最优化:建模、算法与理论
目前在学习 最优化:建模、算法与理论这本书,来此记录一下,顺便做一些笔记,在其中我也会加一些自己的理解,尽量写的不会那么的条条框框(当然最基础的还是要有)
第二章 基础知识
2.1 范数
2.1.1 向量范数
定义2.1(范数)称一个从向量空间Rn到实数域R的非负函数||·||为范数,如果他满足:
(1)正定性:对于所有的
v
∈
R
n
v{\in}R^n
v∈Rn,有
∣
∣
v
∣
∣
>
=
0
||v|| >= 0
∣∣v∣∣>=0,且
∣
∣
v
∣
∣
=
0
||v|| = 0
∣∣v∣∣=0 当且仅当
v
=
0
v=0
v=0
(2)齐次性:对于所有的
v
∈
R
n
v{\in}R^n
v∈Rn和
α
∈
R
{\alpha}{\in}R
α∈R,有
∣
∣
α
v
∣
∣
||{\alpha}v||
∣∣αv∣∣=
∣
α
∣
|{\alpha}|
∣α∣
∣
∣
v
∣
∣
||v||
∣∣v∣∣
(3)三角不等式:对于所有的
v
,
w
∈
R
n
v,w{\in}R^n
v,w∈Rn,有
∣
∣
v
+
w
∣
∣
<
=
∣
∣
v
∣
∣
+
∣
∣
w
∣
∣
||v+w|| <= ||v|| + ||w||
∣∣v+w∣∣<=∣∣v∣∣+∣∣w∣∣
最常用的向量范数为lp范数(p >= 1)
∣
∣
v
∣
∣
p
=
(
∣
v
1
∣
p
+
∣
v
2
∣
p
+
…
+
∣
v
n
∣
p
)
1
/
p
||v||_{p} = (|v_{1}|^p + |v_{2}|^p + \ldots + |v_{n}|^p)^{1/p}
∣∣v∣∣p=(∣v1∣p+∣v2∣p+…+∣vn∣p)1/p
显而易见,高数应该都学过,如果 p = ∞ p={\infty} p=∞,那么 l ∞ l_\infty l∞范数定义为 ∣ ∣ v ∣ ∣ ∞ = m a x ∣ v i ∣ ||v||_\infty = max|v_i| ∣∣v∣∣∞=max∣vi∣
记住
p
=
1
,
2
,
∞
p = 1,2,{\infty}
p=1,2,∞的时候最重要,有时候我们会忽略
l
2
l_2
l2范数的角标
也会遇到由正定矩阵
A
A
A诱导的范数,即
∣
∣
x
∣
∣
A
=
x
T
A
x
||x||_A = \sqrt{x^TAx}
∣∣x∣∣A=xTAx
对于
l
2
l_2
l2范数,有常用的柯西不等式,设
a
,
b
∈
R
n
a,b{\in}R^n
a,b∈Rn,则
∣
a
T
b
∣
<
=
∣
∣
a
∣
∣
2
∣
∣
b
∣
∣
2
|a^Tb|<=||a||_2||b||_2
∣aTb∣<=∣∣a∣∣2∣∣b∣∣2
等号成立当且仅当a与b线性相关
2.1.2 矩阵范数
矩阵范数首先也一样要满足那三个特性啦,就是要满足正定性,齐次性,三角不等式,常用的就是
l
1
,
l
2
l_1,l_2
l1,l2范数,当
p
=
1
p = 1
p=1时,矩阵
A
∈
R
m
∗
n
A{\in}R^{m*n}
A∈Rm∗n的范数定义
∣
∣
A
∣
∣
1
=
∑
i
=
1
m
∑
j
=
1
n
∣
a
i
j
∣
||A||_1={\sum_{i=1}^m}{\sum_{j=1}^n}|a_{ij}|
∣∣A∣∣1=i=1∑mj=1∑n∣aij∣
当
p
=
2
p=2
p=2时,也叫矩阵的Frobenius范数(F范数),记为
∣
∣
A
∣
∣
F
||A||_F
∣∣A∣∣F,其实就是所有元素的平方和然后开根号,具体定义如下
∣
∣
A
∣
∣
F
=
T
r
(
A
A
T
)
=
∑
i
,
j
a
i
j
2
||A||_F=\sqrt{Tr(AA^T)}=\sqrt{\sum_{i,j}a_{ij}^2}
∣∣A∣∣F=Tr(AAT)=i,j∑aij2
这里的
T
r
Tr
Tr表示方阵X的迹(这个大家应该都知道吧,我把百度的解释搬过来—在线性代数中,一个n×n矩阵A的主对角线(从左上方至右下方的对角线)上各个元素的总和被称为矩阵A的迹(或迹数),一般记作tr(A)),矩阵的F范数具有正交不变性。
正交不变性呢就是说对于正交矩阵
U
∈
R
m
∗
n
,
V
∈
R
m
∗
n
U{\in}R^{m*n},V{\in}R^{m*n}
U∈Rm∗n,V∈Rm∗n,我们有
∣
∣
U
A
F
∣
∣
F
2
=
∣
∣
A
∣
∣
F
2
||UAF||_F^2=||A||_F^2
∣∣UAF∣∣F2=∣∣A∣∣F2
具体的推导我这里就不写了哈,打公式太麻烦了哈哈,感兴趣的可以看这本书的第24页或者来找我^^
矩阵范数也可以由向量范数给诱导出来,一般称这种算数为诱导范数,感觉用的不是很多,这里先不扩展开了
除了上诉的1范数,2范数,另一个常用的矩阵范数是核范数,给定矩阵
A
∈
R
m
∗
n
A{\in}R^{m*n}
A∈Rm∗n,核范数定义为
∣
∣
A
∣
∣
∗
=
∑
i
=
1
r
σ
i
||A||_*=\sum_{i=1}^r{\sigma}_i
∣∣A∣∣∗=i=1∑rσi
其中
σ
i
,
i
=
1
,
2
,
.
.
.
,
r
{\sigma}_i,i=1,2,...,r
σi,i=1,2,...,r为
A
A
A的所有非0奇异值,
r
=
r
a
n
k
(
A
)
r=rank(A)
r=rank(A),类似于向量的
l
1
l_1
l1范数可以保稀疏性,我们也通常通过限制矩阵的核范数来保证矩阵的低秩性。
2.1.3 矩阵内积
内积一般用来表征两个矩阵之间的夹角,一个常用的内积—Frobenius内积,
m
∗
n
m*n
m∗n的矩阵
A
A
A和
B
B
B的Frobenius内积定义为
<
A
,
B
>
=
T
r
(
A
B
T
)
=
∑
i
=
1
m
∑
j
=
1
n
a
i
j
b
i
j
<A,B>=Tr(AB^T)=\sum_{i=1}^m\sum_{j=1}^na_{ij}b_{ij}
<A,B>=Tr(ABT)=i=1∑mj=1∑naijbij
其实就是两个矩阵一一对应元素相乘
同样的,我们也有矩阵范数对应的柯西不等式,设
A
,
B
∈
R
m
∗
n
A,B{\in}R^{m*n}
A,B∈Rm∗n,则
∣
<
A
,
B
>
∣
<
=
∣
∣
A
∣
∣
F
∣
∣
B
∣
∣
F
|<A,B>|<=||A||_F||B||_F
∣<A,B>∣<=∣∣A∣∣F∣∣B∣∣F
等号成立当且仅当A和B线性相关
2.2 导数
2.2.1 梯度与海瑟矩阵
梯度的定义(这玩意应该是我之前好像都没见到过的):给定函数
f
:
R
n
→
R
f:R^n{\rightarrow}R
f:Rn→R,且
f
f
f在点
x
x
x的一个邻域内有意义,若存在向量
g
∈
R
n
g{\in}R^n
g∈Rn满足
lim
p
→
0
f
(
x
+
p
)
−
f
(
x
)
−
g
T
p
∣
∣
p
∣
∣
=
0
\lim_{p{\rightarrow}0}\frac{f(x+p)-f(x)-g^Tp}{||p||}=0
p→0lim∣∣p∣∣f(x+p)−f(x)−gTp=0
就称
f
f
f在点
x
x
x处可微,此时
g
g
g称为
f
f
f在点
x
x
x处的梯度,记作
∇
f
(
x
)
{\nabla}f(x)
∇f(x),如果对区域D上的每一个点
x
x
x都有
∇
f
(
x
)
{\nabla}f(x)
∇f(x)存在,则称
f
f
f在D上可微
然后呢,这其中经过一系列的推导,就可以得到我们耳熟能详的梯度公式
∇
f
(
x
)
=
[
∂
f
(
x
)
∂
x
1
,
∂
f
(
x
)
∂
x
2
,
.
.
.
,
∂
f
(
x
)
∂
x
m
]
T
{\nabla}f(x)=\left[ \begin{matrix} {\frac{{\partial}f(x)}{{\partial}x_1}} ,{\frac{{\partial}f(x)}{{\partial}x_2}} ,...,{\frac{{\partial}f(x)}{{\partial}x_m}} \end{matrix} \right]^T
∇f(x)=[∂x1∂f(x),∂x2∂f(x),...,∂xm∂f(x)]T
对于多元函数,我们可以定义其海瑟矩阵:如果函数
f
(
x
)
:
R
n
→
R
f(x):R^n{\rightarrow}R
f(x):Rn→R在点
x
x
x处的二阶偏导数
∂
2
f
(
x
)
∂
x
i
∂
x
j
i
,
j
=
1
,
2
,
.
.
.
,
n
\frac{{\partial}^2f(x)}{{\partial}x_i{\partial}x_j}i,j=1,2,...,n
∂xi∂xj∂2f(x)i,j=1,2,...,n都存在,则
∇
2
f
(
x
)
=
[
∂
2
f
(
x
)
∂
x
1
2
∂
2
f
(
x
)
∂
x
1
∂
x
2
⋯
∂
2
f
(
x
)
∂
x
1
∂
x
n
∂
2
f
(
x
)
∂
x
2
∂
x
1
∂
2
f
(
x
)
∂
x
2
2
⋯
∂
2
f
(
x
)
∂
x
2
∂
x
n
⋮
⋮
⋮
∂
2
f
(
x
)
∂
x
n
∂
x
1
∂
2
f
(
x
)
∂
x
n
∂
x
2
⋯
∂
2
f
(
x
)
∂
x
n
2
]
{\nabla}^2f(x)=\left[ \begin{matrix} \frac{{\partial}^2f(x)}{{\partial}x_1^2} & \frac{{\partial}^2f(x)}{{\partial}x_1{\partial}x_2} & \cdots& \frac{{\partial}^2f(x)}{{\partial}x_1{\partial}x_n}\\ \frac{{\partial}^2f(x)}{{\partial}x_2{\partial}x_1} &\frac{{\partial}^2f(x)}{{\partial}x_2^2} & \cdots & \frac{{\partial}^2f(x)}{{\partial}x_2{\partial}x_n} \\ \vdots & \vdots & &\vdots\\ \frac{{\partial}^2f(x)}{{\partial}x_n{\partial}x_1} &\frac{{\partial}^2f(x)}{{\partial}x_n{\partial}x_2} & \cdots &\frac{{\partial}^2f(x)}{{\partial}x_n^2} \end{matrix} \right]
∇2f(x)=
∂x12∂2f(x)∂x2∂x1∂2f(x)⋮∂xn∂x1∂2f(x)∂x1∂x2∂2f(x)∂x22∂2f(x)⋮∂xn∂x2∂2f(x)⋯⋯⋯∂x1∂xn∂2f(x)∂x2∂xn∂2f(x)⋮∂xn2∂2f(x)
成为
f
f
f在点
x
x
x处的海瑟矩阵
当
∇
2
f
(
x
)
{\nabla}^2f(x)
∇2f(x)在区域D上每个点
x
x
x都存在,就称
f
f
f在D上二阶可微,若他在D上还连续,可以证明此时的海瑟矩阵是一个对称矩阵
当
f
:
R
n
→
R
m
f:R^n{\rightarrow}R^m
f:Rn→Rm是向量值函数时,我们可以定义他的雅可比矩阵
J
(
x
)
∈
R
m
∗
n
J(x){\in}R^{m*n}
J(x)∈Rm∗n,他的第i行分量
f
i
(
x
)
f_i(x)
fi(x)梯度的转置,即
J
(
x
)
=
[
∂
f
1
(
x
)
∂
x
1
∂
f
1
(
x
)
∂
x
2
⋯
∂
f
1
(
x
)
∂
x
n
∂
f
2
(
x
)
∂
x
1
∂
f
2
(
x
)
∂
x
2
⋯
∂
f
2
(
x
)
∂
x
n
⋮
⋮
⋮
∂
f
m
(
x
)
∂
x
1
∂
f
m
(
x
)
∂
x
2
⋯
∂
f
m
(
x
)
∂
x
n
]
J(x)=\left[ \begin{matrix} \frac{{\partial}f_1(x)}{{\partial}x_1} & \frac{{\partial}f_1(x)}{{\partial}x_2} & \cdots& \frac{{\partial}f_1(x)}{{\partial}x_n}\\ \frac{{\partial}f_2(x)}{{\partial}x_1} & \frac{{\partial}f_2(x)}{{\partial}x_2} & \cdots& \frac{{\partial}f_2(x)}{{\partial}x_n}\\ \vdots & \vdots & &\vdots\\ \frac{{\partial}f_m(x)}{{\partial}x_1} & \frac{{\partial}f_m(x)}{{\partial}x_2} & \cdots& \frac{{\partial}f_m(x)}{{\partial}x_n} \end{matrix} \right]
J(x)=
∂x1∂f1(x)∂x1∂f2(x)⋮∂x1∂fm(x)∂x2∂f1(x)∂x2∂f2(x)⋮∂x2∂fm(x)⋯⋯⋯∂xn∂f1(x)∂xn∂f2(x)⋮∂xn∂fm(x)
容易看出,梯度
∇
f
(
x
)
{\nabla}f(x)
∇f(x)的雅可比矩阵就是f(x)的海瑟矩阵
类似于一元函数的泰勒展开,对于多元函数,这里也不加证明的给出泰勒展开
设
f
:
R
n
→
R
f:R^n{\rightarrow}R
f:Rn→R是连续可微的,
p
∈
R
n
p{\in}R^n
p∈Rn,那么
f
(
x
+
p
)
=
f
(
x
)
+
∇
(
x
+
t
p
)
T
p
f(x+p)=f(x)+{\nabla}(x+tp)^Tp
f(x+p)=f(x)+∇(x+tp)Tp
其中
0
<
t
<
1
0<t<1
0<t<1,进一步,如果说
f
f
f是二阶连续可微的
f
(
x
+
p
)
=
f
(
x
)
+
∇
f
(
x
)
T
p
+
1
2
p
T
∇
2
f
(
x
+
t
p
)
p
f(x+p)=f(x)+{\nabla}f(x)^Tp+\frac{1}{2}p^T{\nabla}^2f(x+tp)p
f(x+p)=f(x)+∇f(x)Tp+21pT∇2f(x+tp)p
其中
0
<
t
<
1
0<t<1
0<t<1
最后呢这一章还介绍了一类特殊的可微函数-----梯度利普希茨连续的函数,这类函数在很多优化算法收敛性证明中起着关键作用
梯度利普希茨连续定义:给定可微函数
f
f
f,若存在
L
>
0
L>0
L>0,对任意
x
,
y
∈
d
o
m
f
x,y{\in}domf
x,y∈domf有(
d
o
m
f
domf
domf就是
f
f
f的定义域)
∣
∣
∇
f
(
x
)
−
∇
f
(
y
)
∣
∣
≤
L
∣
∣
x
−
y
∣
∣
||{\nabla}f(x)-{\nabla}f(y)||{\le}L||x-y||
∣∣∇f(x)−∇f(y)∣∣≤L∣∣x−y∣∣
则称
f
f
f是梯度利普希茨连续的,相应利普希茨常数为
L
L
L,有时候也会称为
L
L
L-光滑,或者梯度
L
L
L-利普希茨连续
梯度利普希茨连续表明,
∇
f
(
x
)
{\nabla}f(x)
∇f(x)的变化可以被自变量
x
x
x的变化所控制,满足该性质的函数有很多很好的性质, 一个重要的性质就是具有二次上界
具体证明我这里我就不再过多阐述了,有二次上界就是说
f
(
x
)
f(x)
f(x)可以被一个二次函数上界所控制,即要求说
f
(
x
)
f(x)
f(x)的增长速度不超过二次
还有一个推论就是说,如果
f
f
f是梯度利普希茨连续的,且有一个全局最小点
x
∗
x^*
x∗,我们可以利用二次上界来估计
f
(
x
)
−
f
(
x
∗
)
f(x)-f(x^*)
f(x)−f(x∗)的大小,其中
x
x
x可以是定义域中任意一点
1
2
L
∣
∣
∇
f
(
x
)
∣
∣
2
≤
f
(
x
)
−
f
(
x
∗
)
\frac{1}{2L}||{\nabla}f(x)||^2{\le}f(x)-f(x^*)
2L1∣∣∇f(x)∣∣2≤f(x)−f(x∗)
具体的证明我这里就不写了哈,想知道的可以百度或者我们讨论一下
2.2.2 矩阵变量函数的导数
多元函数梯度的定义也可以推广到变量是矩阵的情况,以
m
∗
n
m*n
m∗n矩阵
X
X
X为自变量的函数
f
(
X
)
f(X)
f(X),若存在矩阵
G
∈
R
m
∗
n
G{\in}R^{m*n}
G∈Rm∗n满足
lim
V
→
0
f
(
X
+
V
)
−
f
(
X
)
−
<
G
,
V
>
∣
∣
V
∣
∣
=
0
\lim_{V{\rightarrow}0}\frac{f(X+V)-f(X)-<G,V>}{||V||}=0
V→0lim∣∣V∣∣f(X+V)−f(X)−<G,V>=0
其中
∣
∣
⋅
∣
∣
||·||
∣∣⋅∣∣是任意矩阵范数,就称矩阵向量函数
f
f
f在
X
X
X处
F
r
a
ˊ
c
h
e
t
Fr\acute{a}chet
Fraˊchet可微,就称G为
f
f
f在
F
r
a
ˊ
c
h
e
t
Fr\acute{a}chet
Fraˊchet可微意义下的梯度,其实矩阵变量函数
f
(
X
)
f(X)
f(X)的梯度也可以用其偏导数表示为
∇
f
(
x
)
=
[
∂
f
∂
x
11
∂
f
∂
x
12
⋯
∂
f
∂
x
1
n
∂
f
∂
x
21
∂
f
∂
x
22
⋯
∂
f
∂
x
2
n
⋮
⋮
⋮
∂
f
∂
x
m
1
∂
f
∂
x
m
2
⋯
∂
f
∂
x
m
n
]
{\nabla}f(x)=\left[ \begin{matrix} \frac{{\partial}f}{{\partial}x_{11}} & \frac{{\partial}f}{{\partial}x_{12}} & \cdots& \frac{{\partial}f}{{\partial}x_{1n}}\\ \frac{{\partial}f}{{\partial}x_{21}} & \frac{{\partial}f}{{\partial}x_{22}} & \cdots& \frac{{\partial}f}{{\partial}x_{2n}}\\ \vdots & \vdots & &\vdots\\ \frac{{\partial}f}{{\partial}x_{m1}} & \frac{{\partial}f}{{\partial}x_{m2}} & \cdots& \frac{{\partial}f}{{\partial}x_{mn}} \end{matrix} \right]
∇f(x)=
∂x11∂f∂x21∂f⋮∂xm1∂f∂x12∂f∂x22∂f⋮∂xm2∂f⋯⋯⋯∂x1n∂f∂x2n∂f⋮∂xmn∂f
F
r
a
ˊ
c
h
e
t
Fr\acute{a}chet
Fraˊchet可微的定义和使用往往比较繁琐,为此还有另一种定义-----
G
a
^
t
e
a
u
x
G\hat{a}teaux
Ga^teaux可微
定义:设
f
(
X
)
f(X)
f(X)为矩阵变量函数,如果存在矩阵
G
∈
R
m
∗
n
G{\in}R^{m*n}
G∈Rm∗n对任意方向
V
∈
R
m
∗
n
V{\in}R^{m*n}
V∈Rm∗n满足
lim
t
→
0
f
(
X
+
t
V
)
−
f
(
X
)
−
t
<
G
,
V
>
t
=
0
\lim_{t{\rightarrow}0}\frac{f(X+tV)-f(X)-t<G,V>}{t}=0
t→0limtf(X+tV)−f(X)−t<G,V>=0
则称
f
f
f关于
X
X
X是
G
a
^
t
e
a
u
x
G\hat{a}teaux
Ga^teaux的,就称G为
f
f
f在
G
a
^
t
e
a
u
x
G\hat{a}teaux
Ga^teaux可微意义下的梯度
若
F
r
a
ˊ
c
h
e
t
Fr\acute{a}chet
Fraˊchet可微可以推出
G
a
^
t
e
a
u
x
G\hat{a}teaux
Ga^teaux可微,反之则不可以,但这本书讨论的函数基本都是
F
r
a
ˊ
c
h
e
t
Fr\acute{a}chet
Fraˊchet可微的,所以我们目前无需讨论,大家了解一下就好了~,统一将矩阵变量函数
f
(
X
)
f(X)
f(X)的导数记为
∂
f
∂
X
\frac{{\partial}f}{{\partial}X}
∂X∂f或者
∇
f
(
X
)
{\nabla}f(X)
∇f(X)
举个例子把,免得大家不知道有什么用
考虑线性函数:
f
(
X
)
=
T
r
(
A
X
T
B
)
f(X)=Tr(AX^TB)
f(X)=Tr(AXTB),其中
A
∈
R
p
∗
n
,
B
∈
R
m
∗
p
,
X
∈
R
m
∗
n
A{\in}R^{p*n},B{\in}R^{m*p},X{\in}R^{m*n}
A∈Rp∗n,B∈Rm∗p,X∈Rm∗n对任意方向
V
∈
R
m
∗
n
V{\in}R^{m*n}
V∈Rm∗n以及
t
∈
R
t{\in}R
t∈R,有
lim
t
→
0
f
(
X
+
t
V
)
−
f
(
X
)
t
=
lim
t
→
0
T
r
(
A
(
X
+
t
V
)
T
B
−
T
r
(
A
X
T
B
)
)
t
\lim_{t{\rightarrow}0}\frac{f(X+tV)-f(X)}{t}=\lim_{t{\rightarrow}0}\frac{Tr(A(X+tV)^TB-Tr(AX^TB))}{t}
t→0limtf(X+tV)−f(X)=t→0limtTr(A(X+tV)TB−Tr(AXTB))
=
T
r
(
A
V
T
B
)
=
<
B
A
,
V
>
=Tr(AV^TB)=<BA,V>
=Tr(AVTB)=<BA,V>
所以,
∇
f
(
X
)
=
B
A
{\nabla}f(X)=BA
∇f(X)=BA
我学到这里时候会有一个疑问,就是
T
r
(
A
V
T
B
)
=
<
B
A
,
V
>
Tr(AV^TB)=<BA,V>
Tr(AVTB)=<BA,V>是为什么呢?
我们知道,
T
r
(
A
V
T
B
)
=
T
r
(
B
A
V
T
)
Tr(AV^TB)=Tr(BAV^T)
Tr(AVTB)=Tr(BAVT)这个是迹的基本性质,
B
A
BA
BA和
V
V
V都是
m
∗
n
m*n
m∗n的,那么这时候又有一个性质,假设C和D是相同规模的矩阵,那么
T
r
(
A
T
B
)
=
<
A
,
B
>
Tr(A^TB)=<A,B>
Tr(ATB)=<A,B>
我这里是参考知乎jordi的,这是他的一个关于3*3矩阵的推导
链接:https://www.zhihu.com/question/274052744/answer/1521521561
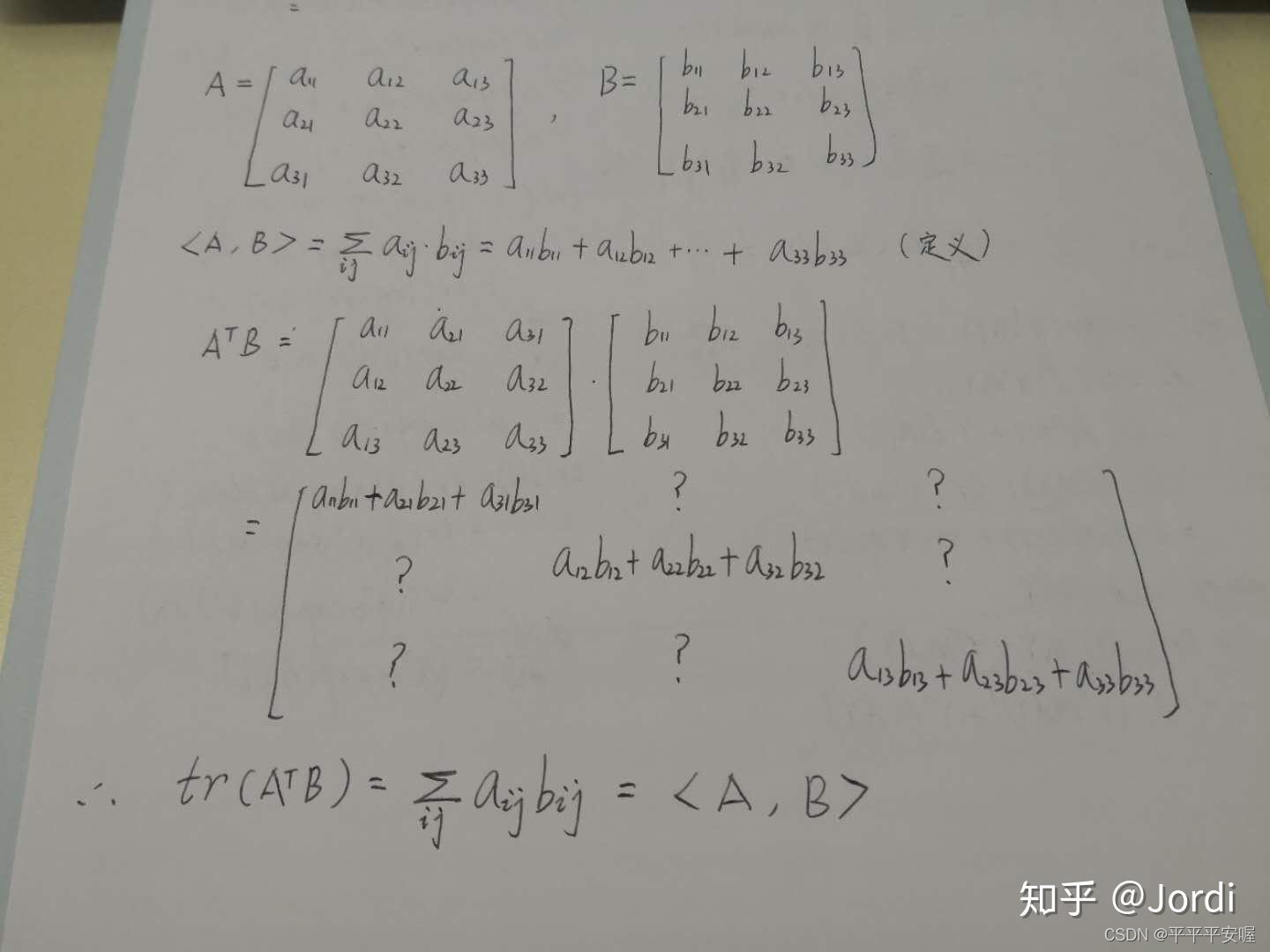
那么这样就可以推出
T
r
(
A
V
T
B
)
=
T
r
(
V
T
,
B
A
)
=
<
B
A
,
V
>
Tr(AV^TB)=Tr(V^T,BA)=<BA,V>
Tr(AVTB)=Tr(VT,BA)=<BA,V>啦
2.2.3 自动微分
自动微分是使用计算机导数的算法,在神经网络中,我们通过前向传播的方式将输入数据
a
a
a转化为
y
^
\hat{y}
y^,也就是将输入数据
a
a
a作为初始信息,将其传递到隐藏层的每个神经元,处理后输出得到
y
^
\hat{y}
y^。
通过比较输出得到
y
^
\hat{y}
y^与真实标签y,可以定义一个损失函数
f
(
x
)
f(x)
f(x),其中
x
x
x表示所有神经元对饮的参数集合,
f
(
x
)
f(x)
f(x)一般是多个函数复合的形式,为了找到最优的参数,我们需要通过优化算法来调整
x
x
x使得
f
(
x
)
f(x)
f(x)达到最小,因此,对神经元参数
x
x
x的计算是不可避免的
这一块就是讲了一个神经网络的前向传播和后向求导,自动微分有两种方式,前向模式和后向模式,前向模式就是变传播变求导,后向模式就是前传播再一层层求导,很显然现在大家学的都是后向模式这种的吧,因为他复杂度更低,计算代价小
2.3 广义实值函数
数学分析的课程中我们学习了函数的基本概念,函数是从向量空间
R
n
R^n
Rn到数据域
R
R
R的映射,而在最优化领域,经常涉及到对某个函数的某一个变量取inf(sup)操作,这导致函数的取值可能为无穷,为了能更方便的描述优化问题,我们需要对函数的定义进行某种扩展。
那么 what is 广义实值函数呢?
令
R
ˉ
=
R
⋃
∞
\bar{R}=R{\bigcup}{\infty}
Rˉ=R⋃∞为广义实数空间,则映射
f
:
R
n
→
R
ˉ
f:R^n{\rightarrow}\bar{R}
f:Rn→Rˉ称为广义实值函数,可以看到,就是值域多了两个特殊的值,正负无穷
2.3.1 适当函数
适当函数:给定广义实值函数
f
f
f和非空集合
X
X
X,如果存在
x
∈
X
x{\in}X
x∈X使得
f
(
x
)
<
+
∞
f(x)<+{\infty}
f(x)<+∞,并且对任意的
x
∈
X
x{\in}X
x∈X,都有
f
(
x
)
>
−
∞
f(x)>-{\infty}
f(x)>−∞,那么称函数
f
f
f关于集合
X
X
X是适当的
总结一下,就是说适当函数
f
f
f呢,至少有一处的取值不为正无穷,以及处处取值不为负无穷。对于最优化问题,适当函数可以帮助我们去掉一些不感兴趣的函数,从一个比较合理的函数类去考虑问题。这应该很好理解,我们加入讨论一个min问题,他至少有个取值不能为正无穷吧,要不然怎么取min,然后处处取值不能为负无穷,要不讨论有啥意义对吧?
我们约定,若本书无特殊说明,定理中所讨论的函数均为适当函数
对于适当函数
f
f
f,规定其定义域
d
o
m
f
=
{
x
∣
f
(
x
)
<
+
∞
}
domf=\{x|f(x)<+{\infty}\}
domf={x∣f(x)<+∞}
因为对于适当函数的最小值肯定不可能在正无穷处取到^^
2.3.2 闭函数
闭函数是另一类重要的广义实值函数,闭函数可以看作是连续函数的一种推广
在说闭函数之前,我们先引入一些基本概念:
1.下水平集
下水平集是描述实值函数取值的一个重要概念:为此有如下定义
(
α
\alpha
α-下水平集)对于广义实值函数:
f
:
R
n
→
R
ˉ
f:R^n{\rightarrow}\bar{R}
f:Rn→Rˉ
C
α
=
{
x
∣
f
(
x
)
≤
α
}
C_{\alpha}=\{x|f(x)\le{\alpha}\}
Cα={x∣f(x)≤α}
称为
f
f
f的
α
\alpha
α-下水平集
就是取值不能超过
α
\alpha
α嘛,若
C
α
C_{\alpha}
Cα非空,我们知道
f
(
x
)
f(x)
f(x)的全局最小点一定落在
C
α
C_{\alpha}
Cα中,无需考虑之外的点
2.上方图
上方图是从集合的角度来描述一个函数的具体性质,有如下定义:
对于广义实值函数
f
:
R
n
→
R
ˉ
f:R^n{\rightarrow}\bar{R}
f:Rn→Rˉ
e
p
i
f
=
{
(
x
,
t
)
∈
R
n
+
1
∣
f
(
x
)
≤
t
}
epif=\{(x,t){\in}R^{n+1}|f(x){\le}t\}
epif={(x,t)∈Rn+1∣f(x)≤t}
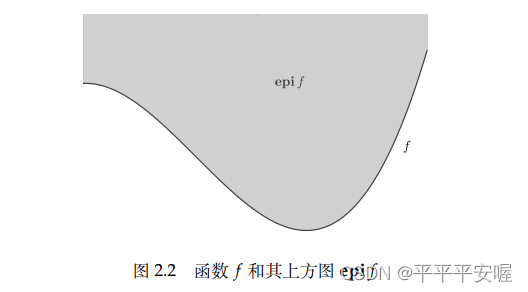
说人话就是函数
f
f
f上方的东西小于等于t(t取任意值),
f
f
f的很多性质都可以通过
e
p
i
f
epif
epif得到,可以通过
e
p
i
f
epif
epif的一些性质
f
f
f的性质
3.闭函数、下半连续函数
闭函数:设
f
:
R
n
→
R
ˉ
f:R^n{\rightarrow}\bar{R}
f:Rn→Rˉ为广义实值函数,若
e
p
i
f
epif
epif为闭集,则称
f
f
f为闭函数
下半连续函数:设广义实值函数
f
:
R
n
→
R
ˉ
f:R^n{\rightarrow}\bar{R}
f:Rn→Rˉ,若对任意的
x
∈
R
n
x{\in}R^n
x∈Rn,有
lim inf
y
→
x
f
(
y
)
≥
f
(
x
)
\liminf_{y{\rightarrow}x} f(y)\ge{f(x)}
y→xliminff(y)≥f(x)
则
f
(
x
)
f(x)
f(x)为下半连续函数
我觉得如果不懂这个下极限的话,直接看文字会好得多
其实就是在
x
0
x_0
x0处的邻域处,如果 f(
x
0
x_0
x0) 减去一个正的微小值,从而可以恒小于该邻域的所有
f
(
x
)
f(x)
f(x),则称在该间断点处有下半连续性。
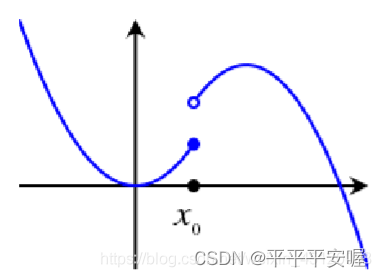
如果是下图这样的
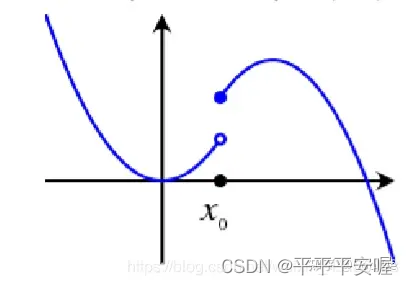
你的
x
0
x_0
x0再往左边取哪怕一点点,都会骤降,就达不到
x
0
x_0
x0的邻域中的
x
x
x比
f
(
x
0
)
−
ε
f(x_0)-{\varepsilon}
f(x0)−ε大,而如果是第一张图,我们可以保证
x
0
x_0
x0的左边不会骤降,差不多就是这个意思
设广义实值函数
f
:
R
n
→
R
ˉ
f:R^n{\rightarrow}\bar{R}
f:Rn→Rˉ。则以下命题等价:
(1)
f
(
x
)
f(x)
f(x)的任意
α
\alpha
α-下水平集都是闭集
(2)
f
(
x
)
f(x)
f(x)是下半连续的
(3)
f
(
x
)
f(x)
f(x)是闭函数
具体证明我就不在这细细展开了,同理,想知道可以和我探讨或者自行谷歌~
闭集: 如果对任意收敛序列,最终收敛到的点都在集合内,那么集合是闭的
我们可以看到,其实闭函数和下半连续函数可以等价,以后往往只会出现一种定义
闭(下半连续)函数间的简单运算会保持原有性质
(1)加法,若
f
f
f和
g
g
g均为适当的闭函数,并且
d
o
m
f
⋂
d
o
m
g
≠
∅
domf {\bigcap}domg{\neq}∅
domf⋂domg=∅则
f
+
g
f+g
f+g也是闭函数,说是适当是避免出现未定式的情况,也就是负无穷+正无穷
(2)仿射映射的复合,若
f
f
f为闭函数,则
f
(
A
x
+
b
)
f(Ax+b)
f(Ax+b)也为闭函数
(3)取上确界,若每一个函数
f
α
f_{\alpha}
fα均为闭函数,则
s
u
p
α
f
α
(
x
)
sup_{\alpha}f_{\alpha}(x)
supαfα(x)也为闭函数。