提示:
双目密集匹配及SGM算法
- 前言
- 一、双目密集匹配
- 1、双目密集匹配概述
- 2.、双目密集匹配四大步骤
- 代价计算(per-pixel-cost):
- 释义:
- 代价聚集(cost-aggregation):
- 释义:
- 分类:
- 窗口确定:
- 窗口内各像素的加权计算方法:
- 视差计算:
- 局部算法:
- 全局算法:
- 半全局算法:
- 视差优化:
- 3、视差计算--局部,全局,半全局
- 4、视差优化
- 二、SGM算法详解
- 1.
- 总结
前言
提示:
因为要用到双目密集匹配,因此记录了此文
一、双目密集匹配
1、双目密集匹配概述
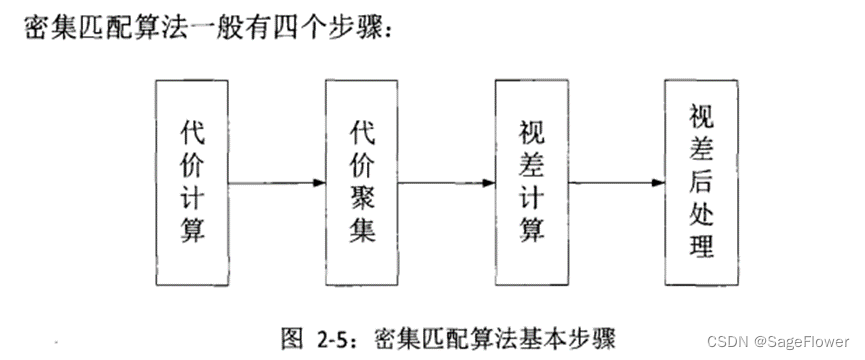
2.、双目密集匹配四大步骤
密集匹配算法一般分为4个步骤:代价计算->代价聚集->视差计算->视差后处理
代价计算(per-pixel-cost):
释义:
代价计算是指在给定的视差范围内,计算出每个像素在不同视差值下,对应的代价值。
相似度越高,代价值越小。
代价聚集(cost-aggregation):
释义:
代价聚集(或者说代价累积)是将初始视差空间中的匹配代价在一定邻域范围内进行求和或加权操作,计算出新的匹配代价。
计算方式本质为对代价计算获取的初始匹配代价图进行卷积运算,因此代价聚集可以理解为基于窗口或不规则区域的加权平均。
研究发现,直接在初始代价值上使用WTA(winner-take-all),往往会出现很多错误结果,在聚集后的代价上使用WTA策略,会有显著的效果提升。
常用算法有: ASW(adaptive support weight ),SASW(segment-based adaptive support weight),BF(bilateral filtering),GF(guided filtering),NLC(non-local cost aggregation ),ST(segment tree)
分类:
代价聚集可解释为基于窗口或不规则区域的加权平均,因此,代价聚集关注两个问题:窗口确定和窗口内各像素的加权计算方法。
窗口确定:
窗口分为:固定的矩形窗口、自适应的不规则窗口。
窗口内各像素的加权计算方法:
加权方法分为:由参数控制的固定权值,根据影像灰度值计算的权值。
视差计算:
密集匹配问题最后都会转化为能量函数优化问题,能量函数用来度量一幅视差图D的质量。
视差计算分为局部算法,全局算法,半全局算法。
局部算法:
局部算法通常使用WTA(winner-take-all)策略,即选择最小代价对应的视差作为最优结果。
全局算法:
全局算法是对视差影像空间在一定邻域范围内进行能量传递,从而计算出累积后的代价。其通过建立全局能量函数,将最优视差估计转换为能量最小化问题。
全局能量函数通式:全局能量函数由数据项和平滑项两部分构成。
(一种区分局部算法和全局算法的方式:仅包含数据项的匹配算法是局部方法,融合平滑约束的匹配方法是全局方法。)

常用的全局优化方法包括: BP算法,MRF算法,Graphcut算法,SGM算法。
半全局算法:
视差优化:
经过上述步骤获取的视差图通常会存在一些噪声,误匹配,漏匹配等情况,其次由于大部分立体匹配算法获取的视差都是针对整像素的离散空间中得到,仍需进行拟合,以获取亚像素级的精度。
常用的视差优化操作包括: 无效区域插值,亚像素级精化, LRC(left-to-right-cross-checking),中值滤波(MF,median filter),加权中值滤波(WMF, weighted median filter ), 小区域移除(small area suppress)等。
3、视差计算–局部,全局,半全局
4、视差优化
二、SGM算法详解
1.
总结
提示:


![[附源码]Python计算机毕业设计电子病历系统Django(程序+LW)](https://img-blog.csdnimg.cn/984d64c5da654364bec30609a6eb9c92.png)
![[附源码]Node.js计算机毕业设计点餐系统设计Express](https://img-blog.csdnimg.cn/4a79625961404147810db8af70dd1f39.png)