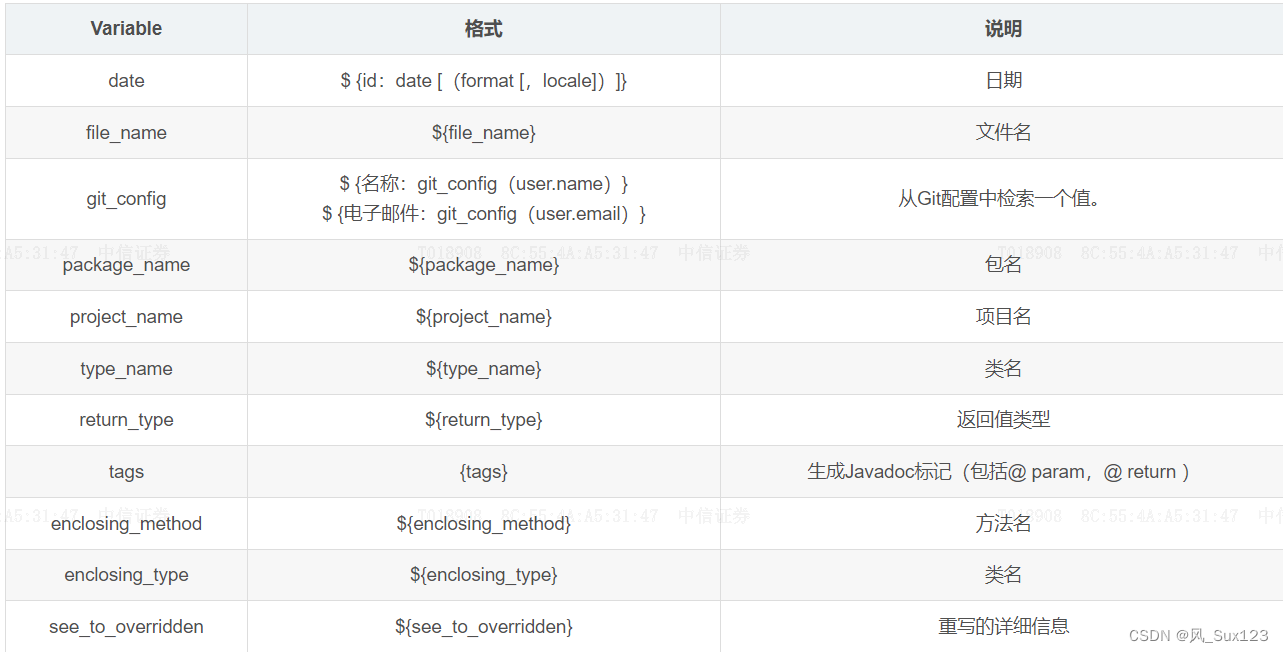
3.5.3 相机内参获取
内参矩阵的格式如下图所示,一般在(0,0);(0,2);(1,1);(1,2)四个位置有对应的值。

在/usr/local/zed/settings目录文件下获取相机内参
[LEFT_CAM_2K]
fx=1055.98
fy=1054.75
cx=1109.22
cy=618.272
k1=-0.0436089
k2=0.0133655
p1=-0.000636837
p2=0.000189454
k3=-0.00610127
报错:相机内参和外参要满足格式要求,不然会报如下的错误。
process[projectCloud-1]: started with pid [25817]
Get the parameters from the launch file
[ INFO] [1691026996.688365859]: Start to load the rosbag /home/zjlab/perception/Calib/calib_ws/src/livox_camera_calib/mydata/bag/0.bag
Can not convert a string to double
[projectCloud-1] process has finished cleanly
解决办法:修改内外参文件,按照要求排列,数字之间要有空格


报错:Failed to load module "canberra-gtk-module"
Gtk-Message: 11:34:35.337: Failed to load module "canberra-gtk-module"
[projectCloud-1] process has finished cleanly
log file: /home/zjlab/.ros/log/83ec06a2-311b-11ee-a1d3-024273a4022a/projectCloud-1*.log
all processes on machine have died, roslaunch will exit解决办法:重新安装一下吧。
sudo apt-get install libcanberra-gtk-module3.5.4 运行标定程序
运行后外参结果将会保存在指定目录下
roslaunch livox_camera_calib multi_calib.launch3.5.5 验证结果
投影点云到照片和点云着色可以参考livox_camera_lidar_calibration,只需修改launch文件下的路径即可验证。
(1) 投影点云到照片
roslaunch livox_camera_calib projectCloud.launch(2) 点云着色:
roslaunch livox_camera_calib colorLidar.launch




![数字孪生工厂分享交流方案[53页PPT]](https://img-blog.csdnimg.cn/img_convert/652182aca6d1bf06b83ce7b1ab212fb6.jpeg)