目录
一、问题描述:
二、解决方法:
2.1 SDF模型:
2.2 URDF模型:
2.3 测试添加模型
三、通过Python程序在Gazebo中添加模型
一、问题描述:
在使用ros做仿真实验时,有时会需要在空间中添加一个模型文件,使之悬浮在空间中的某个坐标,但是往往会因为重力原因,模型会直接掉落在地上
二、解决方法:
修改模型文件,禁用重力标签
2.1 SDF模型:
找到你的模型文件目录,如果你的模型文件是.sdf格式,找到模型代码的重力标签<gravity>部分
<gravity>1</gravity>将其中的数字1改为数字0,达到禁用重力的目的
<gravity>0</gravity> <!-- 禁用重力 -->这将阻止Gazebo对该模型施加重力,使其悬浮在半空中。其他的惯性(inertial)和碰撞(collision)等属性保持不变,只需修改<gravity>标签即可。保存文件后,重新加载模型到Gazebo中,它将悬浮在半空中而不会受到重力的影响。
保存文件后重新在Gazebo中添加模型,就可以悬浮在半空中了;
2.2 URDF模型:
找到你的模型文件目录,如果你的模型文件是.urdf格式,要让模型悬浮在半空中而不受重力影响,你可以将模型的惯性属性适当设置为零。
在URDF文件中,惯性属性可以在每个链接(link)的<inertial>元素中设置。确保在你想要悬浮的链接中将惯性属性设置为合适的零值
一个例子如下:
<link name="floating_link">
<inertial>
<mass value="0.0"/>
<!-- Set all inertia values to zero -->
<inertia ixx="0.0" ixy="0.0" ixz="0.0" iyy="0.0" iyz="0.0" izz="0.0"/>
</inertial>
<!-- Other visual, collision, and other elements -->
</link>
通过将mass值设置为0,以及设置inertia的所有值为0,你可以让该链接悬浮在半空中,并且不受重力影响。需要注意的是,如果该链接是连接到其他链接的,你可能还需要检查其父链接或子链接的属性,确保整个模型都符合你的要求。
同样地,你也可以根据需要进行一些调整,以达到适合你模型的平衡状态。完成修改后,重新加载URDF文件到ROS和Gazebo中,你的模型应该会悬浮在半空中而不会受到重力影响。
2.3 测试添加模型
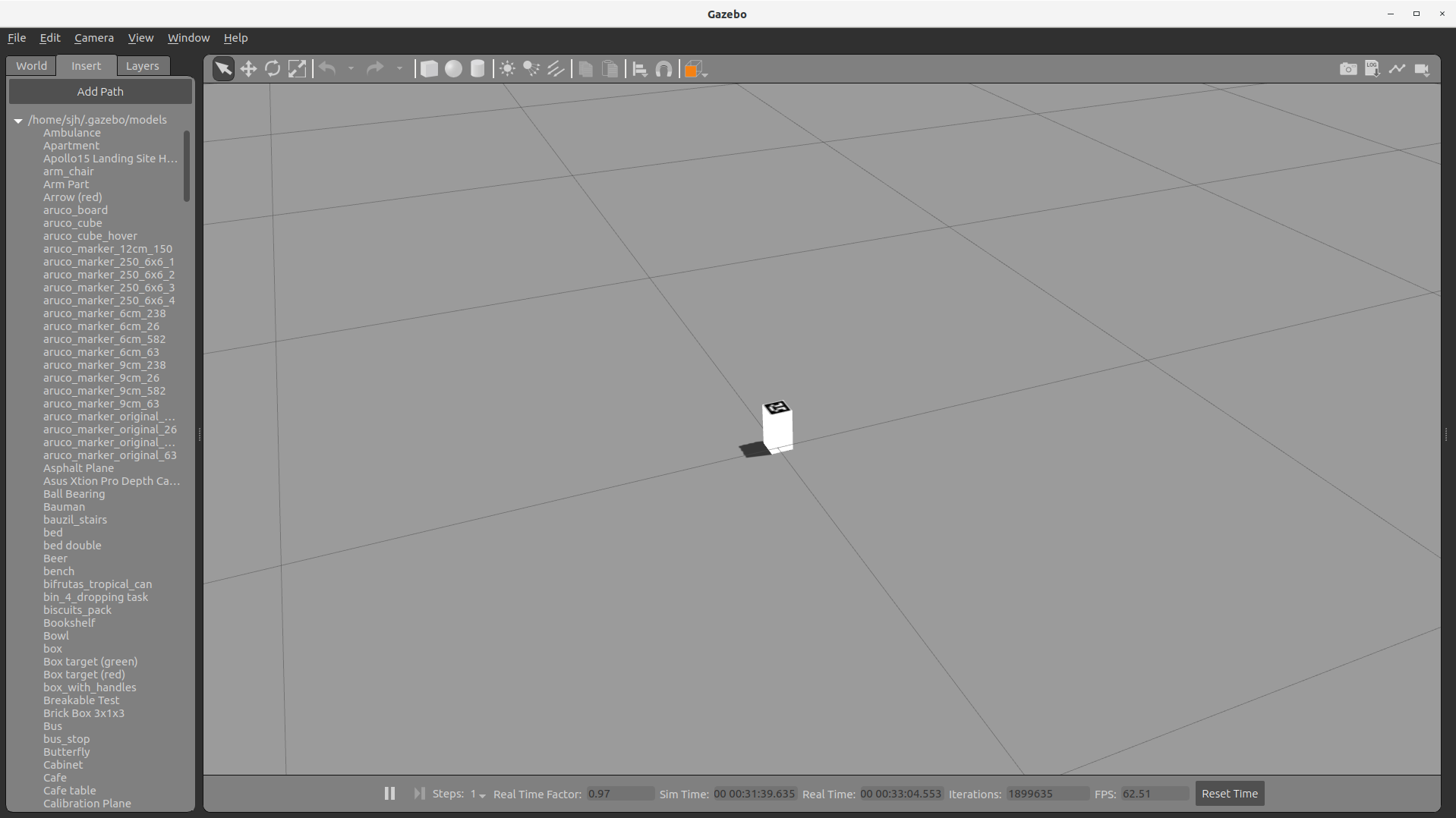
使用程序在坐标(1,1,1)处添加模型,可以看到能够悬浮在此坐标系下


三、通过Python程序在Gazebo中添加模型
这里需要注意的一点是,在将模型文件的重力标签禁用之后,模型处于零重力状态,想象一下宇航员在太空空间站中的状态,以及结合中学物理知识,只要有一个初速度,他就会进行匀速直线运动,且很难停下。
所以如果用鼠标直接添加模型的话,大概率是有一个向上的初速度的,此时就建议使用额外的脚本命令来添加模型,这里我使用的是Python程序
# -*- coding: utf-8 -*-
#!/usr/bin/env python
import os
import rospy
from gazebo_msgs.msg import ModelState
from gazebo_msgs.srv import DeleteModel, SpawnModel
from std_msgs.msg import Header
from geometry_msgs.msg import Pose, Point
# 初始化ROS节点
rospy.init_node('spawn_aruco_cubo_hover', anonymous=True)
# 定义生成模型的函数
def spawn_aruco_cubo_hover():
model_name = "aruco_cubo_hover"
model_path = "/home/sjh/project/Tiago_ws/src/pal_gazebo_worlds/models/aruco_cube_hover/aruco_cube_hover.sdf"
initial_pose = Pose(position=Point(x=1, y=1, z=1))
# 从文件加载模型
with open(model_path, "r") as f:
model_xml = f.read()
# 调用Gazebo的SpawnModel服务
spawn_model = rospy.ServiceProxy('/gazebo/spawn_sdf_model', SpawnModel)
resp_sdf = spawn_model(model_name, model_xml, "", initial_pose, "world")
if resp_sdf.success:
rospy.loginfo("模型 '{}' 生成成功。".format(model_name))
else:
rospy.logerr("模型 '{}' 生成失败。".format(model_name))
# 调用生成模型的函数
if __name__ == '__main__':
try:
spawn_aruco_cubo_hover()
except rospy.ROSInterruptException:
pass
在使用程序时,注意将spawn_aruco_cubo_hover函数中的模型路径和指定坐标修改为你需要的
def spawn_aruco_cubo_hover():
model_name = "你的模型的名称"
model_path = "你的模型的路径"
initial_pose = Pose(position=Point(x=1, y=1, z=1)) # xyz值就是指定坐标位置