本文主要讲观察级水下机器人Valor配套的三维激光扫描仪,它是近年来ROV的主力光学设备。三维激光扫描仪是Voyis(原公司为2G Robotics)公司生产的,型号为ULS-500 Micro。
编辑
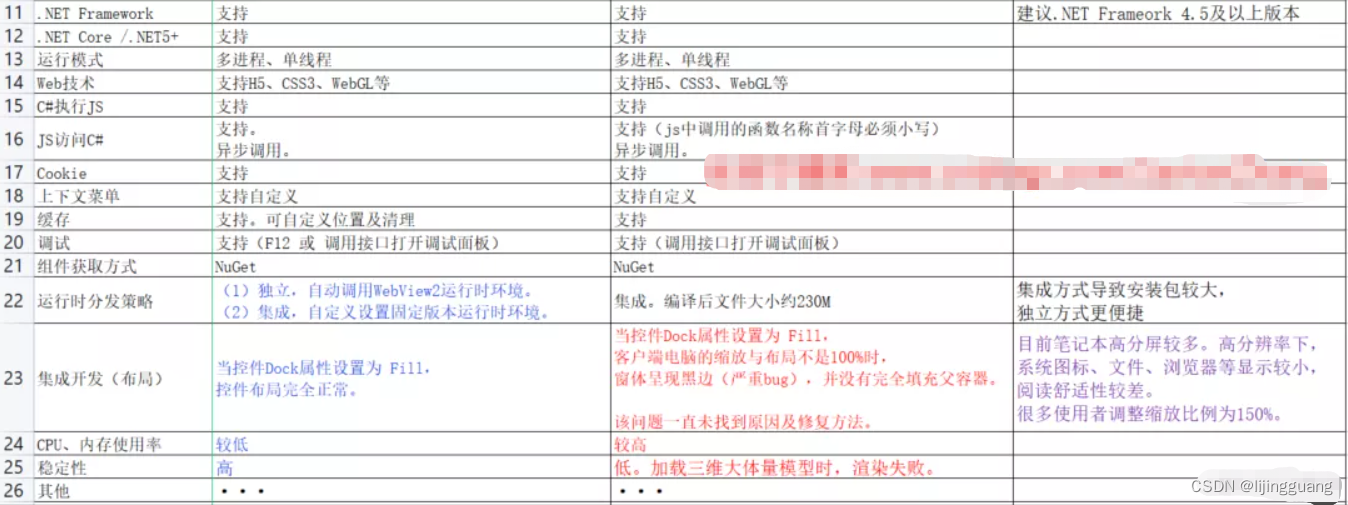
ULS-500 Micro的技术参数如下图。ULS-500 Pro扫描的量程要大一些。

三维激光扫描仪有2种作业方式,一种是静态模式,一种是动态模式。

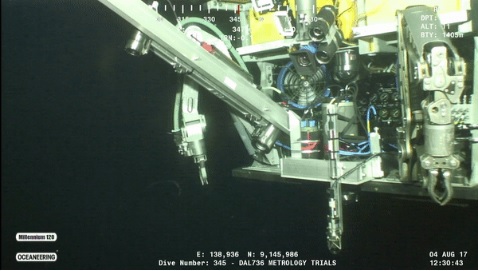
Voyis官网提供了三维激光扫描仪安装在ROV和实时采集的图。

同时,官网也提供了一个视频,包含了三维激光扫描仪扫测生物栖息地的效果图。

是不是很漂亮?想要获取如上图的效果,三维激光扫描仪的环境必须要严格限定,首先环境光要很弱,最好是漆黑的,然后水质要非常干净,不能有均匀分散的微颗粒。官方文档中与环境有关的描述内容翻译如下:
环境光的影响
环境光会导致噪声增加并限制扫描范围。环境光是指勘测环境中并非由 ULS-500 PRO 发出的任何光线。如果白天在海面附近作业,环境光可能来自太阳或 ROV 灯光。任何存在的环境光都将反射到目标上,并被 ULS-500 PRO 捕获。然后,系统必须将这些光线与目标反射的激光光线进行区分。如果环境光很强,则会使相机传感器饱和,系统算法将无法识别激光线。如果环境光很弱,但对比度足够高,那么激光线仍可在环境光背景下被识别出来。这与我们的眼睛在光线充足的城市中观察天空中的星星时很难识别的原理类似。
虽然理想的情况是没有环境光,但一定程度的环境光也是可以接受的。如果可能,ROV灯光不应照射到与激光扫描仪相同的目标上。ULS-500 PRO所使用的相机传感器具有很高的动态范围,有助于确保合理的环境光不会使传感器饱和。
浊度和微粒
水体中的微粒会显著影响系统范围和系统噪声。水体中的颗粒数量称为水的浊度。ULS-500 PRO的工作原理是由激光器发射激光脉冲,该脉冲必须从目标反射并返回相机。如果激光在到达目标之前反射到微粒上,则将在该位置测量一个数据点,而目标上将缺少相应的数据点。这些远离目标的数据点被视为噪声。如果微粒过多,则整个激光线将被阻断,目标上将不会返回任何数据点。
颗粒的大小决定这种影响的严重程度。大颗粒会阻挡激光线的特定区段,导致局部数据点缺失。如果在目标上测量了足够多的数据点以获得所需的测量结果,这种情况是可以接受的。然而,均匀分散的微粒会明显吸收/阻挡整条激光线,并明显限制激光扫描仪的量程。
什么情况下水质太浑浊不能使用ULS-500 PRO?
在您尝试之前,很难确定这一点,但一般的经验法则是,如果您能在激光扫描的范围内使用典型的水下相机和灯光看到目标,那么就可以使用ULS-500 PRO进行扫描。
ULS-500 PRO使用非常强大的激光和高灵敏度相机,因此,如果目标可以用标准相机和光源观测到,那么激光扫描仪也能够 "看到 "目标。
在近海,三维激光扫描仪是很难得到理想的效果,很多时候,回波大都是来自于水中的微粒反射,换句话说,三维点云都是噪声。除非去水质良好的深海,检验三维激光扫描仪只能在室内水池。
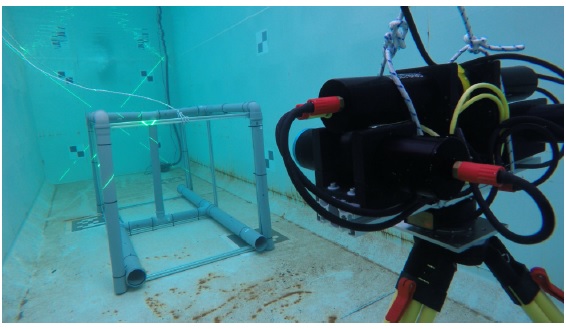
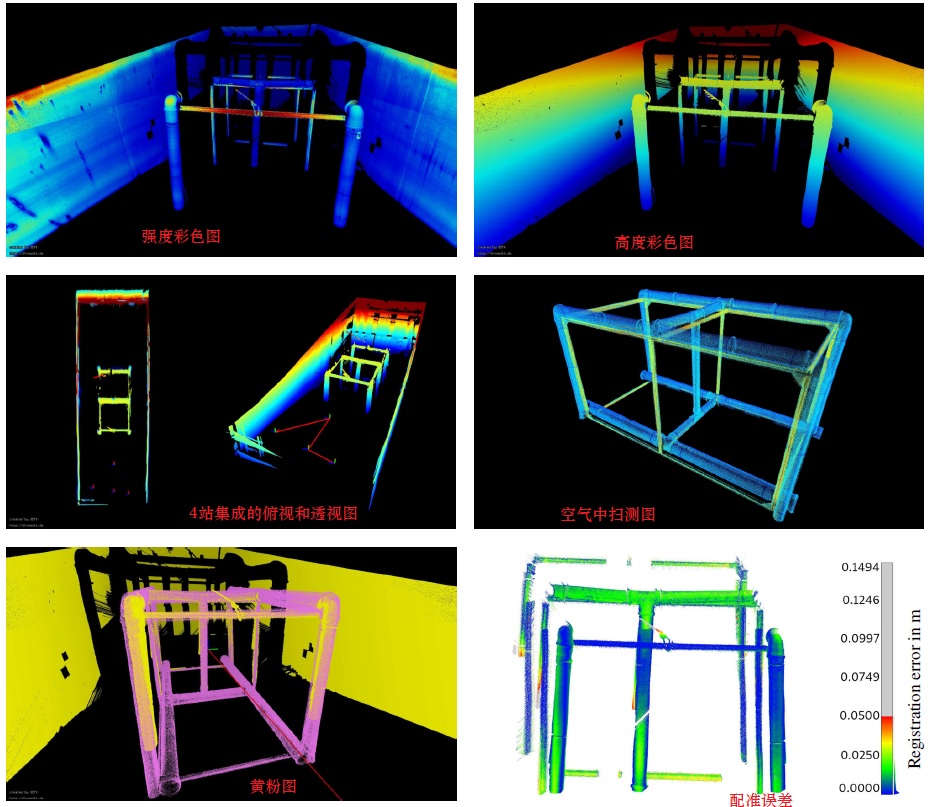
下图是三维激光扫描仪架设在水池中的三角夹上,扫测前面的由铝管和塑料管组成的框架。
水池扫测的效果图如下。
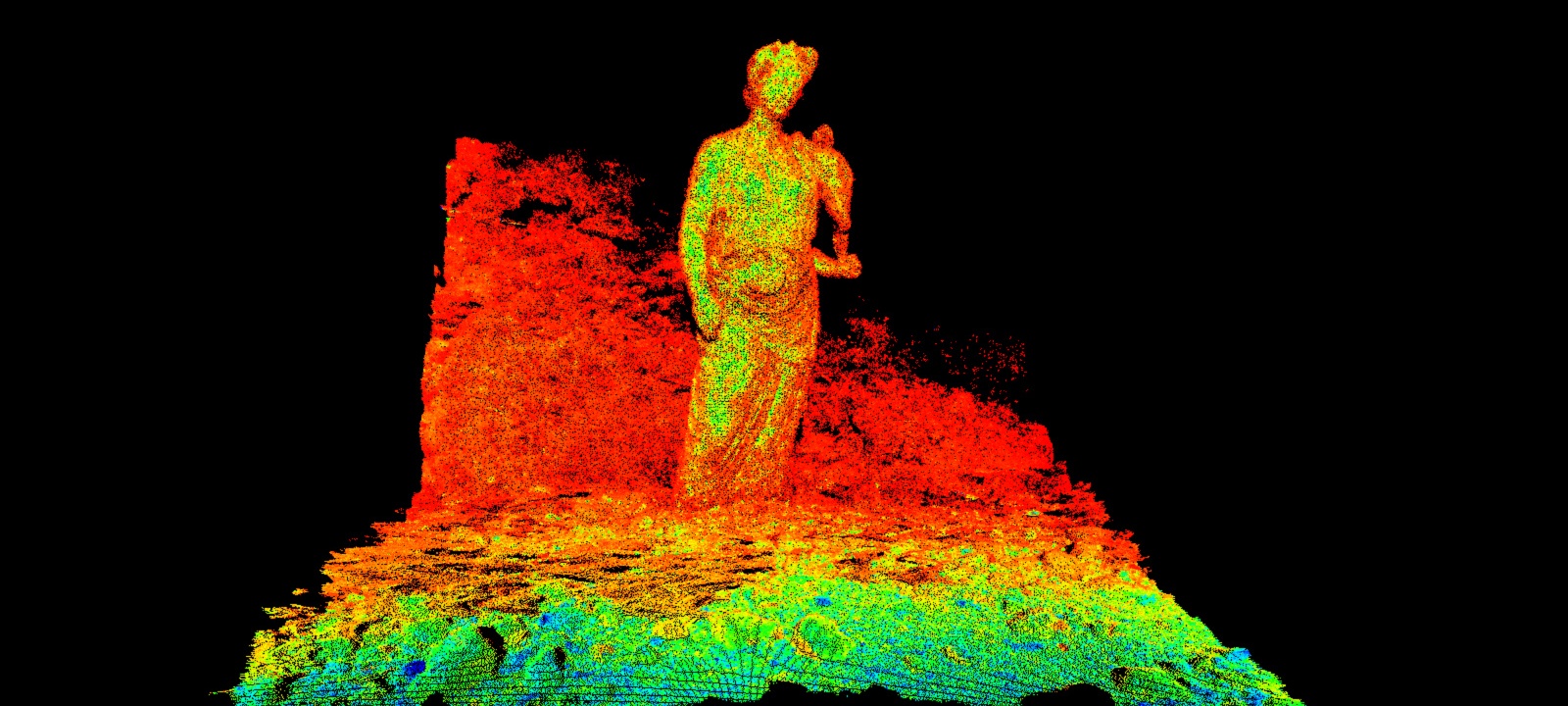
三维激光扫描仪可以用于考古、油气和科考。
水下雕像。
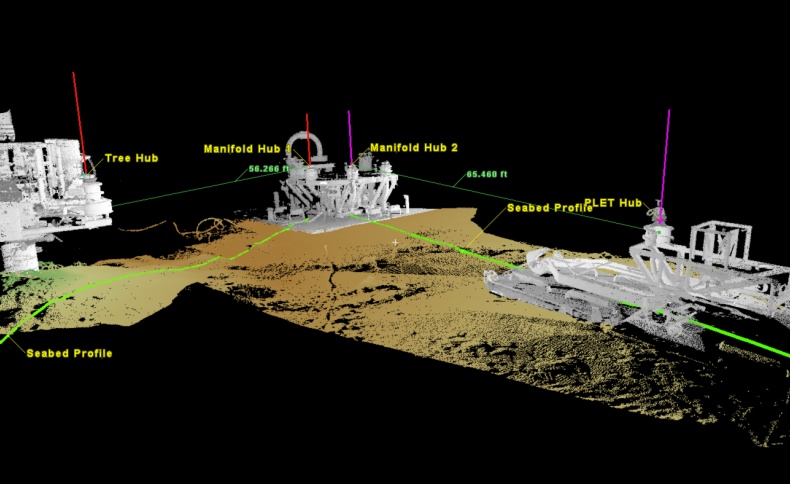
水下油气平台。
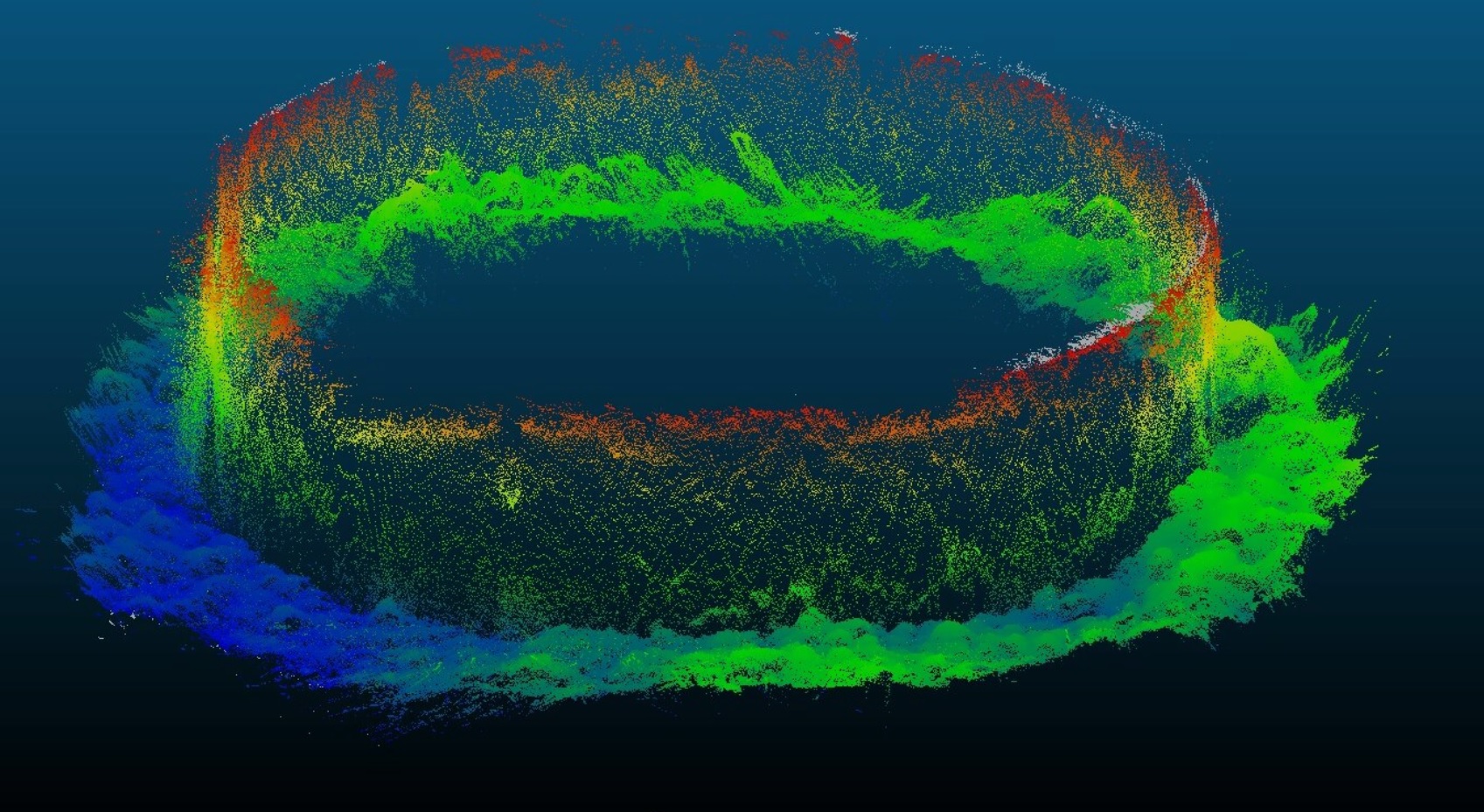
水下多金属结核。

风机单桩冲刷,不确定是三维声纳还是三维激光扫描仪做出来的?
《三维激光扫描在水下锚链检测中的应用研究_黄明泉》和《水下三维激光扫描在导管架平台损伤测量中的应用_刘彬》都是使用ROV搭载ULS200进行测量,使用步骤也基本一样。

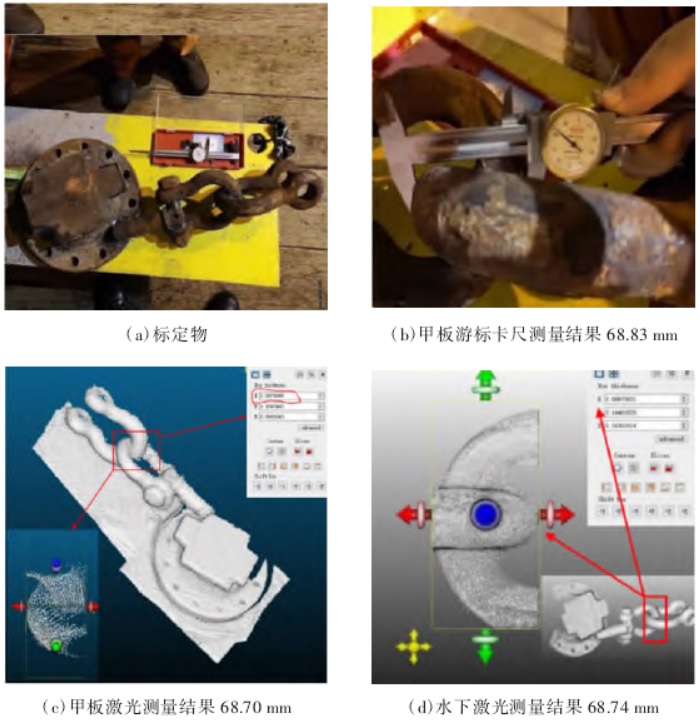
1、标定
为确保三维激光数据质量,在正式开始作业之前需对三维激光扫描仪进行水上、水下试扫,对比检验设备精度,达到设备标定的目的。选用与目标物结构相似的标定物,将人工游标卡尺测量结果与三维激光扫测结果作对比,如下图所示,精度满足作业要求后方可将三维激光扫描仪投入使用。
2、锚链扫测
在使用水下三维激光扫描仪对系泊锚链开始扫描之前,ROV 机械手搭载液压钢刷对附着在链环上的海生物和钙质层进行清理,清理后待海水浑浊度降低后方可实施三维激光扫描工作。
水下系泊锚链在不同位置处有不同的姿态形态,要得到完整的系泊锚链点云数据进行建模,需在系泊锚链的不同方位布放三维激光扫描仪,且在扫测过程中严格固定三维激光扫描仪,防止其晃动以造成多个站位上点云数据无法拼接或拼接变形的后果,因此在扫描工作进行前提前设计好三维激光扫描仪的布放位置。
为保证三维激光扫描仪与锚链之间的相对位置保持相对静止,研究人员专门设计了一个工装用于固定安装三维激光扫描仪,该工装可夹紧在锚链上以保持三维激光扫描仪与锚链的相对位置关系是稳定的。工装可用 ROV 机械手进行位置调整,将水下三维激光固定安装在 ROV 机械手上,通过电缆延长线与 ROV 水下集控模块连接,由 ROV 水下集控模块实时回传点云数据到甲板采集单元,如下图所示。

3、点云数据配准与拼接
使用ICP 迭代最近点算法,寻找两个点云的共像点,配准点云。

配准步骤及结果。

4、导管损伤检测
南海某导管架在安装过程中受到撞击,导致某一管状构件上产生长度约1.7m 的凹陷区域,以此为研究对象,开展三维激光扫描对损 伤点尺寸的测量研究。由于损伤面积较大,一次扫描无法获取所有损伤区域的激光点云数据。首先对损伤区域进行扫描设计,使用方形磁铁对损伤区域进行分割,如下图所示,平均分配成长度0.8m 左右的3个区域,磁铁作为分割标示,也是后续拼接的公共参考点。

ROV首先清除导管架损伤杆件上的附着钙质层和海洋生物,随后ROV放置磁铁于损伤点的指定位置,如下图a所示。ROV机械手搭载水下三维激光扫描仪下水,坐靠在导管架上保持稳定状态,调整三维激光扫描仪位置,分别对3个区域多角度进行扫描,中间区域的扫描需要覆盖两组磁铁,两侧区域的扫描需要覆盖损伤点边缘和一组磁铁,完成 凹陷位置的扫描采集,如下图b所示。

不同位置的扫测图。
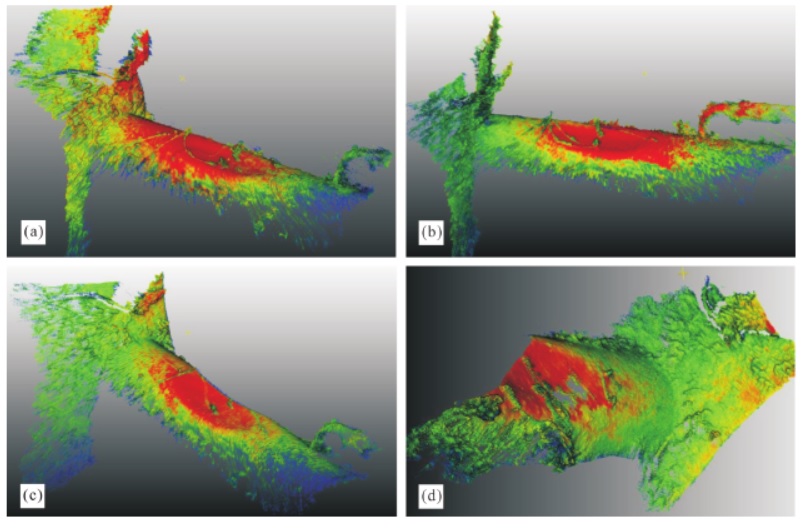
拼接图。

小结
水下三维激光扫描仪对使用环境要求非常高,环境光要足够弱,水质要足够清。使用模式无论是静态还是动态的,点云配准不仅依赖高精度的定位,而且与公共点密切相关。
参考文献
三维激光扫描在水下锚链检测中的应用研究_黄明泉
水下三维激光扫描在导管架平台损伤测量中的应用_刘彬
isprs-archives-XLII-2-W18-13-2019
https://3datdepth.com/applications/offshore-oil-and-gas
https://www.savante.co.uk/
https://voyis.com/
https://www.toyo.co.jp/kaiyo/news/detail/id=20224




![[国产MCU]-BL602开发实例-开发环境搭建](https://img-blog.csdnimg.cn/0bec42d3b60745b79b1de19dd4fba1ca.png#pic_center)