AT24C02
-
8个字节每页,累计32个页
-
通讯频率MAX = 400K
-
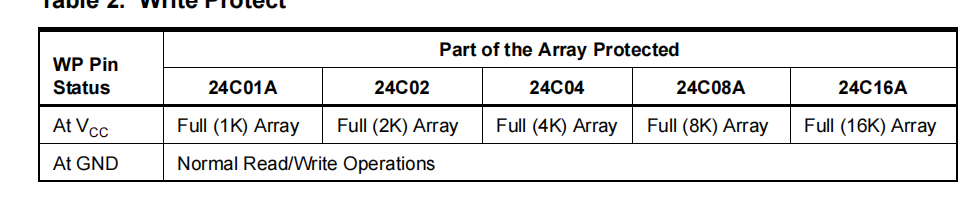
AT24C02大小 2K
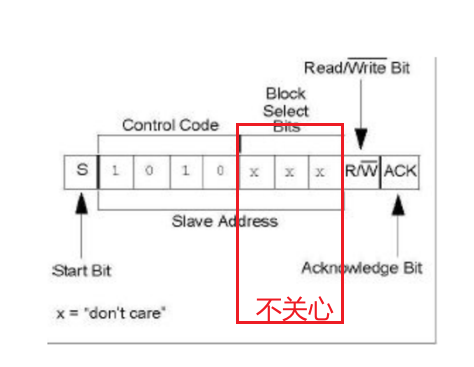
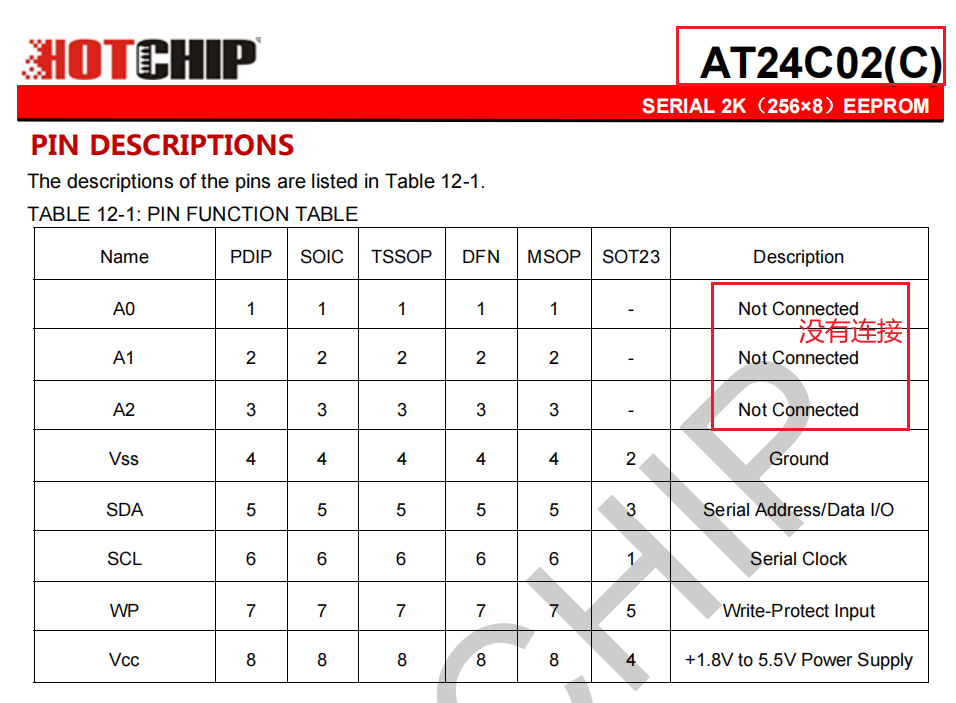
- 芯片地址
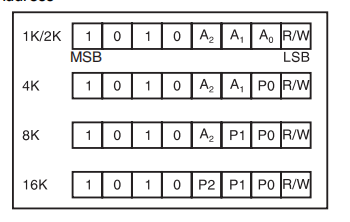
对于at24c02 A2A1A0 这三个引脚没有使用
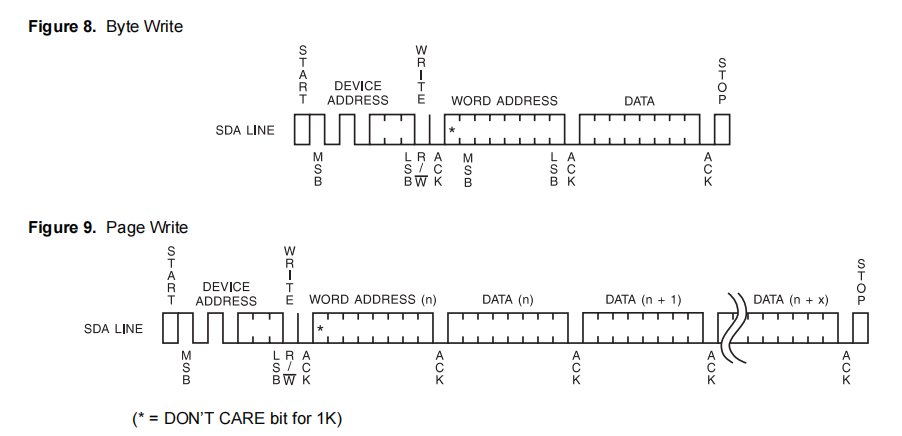
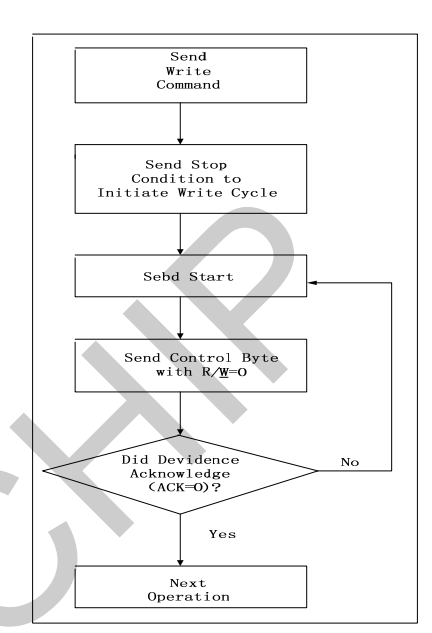
- 写时序
由于设备在写周期中不会产生ACK恢复,因此这可用于确定周期何时完成(此特性可用于最大限度地提高总线吞吐量)。一旦从主服务器发出了写命令的停止条件,设备就会启动内部定时的写周期,然后就可以立即启动ACK轮询。这涉及到主服务器发送一个开始条件,然后是一个写命令的控制字节(R/W =0)。如果设备仍忙于写入周期,则不会返回ACK。如果循环完成,设备将返回ACK,然后主命令可以继续下一个读或写命令。该操作的流程图见图5-1。
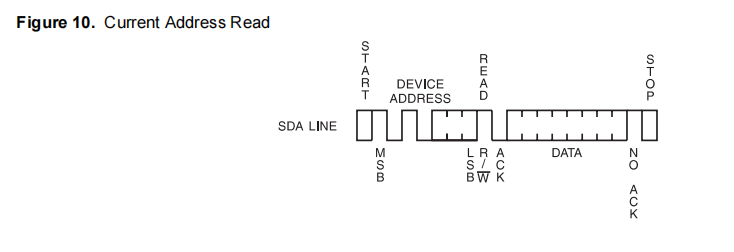
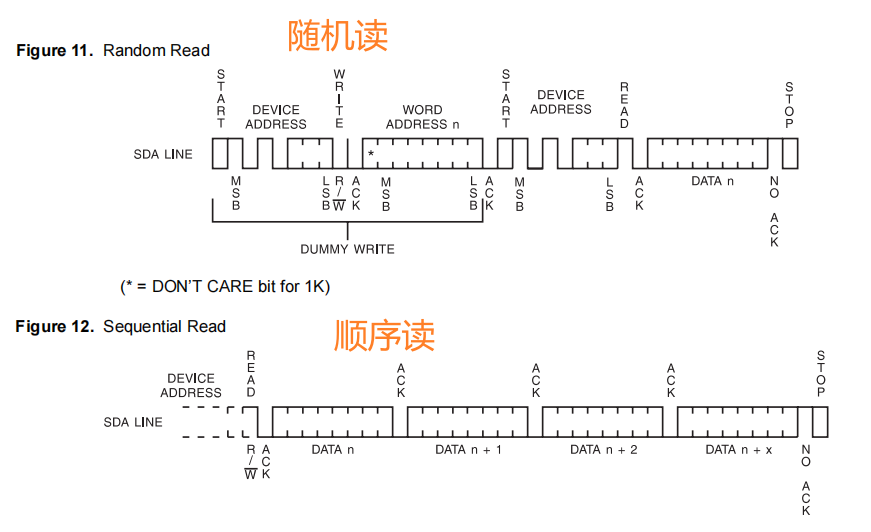
- 读时序
at24c2.h
#ifndef _24CXX_H
#define _24CXX_H
#include <stdint.h>
#define AT24C01 127
#define AT24C02 255
#define AT24C04 511
#define AT24C08 1023
#define AT24C16 2047
#define AT24C32 4095
#define AT24C64 8191
#define AT24C128 16383
#define AT24C256 32767
//定义EE_TYPE为AT24C16
#define EE_TYPE AT24C16
uint8_t AT24CXX_ReadOneByte(uint16_t ReadAddr); //指定地址读取一个字节
void AT24CXX_WriteOneByte(uint16_t WriteAddr,uint8_t DataToWrite); //指定地址写入一个字节
void AT24CXX_WriteLenByte(uint16_t WriteAddr,uint32_t DataToWrite,uint8_t Len);//指定地址开始写入指定长度的数据
uint32_t AT24CXX_ReadLenByte(uint16_t ReadAddr,uint8_t Len); //指定地址开始读取指定长度数据
void AT24CXX_Write(uint16_t WriteAddr,uint8_t *pBuffer,uint16_t NumToWrite); //从指定地址开始写入指定长度的数据
void AT24CXX_Read(uint16_t ReadAddr,uint8_t *pBuffer,uint16_t NumToRead); //从指定地址开始读出指定长度的数据
void AT24CXX_Erasure(uint16_t NumToWrite); /*从地址0开始将指定个数的地址清0*/
uint8_t AT24CXX_Check(void); //检查器件
void AT24CXX_Init(void); //初始化IIC
#endif
at24c2.c
#include "at24c02.h"
#include "n32l40x.h"
//#include "delay.h"
//#include "debug.h"
//IO方向设置
//#define SDA_OUT {GPIOC->MODER |= 0x00040000;} // 设置SDA为输出方向,对于双向I/O需切换为输出
//#define SDA_IN {GPIOC->MODER &= 0xFFF3FFFF;} // 设置SDA为输入方向,对于双向I/O需切换为输入
IO操作
//#define IIC_SCL PAout(8) //SCL
//#define IIC_SDA PCout(9) //SDA
//#define READ_SDA PCin(9) //输入SDA
#define SDA_OUT do{\
GPIO_InitType GPIO_InitStructure;\
GPIO_InitStruct(&GPIO_InitStructure);\
GPIO_InitStructure.Pin = GPIO_PIN_11;\
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;\
GPIO_InitPeripheral(GPIOB, &GPIO_InitStructure);}while(0);
#define SDA_IN do{\
GPIO_InitType GPIO_InitStructure;\
GPIO_InitStruct(&GPIO_InitStructure);\
GPIO_InitStructure.Pin = GPIO_PIN_11;\
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Input;\
GPIO_InitPeripheral(GPIOB, &GPIO_InitStructure);}while(0);
//产生IIC起始信号
#define READ_SDA GPIO_ReadInputDataBit(GPIOB,GPIO_PIN_11)
#define IIC_SDA(x) GPIO_WriteBit(GPIOB,GPIO_PIN_11,x)
#define IIC_SCL(x) GPIO_WriteBit(GPIOB,GPIO_PIN_10,x)
static void IIC_Init(void);
static void IIC_Start(void);
static void IIC_Stop(void);
static uint8_t IIC_Wait_Ack(void);
static void IIC_Ack(void);
static void IIC_NAck(void);
static void IIC_Send_Byte(uint8_t txd);
static uint8_t IIC_Read_Byte(unsigned char ack);
void delay_us(int x)
{
for(int i=0; i<x*60; i++);
}
//初始化IIC接口
void AT24CXX_Init(void)
{
#if HW_WARE_24CXX >0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
IIC_Init();//IIC初始化
}
//在AT24CXX指定地址读出一个数据
//ReadAddr:开始读数的地址
//返回值 :读到的数据
uint8_t AT24CXX_ReadOneByte(uint16_t ReadAddr)
{
#if HW_WARE_24CXX >1
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
uint8_t temp=0;
IIC_Start();
if(EE_TYPE>AT24C16)
{
IIC_Send_Byte(0XA0); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(ReadAddr>>8);//发送高地址
} else IIC_Send_Byte(0XA0+((ReadAddr/256)<<1)); //发送器件地址0XA0,写数据
IIC_Wait_Ack();
IIC_Send_Byte(ReadAddr%256); //发送低地址
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(0XA1); //进入接收模式
IIC_Wait_Ack();
temp=IIC_Read_Byte(0);
IIC_Stop();//产生一个停止条件
return temp;
}
//在AT24CXX指定地址写入一个数据
//WriteAddr :写入数据的目的地址
//DataToWrite:要写入的数据
void AT24CXX_WriteOneByte(uint16_t WriteAddr,uint8_t DataToWrite)
{
int page=0;
#if HW_WARE_24CXX >1
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
IIC_Start();
if(EE_TYPE>AT24C16)
{
IIC_Send_Byte(0XA0); //发送写命令10100000
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr>>8);//发送高地址
} else
{
page = WriteAddr/256;
#if HW_WARE_24CXX >0
printf("%s %s %d page = %02xH\r\n",__FILE__,__FUNCTION__,__LINE__,page);
#endif
IIC_Send_Byte(0XA0+((WriteAddr/256)<<1)); //发送器件地址0XA0,写数据
}
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr%256); //发送低地址
IIC_Wait_Ack();
IIC_Send_Byte(DataToWrite); //发送字节
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
delay_us(100);
}
//在AT24CXX里面的指定地址开始写入长度为Len的数据
//该函数用于写入16bit或者32bit的数据.
//WriteAddr :开始写入的地址
//DataToWrite:数据数组首地址
//Len :要写入数据的长度2,4
void AT24CXX_WriteLenByte(uint16_t WriteAddr,uint32_t DataToWrite,uint8_t Len)
{
#if HW_WARE_24CXX >0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
uint8_t t;
for(t=0; t<Len; t++)
{
AT24CXX_WriteOneByte(WriteAddr+t,(DataToWrite>>(8*t))&0xff);
}
}
//在AT24CXX里面的指定地址开始读出长度为Len的数据
//该函数用于读出16bit或者32bit的数据.
//ReadAddr :开始读出的地址
//返回值 :数据
//Len :要读出数据的长度2,4
uint32_t AT24CXX_ReadLenByte(uint16_t ReadAddr,uint8_t Len)
{
#if HW_WARE_24CXX >0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
uint8_t t;
uint32_t temp=0;
for(t=0; t<Len; t++)
{
temp<<=8;
temp+=AT24CXX_ReadOneByte(ReadAddr+Len-t-1);
}
return temp;
}
//检查AT24CXX是否正常
//这里用了24XX的最后一个地址(255)来存储标志字.
//如果用其他24C系列,这个地址要修改
//返回1:检测失败
//返回0:检测成功
uint8_t AT24CXX_Check(void)
{
#if HW_WARE_24CXX > 0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
uint8_t temp;
temp=AT24CXX_ReadOneByte(255);//避免每次开机都写AT24CXX
if(temp==0X55)return 0;
else//排除第一次初始化的情况
{
AT24CXX_WriteOneByte(255,0X55);
temp=AT24CXX_ReadOneByte(255);
if(temp==0X55)return 0;
}
return 1;
}
//在AT24CXX里面的指定地址开始读出指定个数的数据
//ReadAddr :开始读出的地址 对24c02为0~255
//pBuffer :数据数组首地址
//NumToRead:要读出数据的个数
void AT24CXX_Read(uint16_t ReadAddr,uint8_t *pBuffer,uint16_t NumToRead)
{
#if HW_WARE_24CXX >0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
while(NumToRead)
{
*pBuffer++=AT24CXX_ReadOneByte(ReadAddr++);
NumToRead--;
}
}
//在AT24CXX里面的指定地址开始写入指定个数的数据
//WriteAddr :开始写入的地址 对24c02为0~255
//pBuffer :数据数组首地址
//NumToWrite:要写入数据的个数
void AT24CXX_Write(uint16_t WriteAddr,uint8_t *pBuffer,uint16_t NumToWrite)
{
#if HW_WARE_24CXX >1
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
while(NumToWrite--)
{
AT24CXX_WriteOneByte(WriteAddr,*pBuffer);
WriteAddr++;
pBuffer++;
}
}
//在AT24CXX里面的指定地址开始写入指定个数的数据
//WriteAddr :开始写入的地址 对24c02为0~255
//pBuffer :数据数组首地址
//NumToWrite:要写入数据的个数
void AT24CXX_Erasure(uint16_t NumToWrite)
{
#if HW_WARE_24CXX >0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
uint16_t WriteAddr=0;
while(NumToWrite--)
{
AT24CXX_WriteOneByte(WriteAddr,0);
WriteAddr++;
}
}
/*软件模拟IIC*/
//IIC初始化
static void IIC_Init(void)
{
#if HW_WARE_24CXX >0
printf("%s %s %d\r\n",__FILE__,__FUNCTION__,__LINE__);
#endif
RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_GPIOB,ENABLE);
GPIO_InitType GPIO_InitStructure;
/* Initialize GPIO_InitStructure */
GPIO_InitStruct(&GPIO_InitStructure);
/* Configure USARTx Tx as alternate function push-pull */
GPIO_InitStructure.Pin = GPIO_PIN_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitPeripheral(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.Pin = GPIO_PIN_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitPeripheral(GPIOB, &GPIO_InitStructure);
GPIO_WriteBit(GPIOB,GPIO_PIN_10,Bit_SET);
GPIO_WriteBit(GPIOB,GPIO_PIN_11,Bit_SET);
}
static void IIC_Start(void)
{
SDA_OUT; //sda线输出
IIC_SDA(1);
IIC_SCL(1);
delay_us(4);
IIC_SDA(0);//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL(0);//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
static void IIC_Stop(void)
{
SDA_OUT;//sda线输出
IIC_SCL(0);
IIC_SDA(0);//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL(1);
delay_us(4);
IIC_SDA(1);//发送I2C总线结束信号
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
static uint8_t IIC_Wait_Ack(void)
{
uint8_t ucErrTime=0;
SDA_IN; //SDA设置为输入
IIC_SDA(1);
delay_us(1);
IIC_SCL(1);
delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL(0);//时钟输出0
return 0;
}
//产生ACK应答
static void IIC_Ack(void)
{
IIC_SCL(0);
SDA_OUT;
IIC_SDA(0);
delay_us(2);
IIC_SCL(1);
delay_us(2);
IIC_SCL(0);
}
//不产生ACK应答
static void IIC_NAck(void)
{
IIC_SCL(0);
SDA_OUT;
IIC_SDA(1);
delay_us(2);
IIC_SCL(1);
delay_us(2);
IIC_SCL(0);
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
static void IIC_Send_Byte(uint8_t txd)
{
uint8_t t;
SDA_OUT;
IIC_SCL(0);//拉低时钟开始数据传输
for(t=0; t<8; t++)
{
IIC_SDA((txd&0x80)>>7);
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL(1);
delay_us(2);
IIC_SCL(0);
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
static uint8_t IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN;//SDA设置为输入
for(i=0; i<8; i++ )
{
IIC_SCL(0);
delay_us(2);
IIC_SCL(1);
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
测试代码
AT24CXX_Init();
if(!AT24CXX_Check())
{
printf("AT24CXX_Check ok\r\n");
}
else
{
printf("AT24CXX_Check fail\r\n");
}
uint8_t buff[100];
uint8_t buff1[100];
for(int i=0; i<100; i++)
{
buff[i]=i;
}
AT24CXX_Write(0,buff,100);
AT24CXX_Read(0,buff1,100);
for(int i=0; i<100; i++)
{
printf("%02d ",buff1[i]);
}
printf("\r\n");
![Jmeter 压测工具使用手册[详细]](https://img-blog.csdnimg.cn/img_convert/64f729fcb7b6698b18f80c200a30b1ca.png)