周日业余时间太无聊,又不喜欢玩游戏,大家的兴趣爱好都是啥?我觉得敲代码也是一种兴趣爱好。正巧手边有一块儿0.96寸的OLED显示屏,一直在吃灰,何不把玩一把?于是说干就干,最后在我的imax6ul的linux开发板上使用spi用户态驱动成功点亮。这里总结下过程,分享给有需要的小伙伴。
前言
本文主要介绍在imax6ul-mini开发板上如何驱动OLED显示屏外设,总结下过程。由于板子默认是spi接口的,这里先玩一把spi接口的驱动,后续计划改为i2c的接口驱动再玩一次。
我的环境资源:
Linux内核:linux-4.1.15
所用开发板:正点原子imax6ul-mini
所用OLED 屏幕:中景园电子0.96 寸OLED 显示屏12864液晶屏模块(支持spi和i2c接口)
所用OLED 驱动芯片:SH1106
完整源码下载地址:
https://download.csdn.net/download/qq8864/88117562
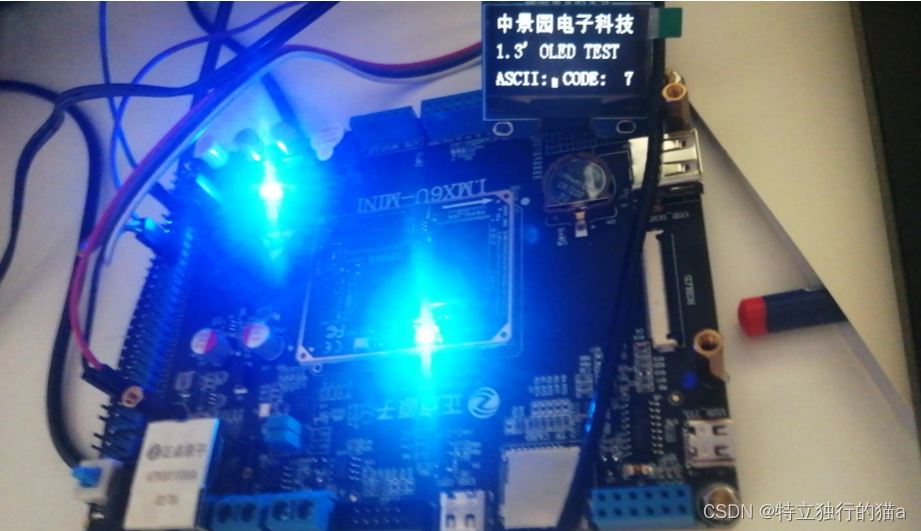
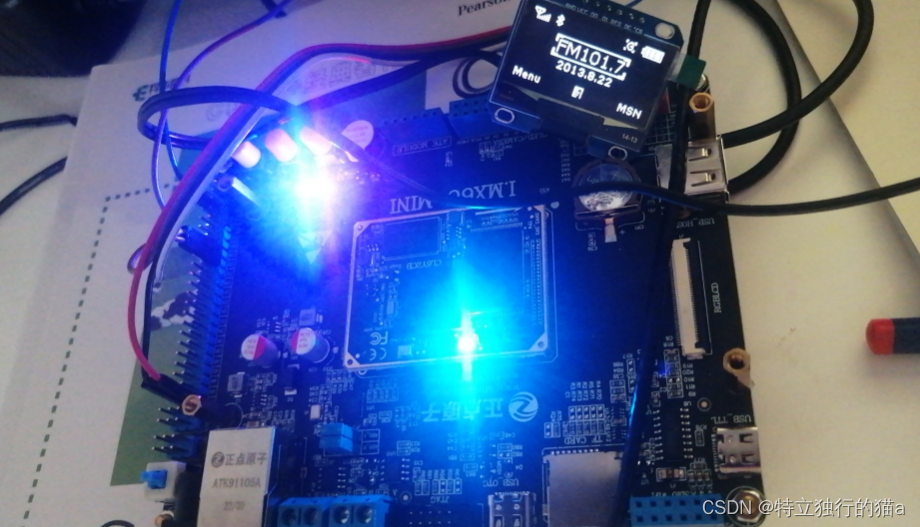
效果截图:
实现方案
想要驱动中景园电子的这款OLED显示屏,方案有很多。这个模块同时支持spi和i2c接口,所以肯定需要使用linux的spi或i2c驱动。
以 spi驱动为例,在嵌入式Linux下,实现SPI驱动的方式有多种。以下是其中几种常见的方式:
1. 使用GPIO控制模拟SPI:使用GPIO接口控制SPI总线的时序和数据传输,需要自行编写驱动程序来实现SPI通信。
2. 使用SPI框架驱动:Linux内核提供了SPI框架驱动,可以通过注册SPI设备和驱动来实现SPI通信。需要编写SPI设备和驱动的代码。
3. 使用spidev驱动:spidev是Linux内核提供的一个通用的SPI设备驱动接口,可以简化SPI设备的使用。它提供了用户空间的API,通过打开/dev/spidev设备文件,使用ioctl函数进行SPI通信。使用spidev驱动可以方便地在用户空间进行SPI通信,而无需编写内核驱动程序。
这里要介绍的实现方式是使用spidev驱动驱动。原因是因为操作OLED屏幕,需要自定义一系列的操作接口如oled_dispString() ,oled_clear()等。虽然使用方式2是较为流行的一种,但是需要注册到字符设备框架下,提供文件系统的操作接口的方式用,用起来稍显麻烦,还需再次封装一下。
spidev驱动是一个通用的SPI设备驱动接口,它允许用户空间通过简单的API与SPI设备进行通信。用户可以通过打开/dev/spidev设备文件,使用ioctl函数进行SPI通信。spidev驱动提供了一些常用的操作函数,如配置SPI模式、设置时钟频率、传输数据等。使用spidev驱动可以方便地在用户空间进行SPI通信,而无需编写内核驱动程序。
与传统的SPI驱动相比,spidev驱动的优点是简单易用,无需编写内核驱动程序,只需在用户空间使用ioctl函数进行SPI通信。但是,spidev驱动也有一些限制,例如无法支持中断和DMA传输等高级功能。如果需要使用这些高级功能,可能需要编写自定义的SPI驱动程序。
实现过程
首先需要确认内核配置开启了spidev驱动。参见博文:嵌入式linux通用spi驱动之spidev使用总结_特立独行的猫a的博客-CSDN博客
修改设备树
修改imx6ull-14x14-evk.dts文件,该设备树文件位于内核源码 linux/arch/arm/boot/dts/目录下。
&ecspi3 {
fsl,spi-num-chipselects = <2>;/*cs管脚数配置*/
cs-gpios = <0>,<&gpio1 20 GPIO_ACTIVE_LOW>;/*cs管脚配置*/
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi3>;
status = "okay";/* status属性值为"okay" 表示该节点使能*/
spidev: icm20608@0 {
compatible = "alientek,icm20608";
spi-max-frequency = <8000000>;
reg = <0>;/*spi设备是没有设备地址的, 这里是指使用spi控制器的cs-gpios里的第几个片选io */
};
oled: oledsh1106@1 {
compatible = "yang,oledsh1106";/*重要,会匹配spidev.c中指定的compatible*/
spi-cpol;/*配置spi信号模式*/
spi-cpha;
spi-max-frequency = < 8000000 >;/* 指定spi设备的最大工作时钟 */
reg = <1>;
};
};以上需要注意的是:如果该spi接口下挂载有多个从设备,需要设置fsl,spi-num-chipselects = <2>;默认该值为1。还有需要注意的地方是,cs-gpios 片选信号需要配置对应的个数。以上的为配置了两路片选GPIO管脚,第一个默认的,第二个是指定的。如果仅有一个从设备,可以配置cs-gpio就行了。注意cs-gpio和cs-gpios的区别,带s的标识可以有多个。
修改spidev驱动
默认的spidev.c驱动文件中,是没有匹配你添加的设备的。因此需要修改spidev.c源码,增加compatible匹配。spidev.c源码文件位于linux/drivers/spi/spidev.c
/* The main reason to have this class is to make mdev/udev create the
* /dev/spidevB.C character device nodes exposing our userspace API.
* It also simplifies memory management.
*/
static struct class *spidev_class;
//#ifdef CONFIG_OF
static const struct of_device_id spidev_dt_ids[] = {
{ .compatible = "rohm,dh2228fv" },
{ .compatible = "yang,oledsh1106" },
{},
};
MODULE_DEVICE_TABLE(of, spidev_dt_ids);
//#endif编译内核和设备树
#加载环境
source /opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
#编译内核
make zImage -j16
#编译指定的设备树
make imx6ull-14x14-nand-4.3-480x272-c.dtb为了方便调试,更新内核和设备树文件,建议最好使用sd卡启动,这样把sd卡抠出来插入电路上,可以很方便的更新内核和设备树文件。
设备树查看
内核和设备树更新后,启动开发板。可以看下spidev驱动是否生效了。
查看设备树是否有新添加的节点:

更新设备树到板子上后,能够查看到如下生成spi设备节点(spidev2.1):
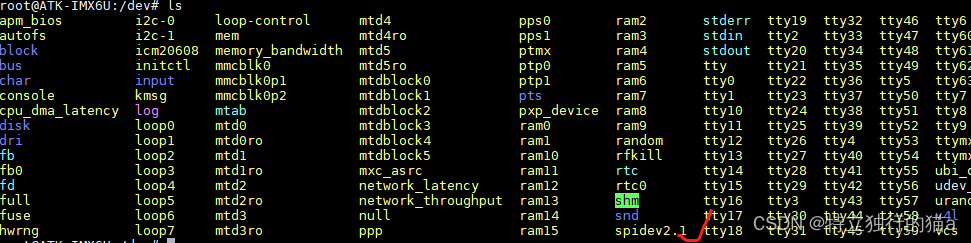
经过以上过程,已经成功了一大半啦。或者可以用工具测试下spi驱动接口。
OELD驱动实现
在以上spidev总线驱动就绪的基础上,OELD驱动实现就简单啦。
先看下oled模块板子的接线:


DO对应SPI接口的CLK, D1(spi)数据线对应SPI接口了MOSI。
注意:由于这个屏幕显示不存在读取的情况,SPI的MISO口并未使用,且莫把线接错了。(比如我一开始就把MISO接到DC上啦,这是错的。)。DC口是啥?这是该模块的数据和命令选择管脚,分为发送指令和发送数据两周类型的操作。当发送指令时,DC口需要输出高电平,当发送数据时,DC口需要发送低电平。
SPI(Serial Peripheral Interface)是一种串行外设接口协议,用于在微控制器或其他设备之间进行通信。SPI使用四根线进行通信:SCLK(时钟线)、MOSI(主设备输出从设备输入线)、MISO(主设备输入从设备输出线)和SS(片选线)。
MOSI(Master Out Slave In)是主设备向从设备发送数据的线路,而MISO(Master In Slave Out)是从设备向主设备发送数据的线路。这两条线的功能是相反的,主设备通过MOSI将数据发送给从设备,从设备通过MISO将数据发送给主设备。
SPI协议中的数据传输是双向的,主设备和从设备可以同时发送和接收数据。因此,如果只需要进行写操作,理论上可以只使用MOSI线,而将MISO线悬空不连接。但在实际应用中,为了保持SPI接口的完整性和稳定性,通常还是会将MISO线连接起来,即使在写操作时不使用。
连接MISO线的好处是可以实现双向通信的灵活性,以备将来可能需要读取从设备的数据。另外,MISO线上的数据也可以用于进行错误检测和校验,以提高数据传输的可靠性。
驱动实现
spidev驱动操作
使用spidev驱动的操作方法,大致过程操作如下:
1. 打开SPI设备:
int spi_fd;
spi_fd = open("/dev/spidev0.0", O_RDWR);
if (spi_fd < 0) {
perror("Failed to open SPI device");
return -1;
}2. 设置SPI模式、速度和位数:
int mode = SPI_MODE_0;
int speed = 1000000;
int bits_per_word = 8;
if (ioctl(spi_fd, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
return -1;
}
if (ioctl(spi_fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed) < 0) {
perror("Failed to set SPI speed");
return -1;
}
if (ioctl(spi_fd, SPI_IOC_WR_BITS_PER_WORD, &bits_per_word) < 0) {
perror("Failed to set SPI bits per word");
return -1;
}3. 创建spi_ioc_message结构体,并设置相关字段:
struct spi_ioc_transfer transfer;
memset(&transfer, 0, sizeof(struct spi_ioc_transfer));
transfer.tx_buf = (unsigned long)tx_buffer; // 发送缓冲区
transfer.rx_buf = (unsigned long)rx_buffer; // 接收缓冲区
transfer.len = length; // 数据长度
transfer.speed_hz = speed; // 传输速度
transfer.bits_per_word = bits_per_word; // 每个字的位数
transfer.cs_change = 1; // 控制片选信号的行为其中,transfer.cs_change为1表示每次传输前会拉低片选信号,传输完成后会拉高片选信号。
4. 发送命令和数据:
if (ioctl(spi_fd, SPI_IOC_MESSAGE(1), &transfer) < 0) {
perror("Failed to send SPI message");
return -1;
}其中,SPI_IOC_MESSAGE(1)表示发送1个spi_ioc_transfer结构体。
OELD驱动接口封装
#include <stdint.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <getopt.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/types.h>
#include <linux/spi/spidev.h>
#include "oledfont.h"
#include "bmp.h"
#include "oled.h"
#define ARRAY_SIZE(a) (sizeof(a) / sizeof((a)[0]))
static void pabort(const char *s)
{
perror(s);
abort();
}
static const char *device = "/dev/spidev2.1";
static int32_t spi_fd;
static uint32_t spi_mode;
static uint8_t spi_bits = 8;
static uint32_t spi_speed = 800000;
static uint16_t spi_delay;
static int verbose;
static void hex_dump(const void *src, size_t length, size_t line_size, char *prefix)
{
int i = 0;
const unsigned char *address = src;
const unsigned char *line = address;
unsigned char c;
printf("%s | ", prefix);
while (length-- > 0) {
printf("%02X ", *address++);
if (!(++i % line_size) || (length == 0 && i % line_size)) {
if (length == 0) {
while (i++ % line_size)
printf("__ ");
}
printf(" | "); /* right close */
while (line < address) {
c = *line++;
printf("%c", (c < 33 || c == 255) ? 0x2E : c);
}
printf("\n");
if (length > 0)
printf("%s | ", prefix);
}
}
}
/*
* Unescape - process hexadecimal escape character
* converts shell input "\x23" -> 0x23
*/
static int unescape(char *_dst, char *_src, size_t len)
{
int ret = 0;
char *src = _src;
char *dst = _dst;
unsigned int ch;
while (*src) {
if (*src == '\\' && *(src+1) == 'x') {
sscanf(src + 2, "%2x", &ch);
src += 4;
*dst++ = (unsigned char)ch;
} else {
*dst++ = *src++;
}
ret++;
}
return ret;
}
static int transfer(int fd, uint8_t const *tx, uint8_t const *rx, size_t len)
{
int ret;
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = spi_delay,
.speed_hz = spi_speed,
.bits_per_word = spi_bits,
.cs_change = 0,
};
if (spi_mode & SPI_TX_QUAD)
tr.tx_nbits = 4;
else if (spi_mode & SPI_TX_DUAL)
tr.tx_nbits = 2;
if (spi_mode & SPI_RX_QUAD)
tr.rx_nbits = 4;
else if (spi_mode & SPI_RX_DUAL)
tr.rx_nbits = 2;
if (!(spi_mode & SPI_LOOP)) {
if (spi_mode & (SPI_TX_QUAD | SPI_TX_DUAL))
tr.rx_buf = 0;
else if (spi_mode & (SPI_RX_QUAD | SPI_RX_DUAL))
tr.tx_buf = 0;
}
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1)
pabort("can't send spi message");
if (verbose){
hex_dump(tx, len, 32, "TX");
hex_dump(rx, len, 32, "RX");
}
return ret;
}
//向SSD1106写入一个字节。
//dat:要写入的数据/命令
//cmd:数据/命令标志 0,表示命令;1,表示数据;
void OLED_WR_Byte(u8 dat,u8 cmd)
{
u8 tx[2];
u8 rx[2];
tx[0] = dat;
if(cmd)
{
system("echo 1 > /sys/class/gpio/gpio1/value");
transfer(spi_fd,tx,rx,1);
}
else
{
system("echo 0 > /sys/class/gpio/gpio1/value");
transfer(spi_fd,tx,rx,1);
}
}
//初始化SSD1306
void OLED_Init(void)
{
//OLED_RST_Set();
usleep(100000);
//OLED_RST_Clr();
usleep(100000);
//OLED_RST_Set();
OLED_WR_Byte(0xAE,OLED_CMD);//--turn off oled panel
OLED_WR_Byte(0x02,OLED_CMD);//---set low column address
OLED_WR_Byte(0x10,OLED_CMD);//---set high column address
OLED_WR_Byte(0x40,OLED_CMD);//--set start line address Set Mapping RAM Display Start Line (0x00~0x3F)
OLED_WR_Byte(0x81,OLED_CMD);//--set contrast control register
OLED_WR_Byte(0xCF,OLED_CMD); // Set SEG Output Current Brightness
OLED_WR_Byte(0xA1,OLED_CMD);//--Set SEG/Column Mapping 0xa0左右反置 0xa1正常
OLED_WR_Byte(0xC8,OLED_CMD);//Set COM/Row Scan Direction 0xc0上下反置 0xc8正常
OLED_WR_Byte(0xA6,OLED_CMD);//--set normal display
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3f,OLED_CMD);//--1/64 duty
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset Shift Mapping RAM Counter (0x00~0x3F)
OLED_WR_Byte(0x00,OLED_CMD);//-not offset
OLED_WR_Byte(0xd5,OLED_CMD);//--set display clock divide ratio/oscillator frequency
OLED_WR_Byte(0x80,OLED_CMD);//--set divide ratio, Set Clock as 100 Frames/Sec
OLED_WR_Byte(0xD9,OLED_CMD);//--set pre-charge period
OLED_WR_Byte(0xF1,OLED_CMD);//Set Pre-Charge as 15 Clocks & Discharge as 1 Clock
OLED_WR_Byte(0xDA,OLED_CMD);//--set com pins hardware configuration
OLED_WR_Byte(0x12,OLED_CMD);
OLED_WR_Byte(0xDB,OLED_CMD);//--set vcomh
OLED_WR_Byte(0x40,OLED_CMD);//Set VCOM Deselect Level
OLED_WR_Byte(0x20,OLED_CMD);//-Set Page Addressing Mode (0x00/0x01/0x02)
OLED_WR_Byte(0x02,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);//--set Charge Pump enable/disable
OLED_WR_Byte(0x14,OLED_CMD);//--set(0x10) disable
OLED_WR_Byte(0xA4,OLED_CMD);// Disable Entire Display On (0xa4/0xa5)
OLED_WR_Byte(0xA6,OLED_CMD);// Disable Inverse Display On (0xa6/a7)
OLED_WR_Byte(0xAF,OLED_CMD);//--turn on oled panel
OLED_WR_Byte(0xAF,OLED_CMD); /*display ON*/
OLED_Clear();
OLED_Set_Pos(0,0);
}
void OLED_Set_Pos(unsigned char x, unsigned char y)
{
OLED_WR_Byte(0xb0+y,OLED_CMD);
OLED_WR_Byte(((x&0xf0)>>4)|0x10,OLED_CMD);
OLED_WR_Byte((x&0x0f)|0x01,OLED_CMD);
}
//开启OLED显示
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
//关闭OLED显示
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
//清屏函数,清完屏,整个屏幕是黑色的!和没点亮一样!!!
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //设置页地址(0~7)
OLED_WR_Byte (0x02,OLED_CMD); //设置显示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //设置显示位置—列高地址
for(n=0;n<128;n++)OLED_WR_Byte(0,OLED_DATA);
} //更新显示
}
//在指定位置显示一个字符,包括部分字符
//x:0~127
//y:0~63
//mode:0,反白显示;1,正常显示
//size:选择字体 16/12
void OLED_ShowChar(u8 x,u8 y,u8 chr)
{
unsigned char c=0,i=0;
c=chr-' ';//得到偏移后的值
if(x>Max_Column-1){x=0;y=y+2;}
if(SIZE ==16)
{
OLED_Set_Pos(x,y);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i],OLED_DATA);
OLED_Set_Pos(x,y+1);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i+8],OLED_DATA);
}
else {
OLED_Set_Pos(x,y+1);
for(i=0;i<6;i++)
OLED_WR_Byte(F6x8[c][i],OLED_DATA);
}
}
//m^n函数
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
//显示2个数字
//x,y :起点坐标
//len :数字的位数
//size:字体大小
//mode:模式 0,填充模式;1,叠加模式
//num:数值(0~4294967295);
void OLED_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 size)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t<len;t++)
{
temp=(num/oled_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size/2)*t,y,' ');
continue;
}else enshow=1;
}
OLED_ShowChar(x+(size/2)*t,y,temp+'0');
}
}
//显示一个字符号串
void OLED_ShowString(u8 x,u8 y,u8 *chr)
{
unsigned char j=0;
while (chr[j]!='\0')
{ OLED_ShowChar(x,y,chr[j]);
x+=8;
if(x>120){x=0;y+=2;}
j++;
}
}
//显示汉字
void OLED_ShowCHinese(u8 x,u8 y,u8 no)
{
u8 t,adder=0;
OLED_Set_Pos(x,y);
for(t=0;t<16;t++)
{
OLED_WR_Byte(Hzk[2*no][t],OLED_DATA);
adder+=1;
}
OLED_Set_Pos(x,y+1);
for(t=0;t<16;t++)
{
OLED_WR_Byte(Hzk[2*no+1][t],OLED_DATA);
adder+=1;
}
}
/***********功能描述:显示显示BMP图片128×64起始点坐标(x,y),x的范围0~127,y为页的范围0~7*****************/
void OLED_DrawBMP(unsigned char x0, unsigned char y0,unsigned char x1, unsigned char y1,unsigned char BMP[])
{
unsigned int j=0;
unsigned char x,y;
if(y1%8==0) y=y1/8;
else y=y1/8+1;
for(y=y0;y<y1;y++)
{
OLED_Set_Pos(x0,y);
for(x=x0;x<x1;x++)
{
OLED_WR_Byte(BMP[j++],OLED_DATA);
}
}
}
int spidev_init()
{
int ret = 0;
spi_mode = SPI_MODE_0;
verbose = 0;
spi_fd = open(device, O_RDWR);
if (spi_fd < 0)
pabort("can't open device");
/*
* spi mode
*/
ret = ioctl(spi_fd, SPI_IOC_WR_MODE32, &spi_mode);
if (ret == -1)
pabort("can't set spi mode");
ret = ioctl(spi_fd, SPI_IOC_RD_MODE32, &spi_mode);
if (ret == -1)
pabort("can't get spi mode");
/*
* bits per word
*/
ret = ioctl(spi_fd, SPI_IOC_WR_BITS_PER_WORD, &spi_bits);
if (ret == -1)
pabort("can't set bits per word");
ret = ioctl(spi_fd, SPI_IOC_RD_BITS_PER_WORD, &spi_bits);
if (ret == -1)
pabort("can't get bits per word");
/*
* max speed hz
*/
ret = ioctl(spi_fd, SPI_IOC_WR_MAX_SPEED_HZ, &spi_speed);
if (ret == -1)
pabort("can't set max speed hz");
ret = ioctl(spi_fd, SPI_IOC_RD_MAX_SPEED_HZ, &spi_speed);
if (ret == -1)
pabort("can't get max speed hz");
printf("spi mode: 0x%x\n", spi_mode);
printf("bits per word: %d\n", spi_bits);
printf("max speed: %d Hz (%d KHz)\n", spi_speed, spi_speed/1000);
return ret;
}测试使用
int main(int argc, char *argv[])
{
//导出DC口,这里使用的是GPIO1管脚,作为DC口使用(命令数据选择管脚)
system("echo 1 > /sys/class/gpio/export");
system("echo out >/sys/class/gpio/gpio1/direction");
spidev_init();
OLED_Init();
OLED_ShowString(0,0,"hello world");
return 0;
}注意,这里使用了一种偷懒的做法,直接导出了一个GPIO1管脚使用,通过system调用的方式先导出IO口。在OLED的发送接口里,也通过了system命令调用的方式(相当低效且费资源,正式用的话肯定不这么做,这里仅是为了测试)。
gpiochipxx:当前SoC 所包含的GPIO 控制器,I.MX6UL/I.MX6ULL 一共包含了5 个GPIO控制器,分别为GPIO1、GPIO2、GPIO3、GPIO4、GPIO5,在这里分别对应gpiochip0、gpiochip32、gpiochip64、gpiochip96、gpiochip128 这5 个文件夹,每一个gpiochipxx 文件夹用来管理一组GPIO。

例如要导出GPIO1_1,可以通过这种方式:
echo 1 > /sys/class/gpio/export对于给定的一个GPIO 引脚,如何计算它在sysfs 中对应的编号呢?其实非常简单,譬如给定一个GPIO引脚为GPIO4_IO16,那它对应的编号是多少呢?首先我们要确定GPIO4 对应于gpiochip96,该组GPIO 引脚的最小编号是96(对应于GPIO4_IO0),所以GPIO4_IO16 对应的编号自然是96 + 16 = 112;同理GPIO3_IO20 对应的编号是64 + 20 = 84。
//向SSD1106写入一个字节。
//dat:要写入的数据/命令
//cmd:数据/命令标志 0,表示命令;1,表示数据;
void OLED_WR_Byte(u8 dat,u8 cmd)
{
u8 tx[2];
u8 rx[2];
tx[0] = dat;
if(cmd)
{
system("echo 1 > /sys/class/gpio/gpio1/value");
transfer(spi_fd,tx,rx,1);
}
else
{
system("echo 0 > /sys/class/gpio/gpio1/value");
transfer(spi_fd,tx,rx,1);
}
}使用 echo 命令通过文件系统导出和控制 GPIO 口是一种简单易用的方式,但在性能要求较高的场景下可能不够高效。可以考虑使用 GPIO 库、设备驱动程序或用户空间库和工具来提高效率,如可以使用libgpiod库的方式。
libgpiod库简介
libgpiod是用于与linux GPIO交互的C库和工具,从 linux 4.8 后,官方不推荐使用 GPIO sysfs 接口,libgpiod库封装了 ioctl 调用和简单的API接口。Libgpiod是一种字符设备接口,GPIO访问控制是通过操作字符设备文件(比如/dev/gpiodchip0)实现的。
与sysfs方式相比,libgpiod可以保证所有分配的资源,在关闭文件描述符后得到完全释放,并且拥有sysfs方式接口中不存在的功能(如时间轮询,一次设置/读取多个gpio值)。此外libgpiod还包含一组命令行工具,允许用户使用脚本对gpio进行个性化操作。
详细介绍:libgpiod/libgpiod.git - C library and tools for interacting with the linux GPIO character device
libgpiod库的简单使用:
#include <gpiod.h>
#include <stdio.h>
int main() {
struct gpiod_chip *chip;
struct gpiod_line *line;
int value;
// 打开 GPIO 控制器
chip = gpiod_chip_open("/dev/gpiochip0");
if (!chip) {
perror("Failed to open GPIO chip");
return -1;
}
// 获取 GPIO 口
line = gpiod_chip_get_line(chip, 17);
if (!line) {
perror("Failed to get GPIO line");
gpiod_chip_close(chip);
return -1;
}
// 设置 GPIO 口为输出模式
int ret = gpiod_line_request_output(line, "example", 0);
if (ret < 0) {
perror("Failed to set GPIO line as output");
gpiod_line_release(line);
gpiod_chip_close(chip);
return -1;
}
// 控制 GPIO 输出高低电平
ret = gpiod_line_set_value(line, 1);
if (ret < 0) {
perror("Failed to set GPIO line value");
gpiod_line_release(line);
gpiod_chip_close(chip);
return -1;
}
// 读取 GPIO 输入值
value = gpiod_line_get_value(line);
printf("GPIO value: %d\n", value);
// 释放资源
gpiod_line_release(line);
gpiod_chip_close(chip);
return 0;
}上述示例中,首先通过 gpiod_chip_open 打开指定的 GPIO 控制器(例如 /dev/gpiochip0 ),然后使用 gpiod_chip_get_line 获取指定的 GPIO 口(例如 17 号口)。接下来,我们使用 gpiod_line_request_output 将 GPIO 口设置为输出模式,并使用 gpiod_line_set_value 控制输出高低电平。最后,我们使用 gpiod_line_get_value 读取 GPIO 输入值,并使用 gpiod_line_release 和 gpiod_chip_close 释放资源。 需要注意的是,使用 libgpiod 需要安装相应的库文件和头文件,并在编译时链接 libgpiod 库。
需要注意的是,libgpiod 要求 Linux 内核版本至少为 4.8,因为它依赖于内核的 GPIO 字符设备接口(gpiochip)。在 4.8 版本之前的内核中,该接口可能不存在或不完整,因此无法使用 libgpiod 库。可以使用如下的方式:
int main(int argc, char *argv[])
{
//导出DC口,这里使用的是GPIO1管脚,作为DC口使用(命令数据选择管脚)
//system("echo 1 > /sys/class/gpio/export");
//system("echo out >/sys/class/gpio/gpio1/direction");
dc_p = fopen("/sys/class/gpio/export","w");
fprintf(dc_p,"%d",1);
fclose(dc_p);
dc_p = fopen("/sys/class/gpio/gpio1/direction","w");
fprintf(dc_p,"out");
fclose(dc_p);
dc_p = fopen("/sys/class/gpio/gpio1/value","w");
fprintf(dc_p,"1");
fflush(dc_p);
spidev_init();
OLED_Init();
OLED_ShowString(0,0,"hello world");
return 0;
}//向SSD1106写入一个字节。
//dat:要写入的数据/命令
//cmd:数据/命令标志 0,表示命令;1,表示数据;
void OLED_WR_Byte(u8 dat,u8 cmd)
{
u8 tx[2];
u8 rx[2];
tx[0] = dat;
if(cmd)
{
//system("echo 1 > /sys/class/gpio/gpio1/value");
fprintf(dc_p,"1");
fflush(dc_p);
transfer(spi_fd,tx,rx,1);
}
else
{
//system("echo 0 > /sys/class/gpio/gpio1/value");
fprintf(dc_p,"0");
fflush(dc_p);
transfer(spi_fd,tx,rx,1);
}
} 也可以使用open系统调用函数。究竟哪个更高效?需要考虑到多个因素,包括数据量、缓冲区大小、系统调用次数等。以上推荐使用fopen和fwrite.
fopen 和 open 是 Linux 中用于打开文件的两个函数,它们之间有一些区别。
1. fopen 是 C 标准库中的函数,用于以流的形式打开文件。它返回一个 FILE* 类型的指针,可以使用标准库函数(如 fread 、 fwrite 、 fprintf 等)对文件进行读写操作。 fopen 函数提供了一些方便的功能,如自动缓冲、格式化输入输出等。但是,由于它是标准库函数,因此在处理大量数据时可能会有性能上的损失。
2. open 是系统调用函数,用于以文件描述符的形式打开文件。它返回一个整数类型的文件描述符,可以使用系统调用函数(如 read 、 write 、 ioctl 等)对文件进行读写操作。 open 函数是操作系统提供的原始接口,直接与内核交互,因此在处理大量数据时通常比 fopen 更高效。 总的来说,如果你只是进行简单的文件读写操作,并且希望使用标准库函数进行处理,那么可以选择使用 fopen 。但是,如果你需要更高效的文件操作,并且需要使用系统调用函数进行底层控制,那么可以选择使用 open 。
fwrite 是 C 标准库中的函数,用于将数据写入文件。它会先将数据写入缓冲区,然后再将缓冲区的数据写入文件。相比之下, write 是一个系统调用,直接将数据写入文件,不经过缓冲区。 对于小数据量的写入操作, fwrite 的效率可能会更高,因为它可以将多个小数据一次性写入缓冲区,然后一次性写入文件,减少了系统调用的次数。 而对于大数据量的写入操作, write 的效率可能更高。因为 fwrite 需要将数据先写入缓冲区,然后再写入文件,这个过程可能会涉及到多次的缓冲区刷新操作。而 write 直接将数据写入文件,减少了缓冲区刷新的开销。 此外,还需要考虑到缓冲区大小的影响。如果缓冲区大小适合数据量, fwrite 可能会有更好的性能。但是如果数据量超过了缓冲区大小, fwrite 需要多次刷新缓冲区,可能导致性能下降。 总的来说,对于小数据量的写入操作, fwrite 可能更高效。而对于大数据量的写入操作, write 可能更高效。但是具体的效率还需要根据具体的场景和需求进行测试和评估。
使用系统调用的方式如下:
int main(int argc, char *argv[])
{
//导出DC口,这里使用的是GPIO1管脚,作为DC口使用(命令数据选择管脚)
//system("echo 1 > /sys/class/gpio/export");
//system("echo out >/sys/class/gpio/gpio1/direction");
system("echo 1 > /sys/class/gpio/unexport");
ssize_t bytes_written;
const char* value = "1";
// 打开 /sys/class/gpio/export 文件
fd_dc = open("/sys/class/gpio/export", O_WRONLY,0644);
if (fd_dc == -1) {
// 处理打开文件失败的情况
printf("open error\n");
return -1;
}
bytes_written = write(fd_dc, "1", 1);
close(fd_dc);
if (bytes_written == -1) {
// 处理写入文件失败的情况
printf("write failed: %s\n", strerror(errno));
return -1;
}
// 打开 /sys/class/gpio/gpio1/direction 文件
fd_dc = open("/sys/class/gpio/gpio1/direction", O_WRONLY,0644);
if (fd_dc == -1) {
// 处理打开文件失败的情况
printf("open error1\n");
return -1;
}
bytes_written = write(fd_dc, "out", 3);
close(fd_dc);
if (bytes_written == -1) {
// 处理写入文件失败的情况
printf("write failed1: %s\n", strerror(errno));
return -1;
}
// 打开 /sys/class/gpio/gpio1/value 文件
fd_dc = open("/sys/class/gpio/gpio1/value", O_WRONLY,0644);
if (fd_dc == -1) {
// 处理打开文件失败的情况
printf("open error2\n");
return -1;
}
bytes_written = write(fd_dc, value, strlen(value));
fsync(fd_dc);
spidev_init();
OLED_Init();
OLED_ShowString(0,0,"hello world");
return 0;
}在调用 open 函数时,可以通过第二个参数指定文件的访问权限。权限参数是一个八进制数,表示文件的读、写和执行权限。 以下是一些常用的权限参数值:
- O_RDONLY :只读模式,表示打开文件以供读取。
- O_WRONLY :只写模式,表示打开文件以供写入。
- O_RDWR :读写模式,表示打开文件以供读取和写入。
- O_CREAT :如果文件不存在,则创建文件。
- O_EXCL :与 O_CREAT 一起使用,如果文件已经存在,则返回错误。
- O_TRUNC :如果文件存在,并且以写入模式打开,则将文件截断为零长度。
- O_APPEND :以追加模式打开文件,即写入时将数据追加到文件末尾。 权限参数可以与上述标志位进行位运算,以指定文件的访问权限。例如,若要以读写模式打开文件并在文件不存在时创建它,可以使用以下权限参数:
int fd = open("filename.txt", O_RDWR | O_CREAT, 0644);在上述示例中, 0644 是一个八进制数,表示文件的权限。其中, 0 表示八进制数, 6 表示用户(文件所有者)具有读写权限, 4 表示组用户具有只读权限, 4 表示其他用户具有只读权限。 需要注意的是,权限参数只在创建文件时起作用,对于已经存在的文件,权限参数不会改变文件的权限。文件的实际权限由文件系统的权限控制决定。
最后,为了测试OLED,写一段简单的makefile,方便编译。
# test spidev-oled
#
# Copyright (C) 2023 yangyongzhen <5234117529@qq.com>
#
CC ?= arm-linux-gnueabihf-gcc
AR ?= arm-linux-gnueabihf-ar
STRIP ?= strip
CFLAGS ?= -O2
# When debugging, use the following instead
#CFLAGS := -O -g
CFLAGS += -Wall
SOCFLAGS := -fpic -D_REENTRANT $(CFLAGS)
#KERNELVERSION := $(shell uname -r)
.PHONY: all strip clean
all:
$(CC) spidev_oled.c -o spidev_oled
clean:
rm -rf *.o
测试demo:
int main(int argc, char *argv[])
{
//导出DC口,这里使用的是GPIO1管脚,作为DC口使用(命令数据选择管脚)
//system("echo 1 > /sys/class/gpio/export");
//system("echo out >/sys/class/gpio/gpio1/direction");
u8 t;
dc_p = fopen("/sys/class/gpio/export","w");
fprintf(dc_p,"%d",1);
fclose(dc_p);
dc_p = fopen("/sys/class/gpio/gpio1/direction","w");
fprintf(dc_p,"out");
fclose(dc_p);
dc_p = fopen("/sys/class/gpio/gpio1/value","w");
fprintf(dc_p,"1");
fflush(dc_p);
spidev_init();
OLED_Init();
while(1)
{
OLED_Clear();
OLED_ShowCHinese(0,0,0);//中
OLED_ShowCHinese(18,0,1);//景
OLED_ShowCHinese(36,0,2);//园
OLED_ShowCHinese(54,0,3);//电
OLED_ShowCHinese(72,0,4);//子
OLED_ShowCHinese(90,0,5);//科
OLED_ShowCHinese(108,0,6);//技
OLED_ShowString(0,3,"1.3' OLED TEST");
//OLED_ShowString(8,2,"ZHONGJINGYUAN");
// OLED_ShowString(20,4,"2014/05/01");
OLED_ShowString(0,6,"ASCII:");
OLED_ShowString(63,6,"CODE:");
OLED_ShowChar(48,6,t);//显示ASCII字符
t++;
if(t>'~')t=' ';
OLED_ShowNum(103,6,t,3,16);//显示ASCII字符的码值
delay_ms(8000);
OLED_Clear();
delay_ms(8000);
OLED_DrawBMP(0,0,128,8,BMP1); //图片显示(图片显示慎用,生成的字表较大,会占用较多空间,FLASH空间8K以下慎用)
delay_ms(8000);
OLED_DrawBMP(0,0,128,8,BMP2);
delay_ms(8000);
}
} 
工程完整源码下载地址:
https://download.csdn.net/download/qq8864/88117562
其他资源
嵌入式Linux——IIC总线驱动(3):IIC驱动OLED外设_iic怎么唤醒外设_moxue10的博客-CSDN博客
Linux系统GPIO应用编程_linux控制gpio程序_行稳方能走远的博客-CSDN博客
linux系统基于syfs控制gpio_gpio linux sys_嵌入式Linux开发的博客-CSDN博客
交叉编译开源代码(以libgpiod为例)_libgpiod交叉编译_仰望&南极光的博客-CSDN博客
[imx6ull应用开发]GPIO编程之LED灯设备控制---sysfs方式和libgpiod方式_gpiod_line_request_output_WH^2的博客-CSDN博客
飞凌嵌入式技术帖——i.MX9352的GPIO怎么用?_dts_设备_操作
[imx6ull应用开发]GPIO编程之LED灯设备控制---sysfs方式和libgpiod方式_gpiod_line_request_output_WH^2的博客-CSDN博客
C语言方式(libgpiod) - Sipeed Wiki
Libgpiod库的使用,点亮LED_猪突猛进进进的博客-CSDN博客