Simulink基础【1】-弹簧-阻尼模型的常微分方程求解
- 0. Simulink模块是什么?能干什么?
- 1. 弹簧阻尼模型简介
- 1.1 受常力的弹簧阻尼模型
- 1.2 动力学方程
- 2. simulink模型构建
- 2.1 Simulink基础模块使用
- 2.2 结果可视化
- 后记
0. Simulink模块是什么?能干什么?
Simulink是Matlab软件的框图设计环境,可用于各种动态系统的建模、分析与仿真过程。如:导航制导、通讯、电子、机械、热力学等诸多领域。这些系统在数学角度描述上涉及连续、离散、非线性、时变等用解析方法难以求解的系统,因而采用Simulink进行建模与仿真是指导这些系统分析与设计的一种重要工具。
1. 弹簧阻尼模型简介
1.1 受常力的弹簧阻尼模型
对于一个弹簧阻尼系统,在受到恒力F作用,产生的位移为x,其模型如下图所示,
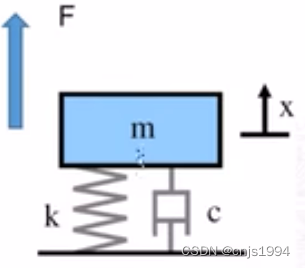
1.2 动力学方程
那么其动力学方程可表示为以下形式:
m
x
¨
+
c
x
˙
+
k
x
=
F
m\ddot{x}+c\dot{x}+kx=F
mx¨+cx˙+kx=F
经变换,可表示为如下形式:
x
¨
=
1
m
(
F
−
c
x
˙
−
k
x
)
\ddot{x}=\frac{1}{m}\left( F-c\dot{x}-kx \right)
x¨=m1(F−cx˙−kx)
2. simulink模型构建
2.1 Simulink基础模块使用
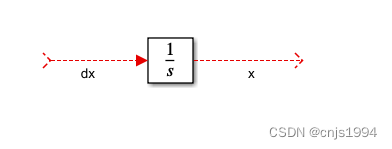
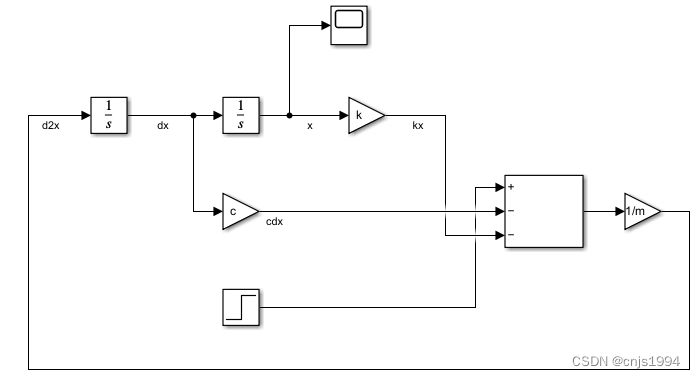
- 可以观察到,方程中主要包括了x的一阶、二阶导数和x,导数可以使用积分器(integrator)构造,单击界面,输入integrator,单击回车,即可产生该模块,然后对输入、输出进行简单标记。此处,输入为dx(x的一阶导数),输出为x。
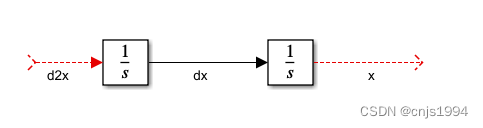
- 同理,可以构造二阶导数的积分器,并连线、注释
-
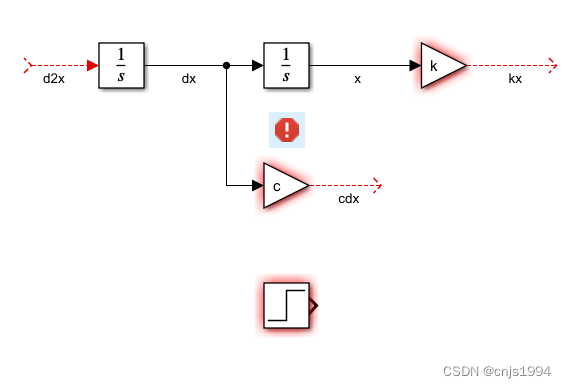
- 同理,可以构造出如下图所示的三个子项
F
−
c
x
˙
−
k
x
F-c\dot{x}-kx
F−cx˙−kx
- 最后,用Sum和增益器件(Gain)实现对求和后的项目除以m(乘以1/m),连接其他子回路,得到如下所示:
2.2 结果可视化
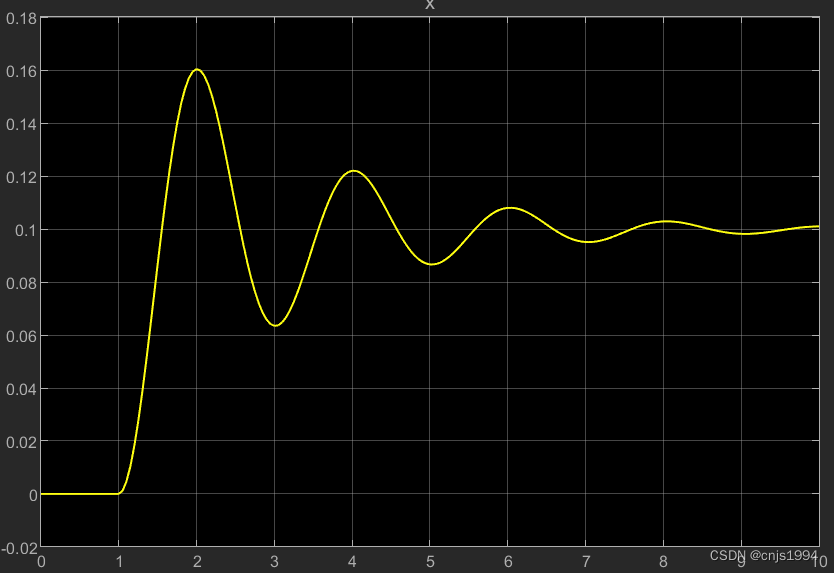
在matlab的命令行窗口设置F、k、c、m各个常参数的值
此外,可以通过simulink顶端的 建模-模型设置-步长,使得响应曲线更为平滑,仿真结果如下:
后记
这个系列将持续更新作者对simulink这个模块的学习和心得,欢迎交流与讨论!


![[1.2.0新功能系列:二] Apache Doris 1.2.0 JDBC外表 及 Mutil Catalog](https://img-blog.csdnimg.cn/img_convert/89057697ab6d9a07f92e99a8dfad955b.png)






![[附源码]Node.js计算机毕业设计道岔故障监测系统设计Express](https://img-blog.csdnimg.cn/0747ad7086604d8699bf621eea445418.png)
