rk3399移植linux kernel
- 0.前言
- 一、移植ubuntu根文件系统
- 二、移植linux
- 1.支持NFS(可选)
- 2.配置uevent helper
- 3.支持etx4文件系统(默认已支持)
- 4.配置DRM驱动
- 5.有线网卡驱动
- 6.无线网卡驱动
- 三、设备树
- 四、内核镜像文件制作
- 五、烧录
- 六、总结
参考文章:
1.RK3399移植u-boot
2.I.MX6Q-SDB开发板移植ubuntu
3.Rockchip RK3399 - 移植ubuntu 20.04.4根文件系统
4.Rockchip RK3399 - 移植uboot 2023.04 & linux 6.3
0.前言
在前一节中移植了rk3399的u-boot,这一节就继续移植linux kernel。不过rk3399在移植kenel前,需要先制作根文件系统,这样才能在生成内核镜像文件Image时,将根文件系统的相关信息填入。
一、移植ubuntu根文件系统
这里就不再赘述移植步骤,参考之前对i.mx6Q移植的步骤即可。不过有一些步骤略有不同,比如暂时先不配置串口的输出,后续启动板卡到u-boot界面再进行配置。另外,制作好的根文件系统需要打包成.img格式。这里就简述下打包步骤作为记录:
制作好的ubuntu根文件系统在ubuntu_base目录下,在同级目录下新建一个目录ubuntu_ext4_mount,用于挂载虚拟磁盘,并格式化成ext4格式:
mkdir ubuntu_ext4_mount
#挂载虚拟磁盘
sudo dd if=/dev/zero of=ubuntu_ext4.img bs=1M count=1300
#格式化
sudo mkfs.ext4 ubuntu_ext4.img
#挂载img镜像
sudo mount ubuntu_ext4.img ubuntu_ext4_mount/
#拷贝根文件系统
sudo cp ubuntu_base/* ubuntu_ext4_mount/ -af
其中count为根文件系统大小的2倍,可以使用du -h --max-depth=1命令查看目录大小。
之后就可以卸载并删除ubuntu_ext4_mount目录,然后检查下制作好的img即可:
umount ubuntu_ext4_mount
rm -rf ubuntu_rootfs
#用e2fsck修复及检测镜像文件系统
e2fsck -p -f ubuntu_ext4.img
#resize2fs减小镜像文件的大小
resize2fs -M ubuntu_ext4_rootfs.img
二、移植linux
官网下载地址:https://www.kernel.org/
镜像下载站:http://ftp.sjtu.edu.cn/sites/ftp.kernel.org/pub/linux/kernel/。
这里下载最新的linux-6.4.7并解压:
tar -xvf linux-6.4.7.tar.gz
修改顶层makefile中的目标平台及交叉编译链:

由于官方kernel只有一个默认配置,所以需要对其进行一些裁剪。
#配置文件存放位置
ll arch/arm64/configs/defconfig
#加载默认配置
make defconfig
#手动裁剪
make menuconfig
1.支持NFS(可选)
NFS为网络文件系统,如果后续需要对内核或文件系统进行开发,用NFS会更加方便,这里先勾选上。

2.配置uevent helper
该选项的作用是启用uevent helper程序的支持。uevent是内核与用户空间之间通信的一种方式,当内核检测到新的设备时,会生成一个uevent来通知用户空间,使得用户空间能够及时响应设备插拔事件,并做出相应的处理。其中, uevent helper程序就是在接收到uevent后执行的用户空间程序,用来完成设备的热插拔处理。

3.支持etx4文件系统(默认已支持)

4.配置DRM驱动
DRM,全称Direct Rending Manger。是目前Linux主流的图形显示框架,配置这个是为了后续支持带有桌面的ubuntu根文件系统。

5.有线网卡驱动
板子上带了一个RTL8111有线网卡,按照以下配置:
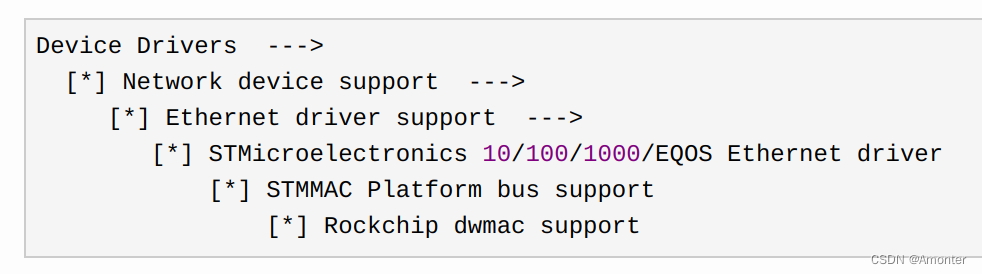
注:在6.4版本中STMicroelectronics 10/100/1000/EQOS Ethernet driver改成了STMicroelectronics Multi-Gigabit Ethernet driver。
6.无线网卡驱动
板载AP6236无线网卡,按照如下进行配置:
Device Drivers --->
<*> Broadcom specific AMBA --->
[*] Support for BCMA on PCI-host bus (NEW)
[*] Support for BCMA in a SoC
[*] ChipCommon-attached serial flash support (NEW)
[*] BCMA Broadcom GBIT MAC COMMON core driver
[*] BCMA GPIO driver
配置完保存即可。
三、设备树
这里笔者使用的设备树是从网上找到的反编译出的dts文件,可以直接拿来使用,所以就先略过。将该dts添加进dtb编译目录即可。
四、内核镜像文件制作
编译完成后会在arch/arm64/boot/文件夹下生成内核镜像文件Image.gz,因为mkimage是根据its文件中的描述来打包镜像生成itb文件(FIT uImage),所以首先需要制作一个its文件,在its文件中描述需要被打包的镜像,主要是kernel镜像,dtb文件等。
kernel.its:
/*
* Simple U-Boot uImage source file containing a single kernel and FDT blob
*/
/dts-v1/;
/ {
description = "Simple image with single Linux kernel and FDT blob";
#address-cells = <1>;
images {
kernel {
description = "Vanilla Linux kernel";
data = /incbin/("arch/arm64/boot/Image.gz");
type = "kernel";
arch = "arm64";
os = "linux";
compression = "gzip";
load = <0x280000>;
entry = <0x280000>;
hash-1 {
algo = "crc32";
};
hash-2 {
algo = "sha1";
};
};
fdt {
description = "Flattened Device Tree blob";
data = /incbin/("arch/arm64/boot/dts/rockchip/rk3399_sw799.dtb");
type = "flat_dt";
arch = "arm64";
compression = "none";
load = <0x8300000>;
entry = <0x8300000>;
hash-1 {
algo = "crc32";
};
hash-2 {
algo = "sha1";
};
};
};
configurations {
default = "conf-1";
conf-1 {
description = "Boot Linux kernel with FDT blob";
kernel = "kernel";
fdt = "fdt";
};
};
};
然后将u-boot-2023.07/tools/路径下的mkimage工具拷贝过来,使用mkimage工具编译即可:
cp u-boot-2023.07/tools/mkimage linux-6.4.7/
./mkimage -f kernel.its kernel.itb
五、烧录
相关文件已全部制作完毕,如果不需要在u-boot下进行功能开发,则使用前一节制作的u-boot即可。如有需要,由于较新版本的u-boot也分成了u-boot + 设备树dtb的方式,所以在编译u-boot时将相关设备树指定为自己板子的设备树进行编译即可。
rk3399烧录地址:
idbloader.img ---> eMMC的0x40扇区
u-boot.itb ---> 0x4000扇区
kernel.itb ---> 0x8000扇区
ubuntu_ext4.img ---> 0x40000扇区
除了上述的几个文件,rk3399还需要一个rk3399_loader_v1.24.126.bin文件,这个文件在芯片启动时,会被加载到内部的sram中,用来初始化板载内存等基本外设。此文件从rockchip官方即可下载。
烧录工具有两种,一种是使用rockchip官方的RKDevTool,这个需要在windows环境下运行。另一种是使用rkdeveloptool,可以在linux下使用命令行进行烧录,具体的使用方式可以参考这篇文章,笔者使用的也是这种方式。将芯片进入Loader模式或Maskrom模式,然后使用以下命令将对应文件烧写到板卡上去:
rkdeveloptool db rkxx_loader_vx.xx.bin
rkdeveloptool wl 0x40 idbLoader.img
rkdeveloptool wl 0x4000 uboot.itb
rkdeveloptool wl 0x8000 boot.itb
rkdeveloptool wl 0x40000 ubuntu_ext4.img
六、总结
笔者制作的kernel中没有使能对应的GPU驱动,所以后续使用桌面显示的话会比较卡,且CPU占用较高,发热严重。所以最后笔者还是沿用了大佬移植的armbian系统(躺平真爽)。这里附上对应的镜像和工具下载地址,如果是同款SW799板子可以使用对应的镜像烧录使用,这里还有一些其他板子和一些简单教程,也可以借鉴一点。硬件就先玩到这里了,后面找点嵌入式小demo做做看看。






![智慧水利整体解决方案[43页PPT]](https://img-blog.csdnimg.cn/img_convert/fac9d85bb599af888c0454fe96fa7ff1.jpeg)