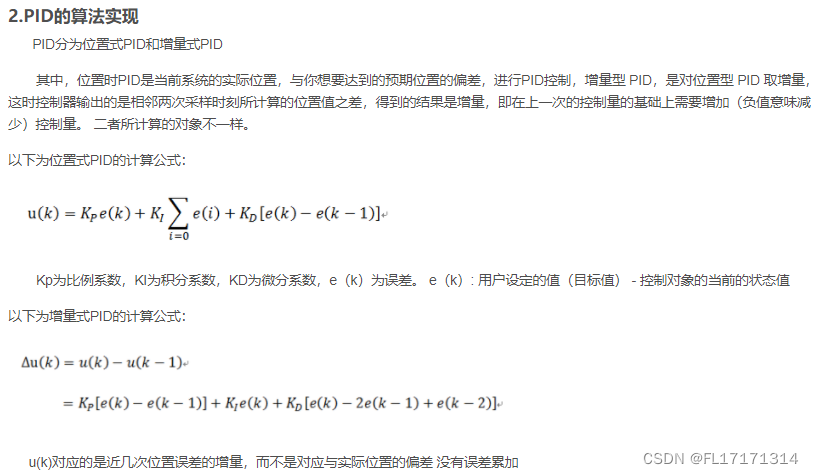
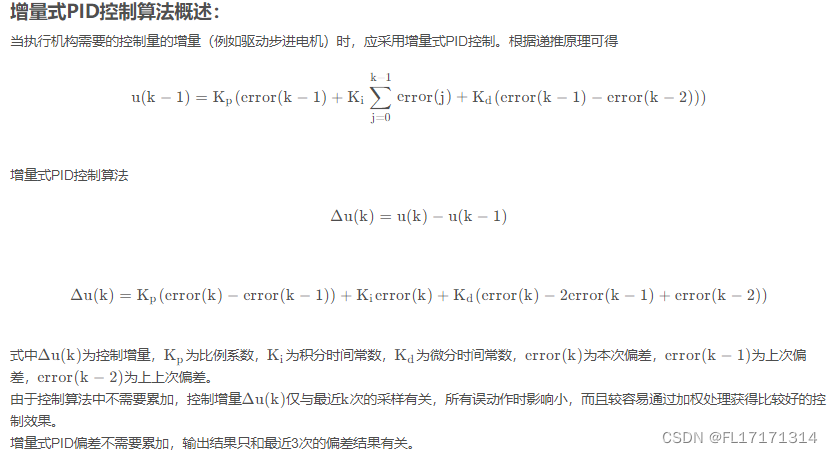
增量式PID算法是一种常用的控制算法,用于控制系统中的反馈控制。它通过对系统的误差进行递推式的计算,实现对系统输出的调节,使得系统的输出逐渐趋向于设定值。
delta u(k)=u(k)-u(k-1)=Kp*(e(k)-e(k-1))+Ki*e(k)+Kd*(e(k)-2*e(k-1)+e(k-2))PID算法由三个部分组成:比例(P)、积分(I)、微分(D)控制器。它们分别对应于系统误差的三个方面:比例控制器用于消除瞬态误差,积分控制器用于消除稳态误差,微分控制器用于抑制系统的超调和震荡。
增量式PID算法的计算公式如下:
-
计算比例项(P): P = Kp * (error - prev_error)
-
计算积分项(I): I = Ki * error
-
计算微分项(D): D = Kd * (error - 2 * prev_error + prev2_error)
-
计算PID输出: output = prev_output + P + I + D
其中,error是当前的误差,prev_error是上一时刻的误差,prev2_error是上上一时刻的误差,prev_output是上一时刻的输出,Kp、Ki和Kd分别是比例、积分和微分控制器的增益。
MATLAB实现增量式PID算法的伪代码如下:
% 设定PID参数
Kp = 1.0;
Ki = 0.5;
Kd = 0.1;
% 初始化误差和输出
prev_error = 0;
prev2_error = 0;
prev_output = 0;
% 循环执行PID控制
while true
% 获取当前的系统状态或测量值
current_value = get_current_value();
% 计算当前的误差
error = setpoint - current_value;
% 计算增量式PID控制器的输出
P = Kp * (error - prev_error);
I = Ki * error;
D = Kd * (error - 2 * prev_error + prev2_error);
output = prev_output + P + I + D;
% 更新误差和输出
prev2_error = prev_error;
prev_error = error;
prev_output = output;
% 将输出应用到控制系统中
apply_output(output);
end
%设一被控对象G(s)=400/(s^2+50s)
%采样时间为1ms,采用z变换进行离散化
clc
clear
ts=0.001;%采样时间
sys=tf(400,[1 50 0]);
dsys=c2d(sys,ts,'z');%采用z变换进行离散化
%把控制函数离散化取Z变换n阶定常离散系统差分方程
%在零初始条件下取Z变换:
%dsys即Y(z)/U(z)
[num,den]=tfdata(dsys,'v');%强制tfdata直接将分子和分母作为行向量而不是单元格数组返回
u1=0;u2=0;u3=0;%z变换之后的系数
y1=0;y2=0;y3=0;
x=[0 0 0]';%分别误差e,误差e的差分,误差e的积分
error1=0;
error2=0;
time=zeros(3000,1);%与分配内存
yd=zeros(3000,1);
u=zeros(3000,1);
y=zeros(3000,1);
for k=1:1:3000
time(k)=k*ts;%离散化的时间代表连续时间
yd(k)=1.0;%目标量
kp=8;
ki=0.10;
kd=10;
u(k)=kp*x(1)+kd*x(2)+ki*x(3);%PID输出
u(k)=u1+u(k);
if u(k