目录
一、蜂鸣器简介
二、硬件原理分析
三、蜂鸣器驱动原理
四、开发环境
五、修改设备树文件
1、添加 pinctrl 节点
2、添加 BEEP 设备节点
3、检查 PIN 是否被其他外设使用
六、蜂鸣器驱动程序编写
七、测试程序编写
八、运行验证
在 I.MX6U-ALPHA 开发板上有一个有源蜂鸣器,通过 IO 输出高低电平即可控制蜂鸣器的开关,本质上也属于 GPIO 的输出控制。
一、蜂鸣器简介
常用的蜂鸣器有两种:有源蜂鸣器和无源蜂鸣器。
注:这里的有“源”不是电源,而是震荡源。
有源蜂鸣器内部带有震荡源,所以有源蜂鸣器只要通电就会叫。
无源蜂鸣器内部不带震荡源,直接用直流电是驱动不起来的,需要 2K-5K 的方波去驱动。
I.MX6U-ALPHA 开发板使用的是有源蜂鸣器,因此只要给其供电就会工作。
有源蜂鸣器只要通电就会叫,所以我们可以做一个供电电路, 这个供电电路可以由一个 IO来控制其通断,一般使用三极管来搭建这个电路。为什么我们不能像控制 LED 灯一样,直接将GPIO 接到蜂鸣器的负极,通过 IO 输出高低来控制蜂鸣器的通断。因为蜂鸣器工作的电流比LED 灯要大,直接将蜂鸣器接到 I.MX6U 的 GPIO 上有可能会烧毁 IO,所以我们需要通过一个三极管来间接的控制蜂鸣器的通断,相当于加了一层隔离。本章我们就驱动 I.MX6U-ALPHA 开发板上的有源蜂鸣器,使其周期性的“滴、滴、滴…..”鸣叫。
二、硬件原理分析
蜂鸣器的硬件原理图如下图 所示:
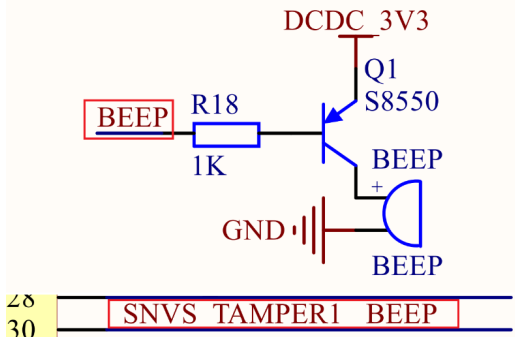
上图中通过一个 PNP 型的三极管 8550 来驱动蜂鸣器,通过 SNVS_TAMPER1 这个 IO来控制三极管 Q1 的导通,当 SNVS_TAMPER1 输出低电平的时候 Q1 导通,相当于蜂鸣器的正极连接到 DCDC_3V3,蜂鸣器形成一个通路,因此蜂鸣器会鸣叫。同理,当 SNVS_TAMPER1输出高电平的时候 Q1 不导通,那么蜂鸣器就没有形成一个通路,因此蜂鸣器也就不会鸣叫。
三、蜂鸣器驱动原理
I.MX6U-ALPHA 开发板上的蜂鸣器通过SNVS_TAMPER1 引脚来控制,本节我们来看一下如果在 Linux 下编写蜂鸣器驱动需要做哪些工作:
①、在设备树中添加 SNVS_TAMPER1 引脚的 pinctrl 信息。
②、在设备树中创建蜂鸣器节点,在蜂鸣器节点中加入 GPIO 信息。
③、编写驱动程序和测试 APP,和前面一章的 LED 驱动程序和测试 APP 基本一样。
接下来我们就根据上面这三步来编写蜂鸣器 Linux 驱动。
四、开发环境
CPU:IMX6ULL
内核版本:Linux-5.19
五、修改设备树文件
1、添加 pinctrl 节点
I.MX6U-ALPHA开发板上的 BEEP使用了 SNVS_TAMPER1这个 PIN,打开 imx6ul-14x14-evk.dtsi,在 iomuxc 节点的 imx6ul-evk 子节点下创建一个名为“pinctrl_beep”的子节点,节点内容如下所示:
pinctrl_beep: beepgrp {
fsl,pins = <
MX6UL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x10B0 /* beep */
>;
};
第 3 行 , 将 SNVS_TAMPER1 这 个 PIN 复 用 为 GPIO5_IO01 , 宏MX6ULL_PAD_SNVS_TAMPER1__GPIO5_IO01 定义在 arch/arm/boot/dts/imx6ul-pinfunc.h文件中。
2、添加 BEEP 设备节点
在根节点“/”下创建 BEEP 节点,节点名为“beep”,节点内容如下:
beep {
#address-cells = <1>;
#size-cells = <1>;
compatible = "imx6ull-beep";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_beep>;
beep-gpio = <&gpio5 1 GPIO_ACTIVE_HIGH>;
status = "okay";
};
第 6 行, pinctrl-0 属性设置蜂鸣器所使用的 PIN 对应的 pinctrl 节点。
第 7 行, beep-gpio 属性指定了蜂鸣器所使用的 GPIO。
3、检查 PIN 是否被其他外设使用
在本章实验中蜂鸣器使用的 PIN 为 SNVS_TAMPER1,因此先检查 PIN 为 SNVS_TAMPER1这个 PIN 有没有被其他的 pinctrl 节点使用,如果有使用的话就要屏蔽掉,然后再检查GPIO5_IO01 这个 GPIO 有没有被其他外设使用,如果有的话也要屏蔽掉。设备树编写完成以后使用“make dtbs”命令重新编译设备树,然后使用新编译出来的imx6ull-alientek-emmc.dtb 文件启动 Linux 系统。启动成功以后进入“/proc/device-tree”目录中查看“beep”节点是否存在,如果存在的话就说明设备树基本修改成功(具体还要驱动验证),结果如下图所示:
/ # ls /proc/device-tree/
#address-cells clock-osc regulator-can-3v3
#size-cells compatible regulator-peri-3v3
aliases cpus regulator-sd1-vmmc
backlight-display dts_led soc
beep memory@80000000 sound-wm8960
chosen model spi4
clock-cli name timer
clock-di0 panel
clock-di1 pmu
/ #
六、蜂鸣器驱动程序编写
设备树准备好以后就可以编写驱动程序了,在 beep.c 里面输入如下内容:
/************************************************************
* Copyright © toto Co., Ltd. 1998-2029. All rights reserved.
* Description:
* Version: 1.0
* Autor: toto
* Date: Do not edit
* LastEditors: Seven
* LastEditTime: Do not edit
************************************************************/
#include <linux/fs.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/io.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/gpio.h>
#include <linux/of_gpio.h>
#define BEEP_CNT 1 /* 设备号数量 */
#define BEEP_NAME "beep" /* 设备名字 */
#define BEEP_ON 1 /* 开打 */
#define BEEP_OFF 0 /* 关灯 */
/* beep 设备结构体 */
struct beep_dev
{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int beep_gpio; /* beep 所使用的GPIO编号*/
};
struct beep_dev beep;
/*
* @Brief beep打开/关闭
* @Call Internal or External
* @Param state: 1-打开 0-关闭
* @Note NOne
* @RetVal 无
*/
void beep_switch(u8 state)
{
if(state == BEEP_ON)
{
gpio_set_value(beep.beep_gpio, 0);
}
else if(state == BEEP_OFF)
{
gpio_set_value(beep.beep_gpio, 1);
}
else
{
printk("%s state:%d invalid\n", __func__, state);
}
}
/*
* @Brief 打开设备
* @Call Internal or External
* @Param inode:
* @Param filp:设备文件
* @Note NOne
* @RetVal 0:成功 其他值:失败
*/
static int beep_open(struct inode *inode, struct file *filp)
{
/* 设置私有数据 */
filp->private_data = &beep;
return 0;
}
/*
* @Brief 从设备读数据
* @Call Internal or External
* @Param filp:要打开的设备文件描述符
* @Param buf:返回给用户空间的数据地址
* @Param cnt:要读取的数据长度
* @Param offt:相对于文件首地址的偏移
* @Note NOne
* @RetVal 读取的字节数,若为负值,表示读失败
*/
static ssize_t beep_read(struct file *filp, char __user *buf,
size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @Brief 写数据到设备
* @Call Internal or External
* @Param filp:要打开的设备文件描述符
* @Param buf:要写入设备的数据地址
* @Param cnt:要写入的数据长度
* @Param offt:相对于文件首地址的偏移
* @Note NOne
* @RetVal 写入的字节数,若为负值,表示写失败
*/
static ssize_t beep_write(struct file *filp, const char __user *buf,
size_t cnt, loff_t *offt)
{
int retval;
unsigned char databuf[1];
unsigned char beepstat;
retval = copy_from_user(databuf, buf, cnt);
if(retval < 0)
{
printk("%s copy_from_user failed\n", __func__);
return -EFAULT;
}
beepstat = databuf[0];
if(beepstat != BEEP_ON && beepstat != BEEP_OFF)
{
printk("%s beepstat:%d invalid\n", __func__, beepstat);
return -1;
}
/*打开、关闭LED*/
beep_switch(beepstat);
return 0;
}
/*
* @Brief 关闭/释放设备
* @Call Internal or External
* @Param inode:
* @Param filp:要关闭的设备文件描述符
* @Note NOne
* @RetVal NOne
*/
static int beep_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* 设备操作函数 */
static struct file_operations beep_fops = {
.owner = THIS_MODULE,
.open = beep_open,
.read = beep_read,
.write = beep_write,
.release = beep_release,
};
/*
* @Brief 驱动入口函数
* @Call Internal or External
* @Param None
* @Note NOne
* @RetVal NOne
*/
static int __init beep_init(void)
{
int ret;
/* 设置beep 所使用的GPIO*/
/* 1.获取设备节点:beep */
beep.nd = of_find_node_by_path("/beep");
if(beep.nd == NULL)
{
printk("beep node can not found\n");
return -EINVAL;
}
/* 2.获取 设备树中的 gpio 属性,得到 beep 所使用的 gpio 编号 */
beep.beep_gpio = of_get_named_gpio(beep.nd, "beep-gpio", 0);
if(beep.beep_gpio < 0)
{
printk("can't get beep-gpio\n");
return -EINVAL;
}
/* 3.设置 GPIO5_IO01 为输出,并且输出到电平,默认关闭 beep */
ret = gpio_direction_output(beep.beep_gpio, 1);
if(ret < 0)
{
printk("can't set gpio\n");
return -EINVAL;
}
/* 注册字符设备驱动 */
/* 创建设备号 */
if(beep.major) /* 定义了设备号 */
{
beep.devid = MKDEV(beep.major, 0);
register_chrdev_region(beep.devid, BEEP_CNT, BEEP_NAME);
}
else
{
/* 申请设备号 */
alloc_chrdev_region(&beep.devid, 0, BEEP_CNT, BEEP_NAME);
/* 获取主设备号 */
beep.major = MAJOR(beep.devid);
/* 获取次设备号 */
beep.minor = MINOR(beep.devid);
}
printk("%s new_chrdev major:%d minor:%d\n", __func__,
beep.major, beep.minor);
/* 初始化cdev */
beep.cdev.owner = THIS_MODULE;
cdev_init(&beep.cdev, &beep_fops);
/* 添加一个cdev */
cdev_add(&beep.cdev, beep.devid, BEEP_CNT);
/* 创建类 */
beep.class = class_create(THIS_MODULE, BEEP_NAME);
if(IS_ERR(beep.class))
{
return PTR_ERR(beep.class);
}
/* 创建设备 */
beep.device = device_create(beep.class, NULL,
beep.devid, NULL, BEEP_NAME);
if(IS_ERR(beep.device))
{
return PTR_ERR(beep.device);
}
return 0;
}
/*
* @Brief 驱动出口函数
* @Call Internal or External
* @Param None
* @Note NOne
* @RetVal NOne
*/
static void __exit beep_exit(void)
{
/* 注销字符设备 */
/* 删除cdev */
cdev_del(&beep.cdev);
/* 释放分配的设备号 */
unregister_chrdev_region(beep.devid, BEEP_CNT);
device_destroy(beep.class, beep.devid);
class_destroy(beep.class);
}
module_init(beep_init);
module_exit(beep_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("toto");
七、测试程序编写
beep_app.c测试程序具体代码如下:
/********************************************
*Description:
*Version: 1.0
*Autor: toto
*Date: Do not edit
*LastEditors: Seven
*LastEditTime: Do not edit
********************************************/
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <string.h>
#define BEEPON 1
#define BEEPOFF 0
/*
* @Brief main 主程序
* @Call Internal or External
* @Param argc:
* @Param argv:
* @Note NOne
* @RetVal 0-成功;其他-失败
*/
int main(int argc, char *argv[])
{
int fd, retval;
char *filename;
unsigned char databuf[1];
if(argc != 3)
{
printf("argc != 3\n");
return -1;
}
filename = argv[1];
/*打开驱动文件*/
fd = open(filename, O_RDWR);
if(fd < 0)
{
printf("open filename:%d failed\n", filename);
return -1;
}
/* 要执行的操作:打开或关闭 */
databuf[0] = atoi(argv[2]);
retval = write(fd, databuf, sizeof(databuf));
if(retval < 0)
{
printf("write file:%s failed\n", filename);
}
/*关闭文件*/
close(fd);
return 0;
}
八、运行验证
开发板上电,将 beep.ko 和 beep_app 这两个文件拷贝到 /lib/modules/5.19.0-g794a2f7be62d-dirty/ 目录中,输入如下命令加载 beep.ko 驱动模块:
/ # insmod /lib/modules/5.19.0-g794a2f7be62d-dirty/beep.ko
[ 862.280306] beep_driver: loading out-of-tree module taints kernel.
[ 862.290970] beep_init new_chrdev major:242 minor:0
/ #
驱动加载成功以后就可以使用 beep_app 软件来测试驱动是否工作正常,输入如下命令打开beep蜂鸣器:
# ./beep_app /dev/beep 1 //打开 beep蜂鸣器
输入上述命令以后观察 I.MX6U-ALPHA 开发板上的 beep蜂鸣器是否鸣叫,如果鸣叫的话说明驱动工作正常。在输入如下命令关闭 beep蜂鸣器:
# ./beep_app /dev/beep 0 //关闭 beep蜂鸣器
输入上述命令以后观察 I.MX6U-ALPHA 开发板上的红色 beep蜂鸣器是否关闭。如果要卸载驱动的话输入如下命令即可:
rmmod beep.ko
关于更多嵌入式C语言、FreeRTOS、RT-Thread、Linux应用编程、linux驱动等相关知识,关注公众号【嵌入式Linux知识共享】,后续精彩内容及时收看了解。