一、介绍
This document demonstrates using the Iterative Closest Point algorithm in your code which can determine if one PointCloud is just a rigid transformation of another by minimizing the distances between the points of two pointclouds and rigidly transforming them.
使用ICP算法实现点云的配准,刚性变换4*4矩阵。
How to use the Normal Distributions Transform (NDT) algorithm to determine a rigid transformation between two large point clouds, both over 100,000 points.
使用NDT算法实现大数据的点云配准,刚性变换4*4矩阵。
二、代码
1、ICP算法
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/icp.h>
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in(new pcl::PointCloud<pcl::PointXYZ>(5, 1));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out(new pcl::PointCloud<pcl::PointXYZ>);
for (auto& point : *cloud_in)
{
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
}
std::cout << "cloud_in num = " << cloud_in->size() << " ################## " << std::endl;
for (auto& point : *cloud_in)
std::cout << point << std::endl;
*cloud_out = *cloud_in;
for (auto& point : *cloud_out)
point.x += 0.7f;
std::cout << "cloud_out num = " << cloud_out->size() << " ################## " << std::endl;
for (auto& point : *cloud_out)
std::cout << point << std::endl;
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(cloud_in);
icp.setInputTarget(cloud_out);
pcl::PointCloud<pcl::PointXYZ> Final;
icp.align(Final);
std::cout << "Final num = " << Final.size() << " ################## " << std::endl;
for (auto& point : Final)
std::cout << point << std::endl;
std::cout << "has converged:" << icp.hasConverged() << " score: " << icp.getFitnessScore() << std::endl;
std::cout << icp.getFinalTransformation() << std::endl;
return (0);
}2、NDT算法
数据链接:链接:https://pan.baidu.com/s/1jR7k5iI-acVyyehKcYbetA?pwd=mr16
提取码:mr16
#include <iostream>
#include <thread>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/ndt.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std::chrono_literals;
using namespace std;
int main()
{
// Loading first scan of room.
pcl::PointCloud<pcl::PointXYZ>::Ptr target_cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("room_scan1.pcd", *target_cloud) == -1)
{
PCL_ERROR("Couldn't read file room_scan1.pcd \n");
return (-1);
}
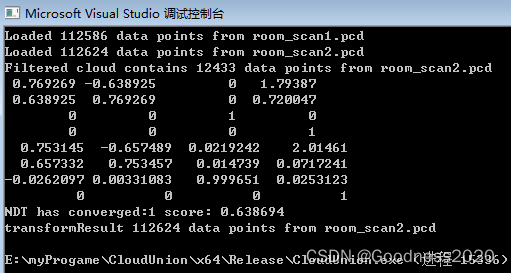
cout << "Loaded " << target_cloud->size() << " data points from room_scan1.pcd" << endl;
// Loading second scan of room from new perspective.
pcl::PointCloud<pcl::PointXYZ>::Ptr input_cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("room_scan2.pcd", *input_cloud) == -1)
{
PCL_ERROR("Couldn't read file room_scan2.pcd \n");
return (-1);
}
cout << "Loaded " << input_cloud->size() << " data points from room_scan2.pcd" << endl;
// Filtering input scan to roughly 10% of original size to increase speed of registration.
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> approximate_voxel_filter;
approximate_voxel_filter.setLeafSize(0.2, 0.2, 0.2);
approximate_voxel_filter.setInputCloud(input_cloud);
approximate_voxel_filter.filter(*filtered_cloud);
cout << "Filtered cloud contains " << filtered_cloud->size() << " data points from room_scan2.pcd" << endl;
// Initializing Normal Distributions Transform (NDT).
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
// Setting scale dependent NDT parameters
// Setting minimum transformation difference for termination condition.
ndt.setTransformationEpsilon(0.01);
// Setting maximum step size for More-Thuente line search.
ndt.setStepSize(0.1);
// Setting Resolution of NDT grid structure (VoxelGridCovariance).
ndt.setResolution(1.0);
// Setting max number of registration iterations.
ndt.setMaximumIterations(35);
// Setting point cloud to be aligned.
ndt.setInputSource(filtered_cloud);
// Setting point cloud to be aligned to.
ndt.setInputTarget(target_cloud);
// Set initial alignment estimate found using robot odometry.
Eigen::AngleAxisf init_rotation(0.6931, Eigen::Vector3f::UnitZ());
Eigen::Translation3f init_translation(1.79387, 0.720047, 0);
Eigen::Matrix4f init_guess = (init_translation * init_rotation).matrix();
cout << init_guess << endl;
// Calculating required rigid transform to align the input cloud to the target cloud.
pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud(new pcl::PointCloud<pcl::PointXYZ>);
ndt.align(*output_cloud, init_guess);
cout << ndt.getFinalTransformation() << endl;
cout << "NDT has converged:" << ndt.hasConverged() << " score: " << ndt.getFitnessScore() << endl;
// Transforming unfiltered input cloud using found transform.
pcl::transformPointCloud(*input_cloud, *output_cloud, ndt.getFinalTransformation());
cout << "transformResult " << output_cloud->size() << " data points from room_scan2.pcd" << endl;
// Saving transformed input cloud.
pcl::io::savePCDFileASCII("room_scan2_transformed.pcd", *output_cloud);
// Initializing point cloud visualizer
pcl::visualization::PCLVisualizer::Ptr
viewer_final(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer_final->setBackgroundColor(0, 0, 0);
// Coloring and visualizing target cloud (red).
pcl::visualization::PointCloudColorHandlerCustom < pcl::PointXYZ>
target_color(target_cloud, 255, 0, 0);
viewer_final->addPointCloud<pcl::PointXYZ>(target_cloud, target_color, "target cloud");
viewer_final->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "target cloud");
// Coloring and visualizing transformed input cloud (green).
pcl::visualization::PointCloudColorHandlerCustom < pcl::PointXYZ>
output_color(output_cloud, 0, 255, 0);
viewer_final->addPointCloud<pcl::PointXYZ>(output_cloud, output_color, "output cloud");
viewer_final->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "output cloud");
// Starting visualizer
viewer_final->addCoordinateSystem(1.0, "global");
viewer_final->initCameraParameters();
// Wait until visualizer window is closed.
while (!viewer_final->wasStopped())
{
viewer_final->spinOnce(100);
this_thread::sleep_for(100ms);
}
return (0);
}
三、结论
1、ICP

参考:How to use iterative closest point — Point Cloud Library 0.0 documentation
2、NDT

参考:How to use Normal Distributions Transform — Point Cloud Library 0.0 documentation







![[mongo]性能机制,分析工具](https://github.com/tutengdihuang/image/assets/31843331/23be66c1-5a09-4580-b9e3-94633e7065b7)