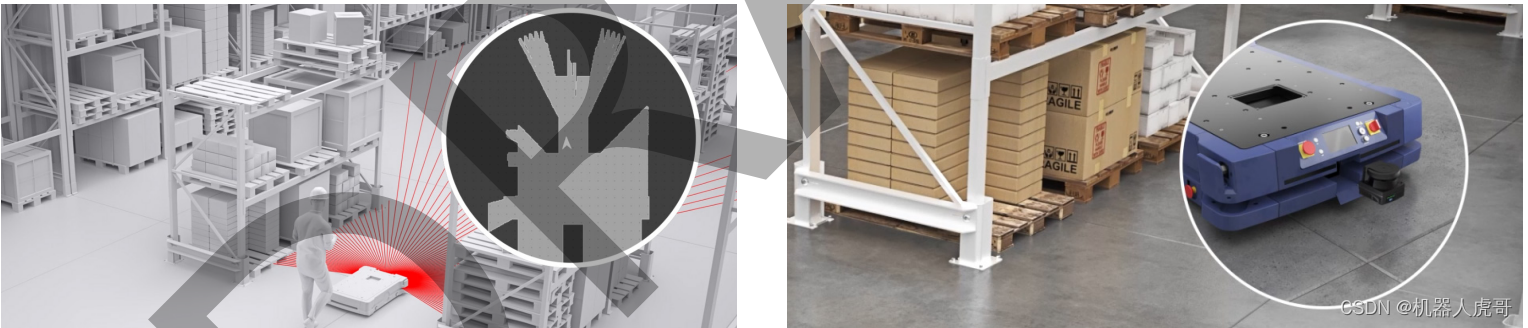
大家好,我是虎哥,朋友介绍,有一款单线激光雷达,25米的检测距离,有80HZ的扫描频率,而且角度分辨率最高可以到0.1°,这个参数我确实没有见过,所以立刻着手从厂家那申请到了VISIOSCAN雷达样品,第一时间亲自做做接入适配测试,总结一下自己的简单测试经验,分享给大家。

LZR®-VISIOSCAN RD是一款紧凑可靠的激光扫描仪,用于AGV/AMR在复杂的工业环境中的精确定位和导航。基于TOF技术,传感器可在275°的测量角度上扫描周围环境。LZR®-VISIOSCAN RD具有高角度分辨率和长探测范围,最适合SLAM导航应用AMR和叉车。通过灵活的访问端口和Starfleet软件,传感器易于配置和诊断。
目录
一、LZR®-VISIOSCAN RD 单线激光介绍
1.1 扫描范围
1.2 技术参数
二、WIN端测试配置
2.1 软件安装
2.2 链接雷达
2.3 软件界面介绍
2.4 修改雷达的IP
三、ROS下查看点云
3.0 设置雷达对应链接网口至同一网段IP
3.1 建立工作空间
3.2 拷贝代码
编辑
3.3 编译源码包
3.4 修改ROS 驱动启动脚本中对应的信息
3.6 启动驱动
3.7 启动RVIZ查看点云
编辑
四、总结
一、LZR®-VISIOSCAN RD 单线激光介绍
比业电子是一家很成熟的激光器生产厂家,之前一直致力于自动门行业的安全检测装置,这一款也是厂家为求突破,技术转化的一款产品,继承了厂家安全第一,可靠稳定的特点。
LZR®-VISIOSCAN RD生成高分辨率检测场每秒110080次可靠的距离测量,最高可达0.1°角分辨率,非常适合SLAM导航。厂家提供ROS驱动,利用BEA ROS驱动程序,该传感器可以很容易地集成到导航系统中。
1.1 扫描范围
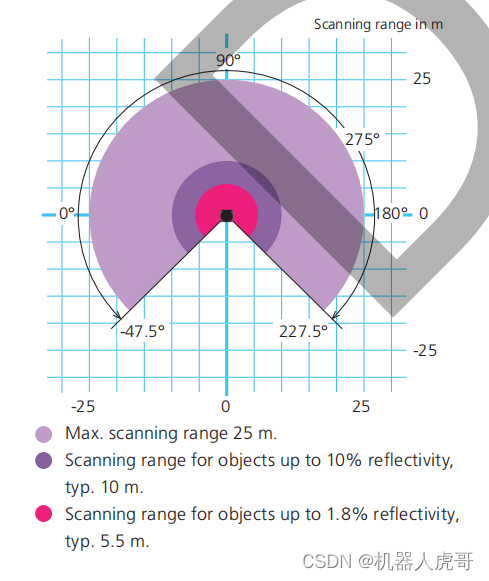
LZR®-VISIOSCAN 可以提供 275°范围的点云数据,90°的位置处于传感器的正前方,存在一段 90°的盲区,位于 227.5°~312.5°的区间。
1.2 技术参数
-
线数:单线
-
扫描原理:TOF
-
测距能力:0.08 - 25 m @ 90% reflectivity
-
精度(典型值):±20mm(典型值),静态可达±15mm
-
扫描角度:275°
-
水平角分辨率:0.2° @ 80 Hz, 0.1° @ 40 Hz
-
扫描速度:110080次 per second
-
以太网输出:网口(TCP/IP,100MBit/s)
-
工作功率:< 5.5W
-
供电电压:12-24 V DC
-
工作温度:-30°C to +60°C
-
防护等级:IP67
-
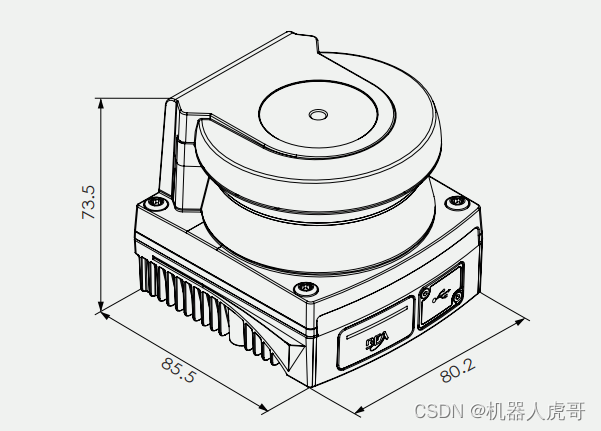
尺寸:85.5mmX80.2mmX73.5mm
二、WIN端测试配置
2.1 软件安装
官方提供了点云专用显示软件,并且支持很多CPU平台,我实在WIN11系统下,采用X64版本进行的测试。

默认需要安装一下。
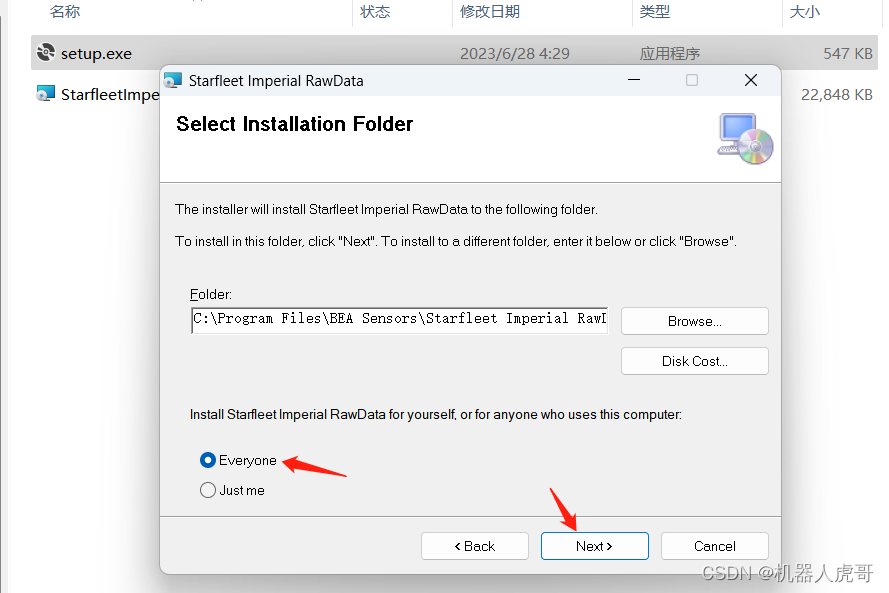
之后一路next就可以。然后等待安装完成。
安装完毕。

安装完毕后,你的电脑桌面多了一个文件夹。
打开软件先看看。
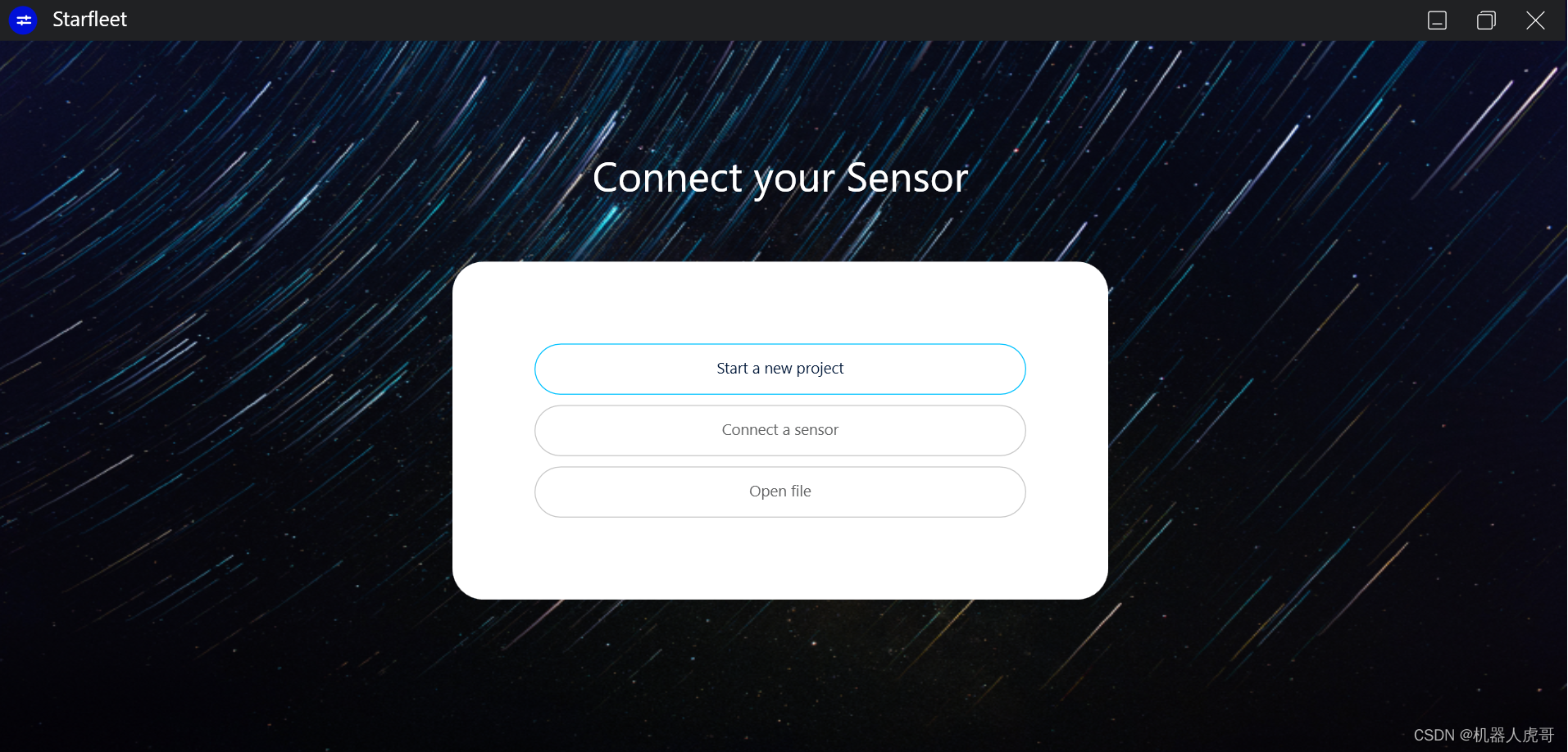
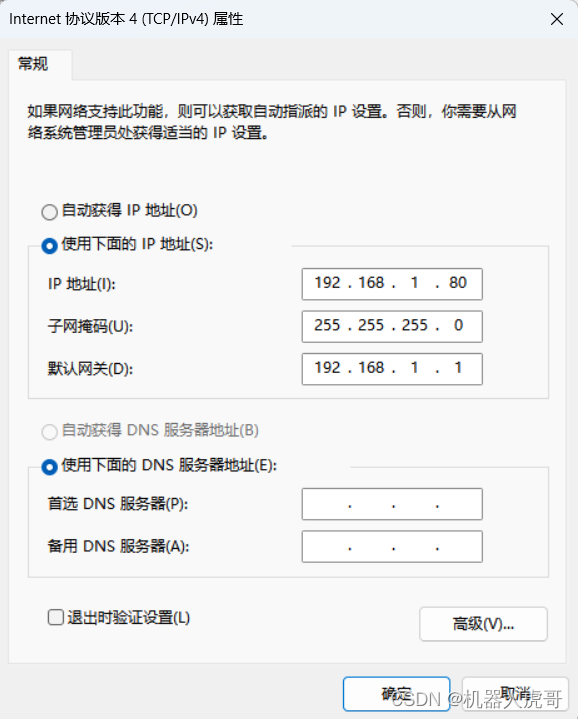
软件界面还挺有科幻感。接下来我们就是需要将雷达接到你电脑的网口上,雷达默认IP是:192.168.1.2 端口为:3050,这个在官方提供的手册上就能找到。先把自己的链接雷达的网卡修改到1网段一个固定IP上。我自己的电脑我设置是:192.168.1.80
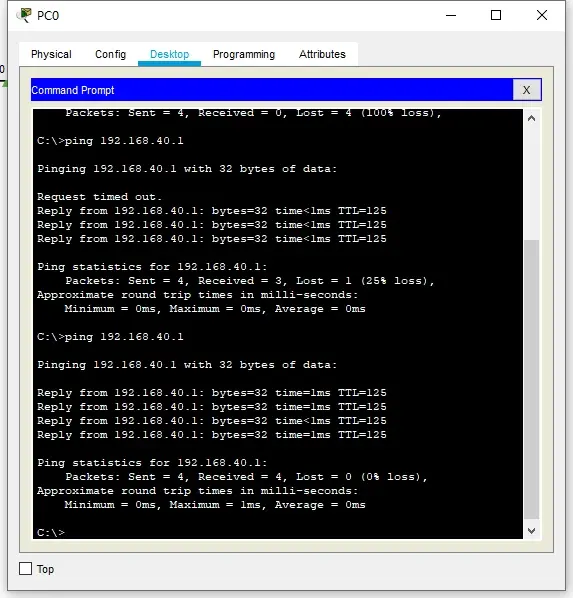
试试能不能ping通雷达默认的IP:
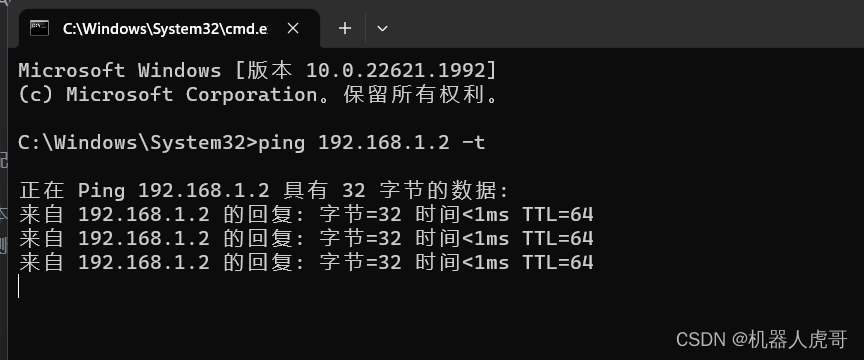
说明电脑和雷达之前的网络通信是OK的。接下来我们用官方软件先连上看看。
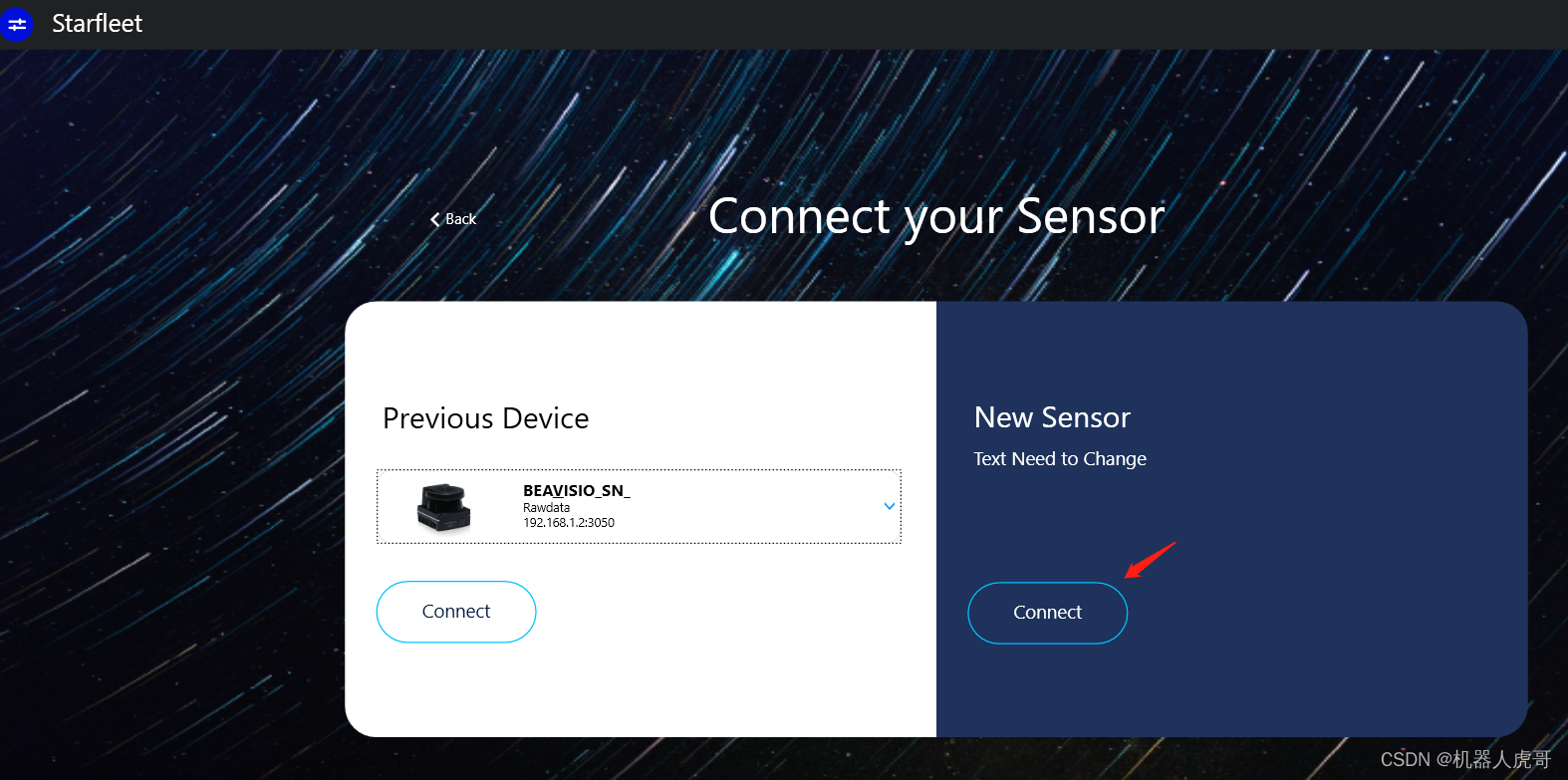
2.2 链接雷达
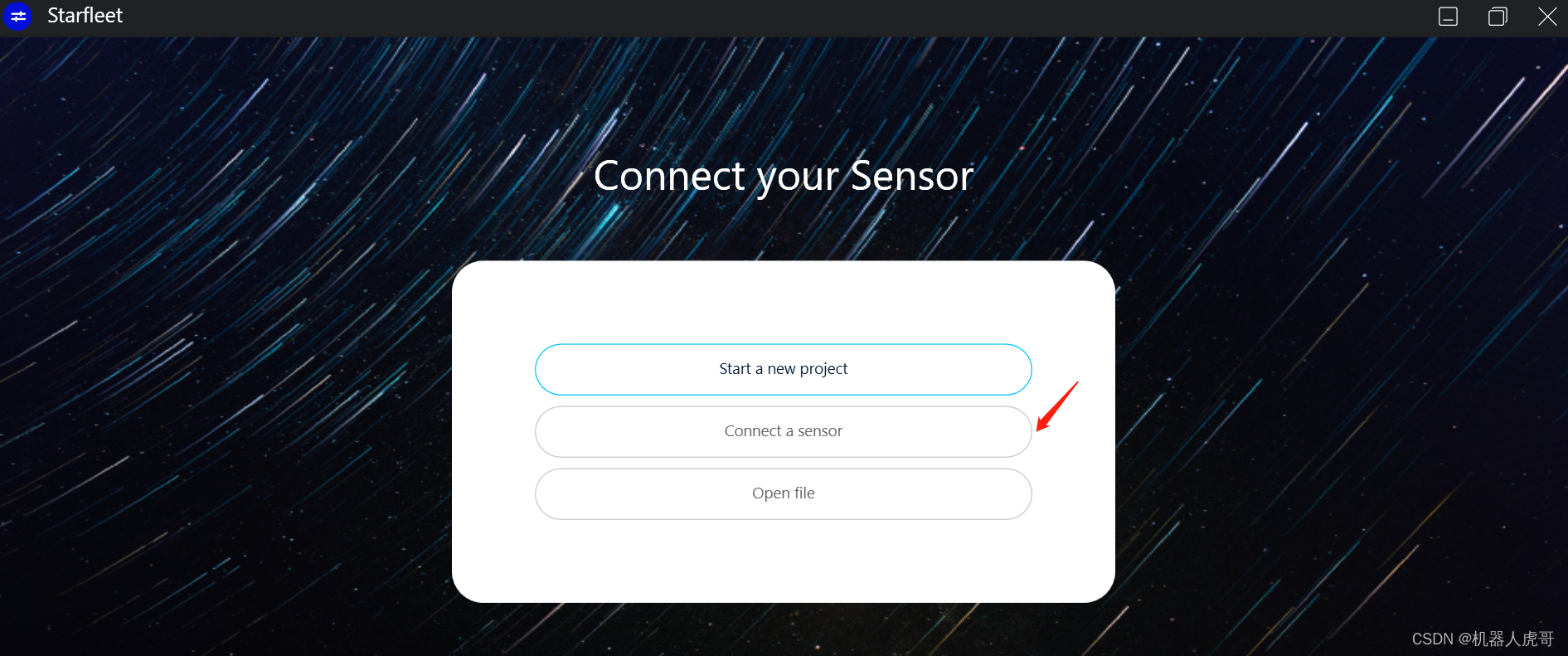
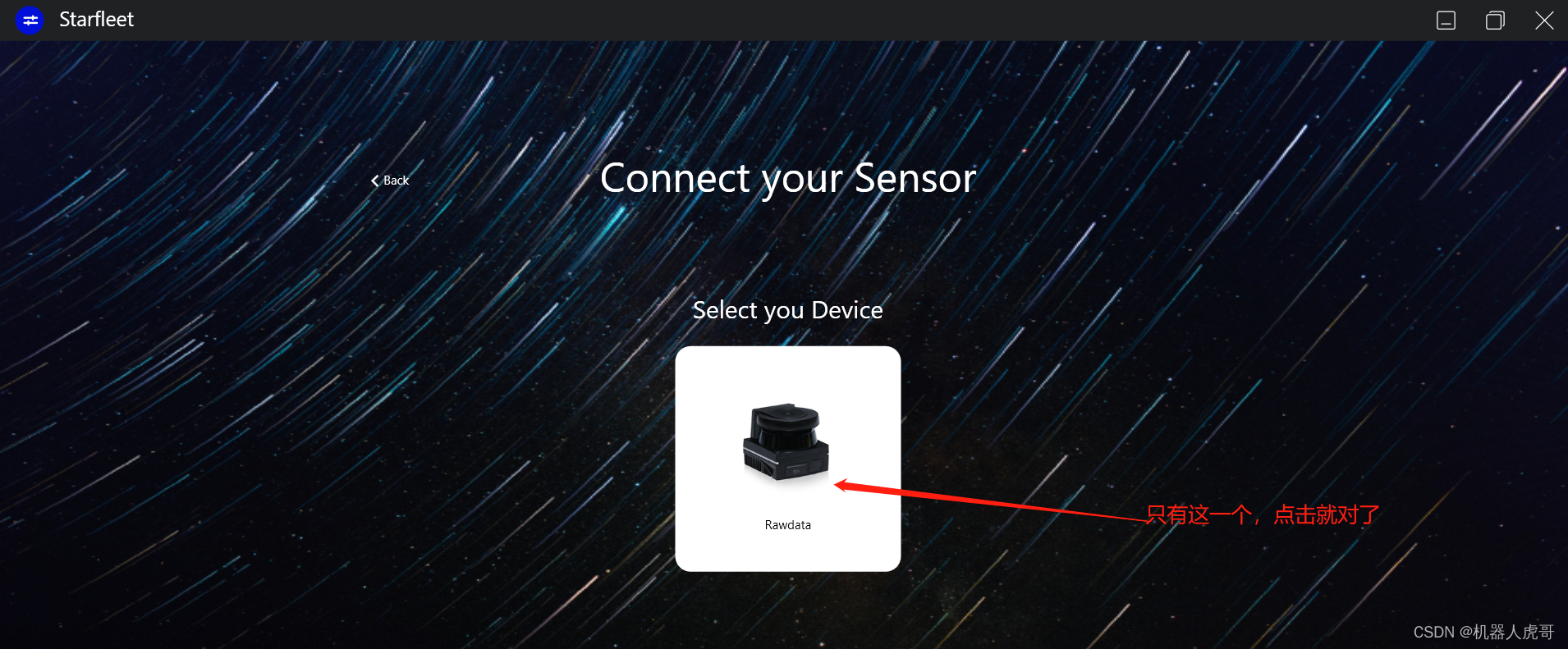
选择链接传感器。
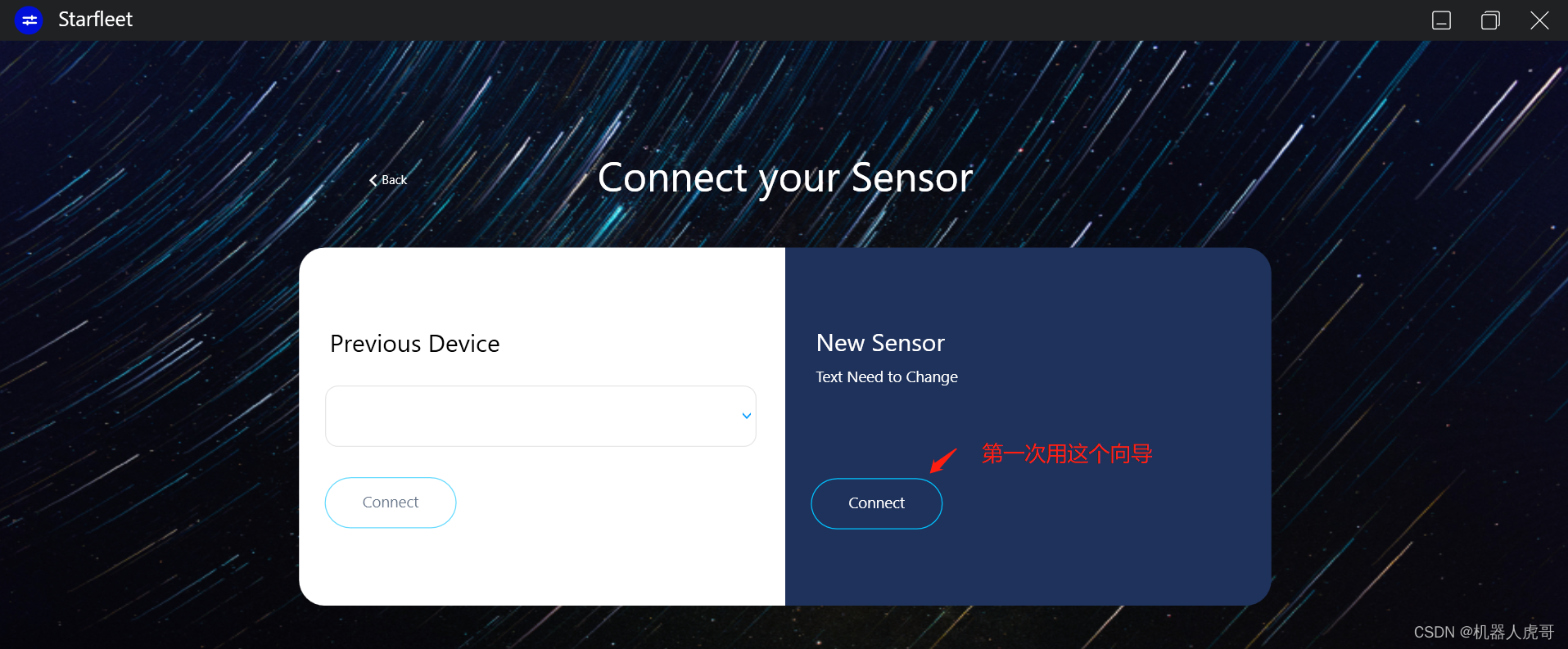
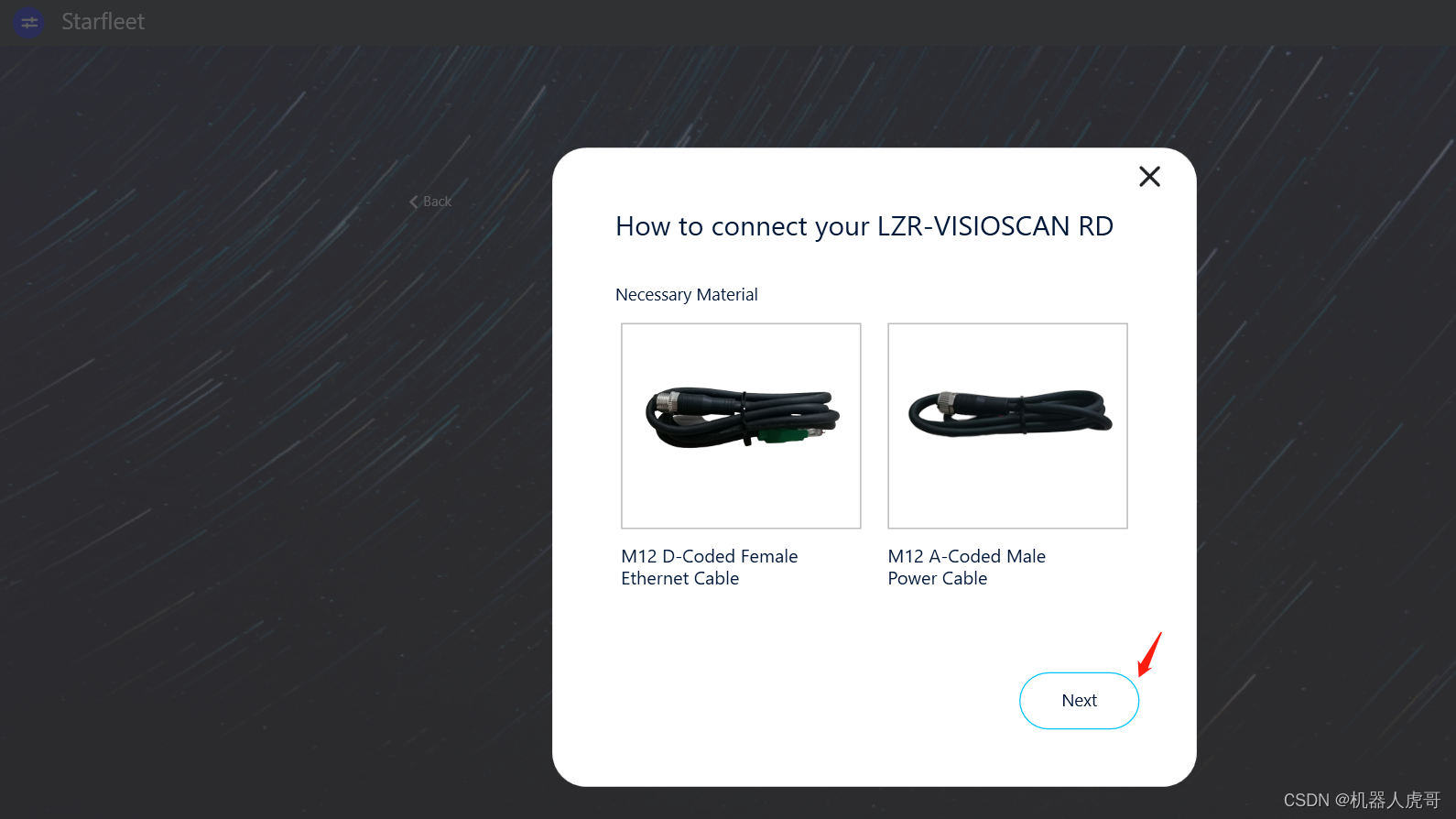
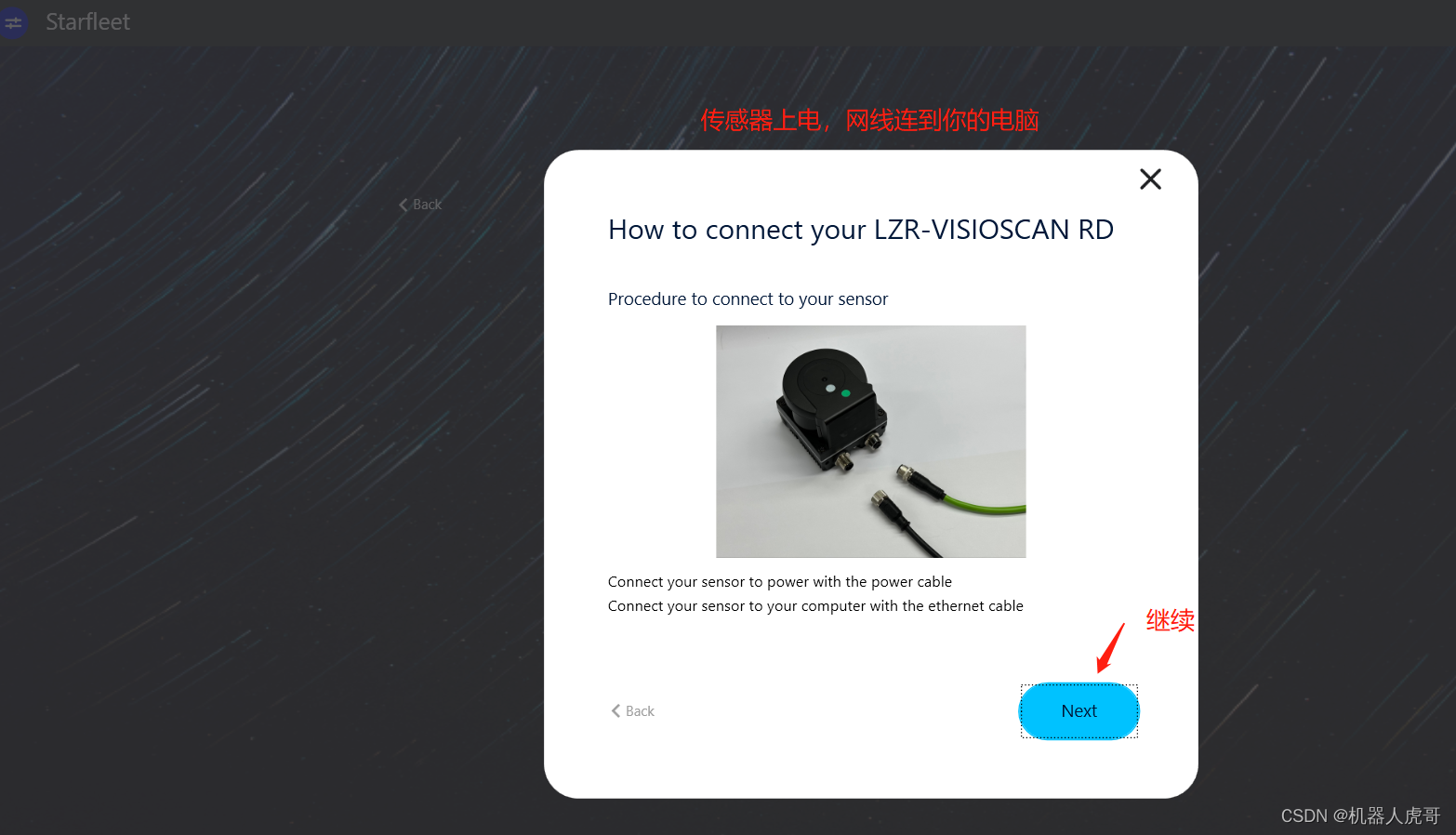
然后继续
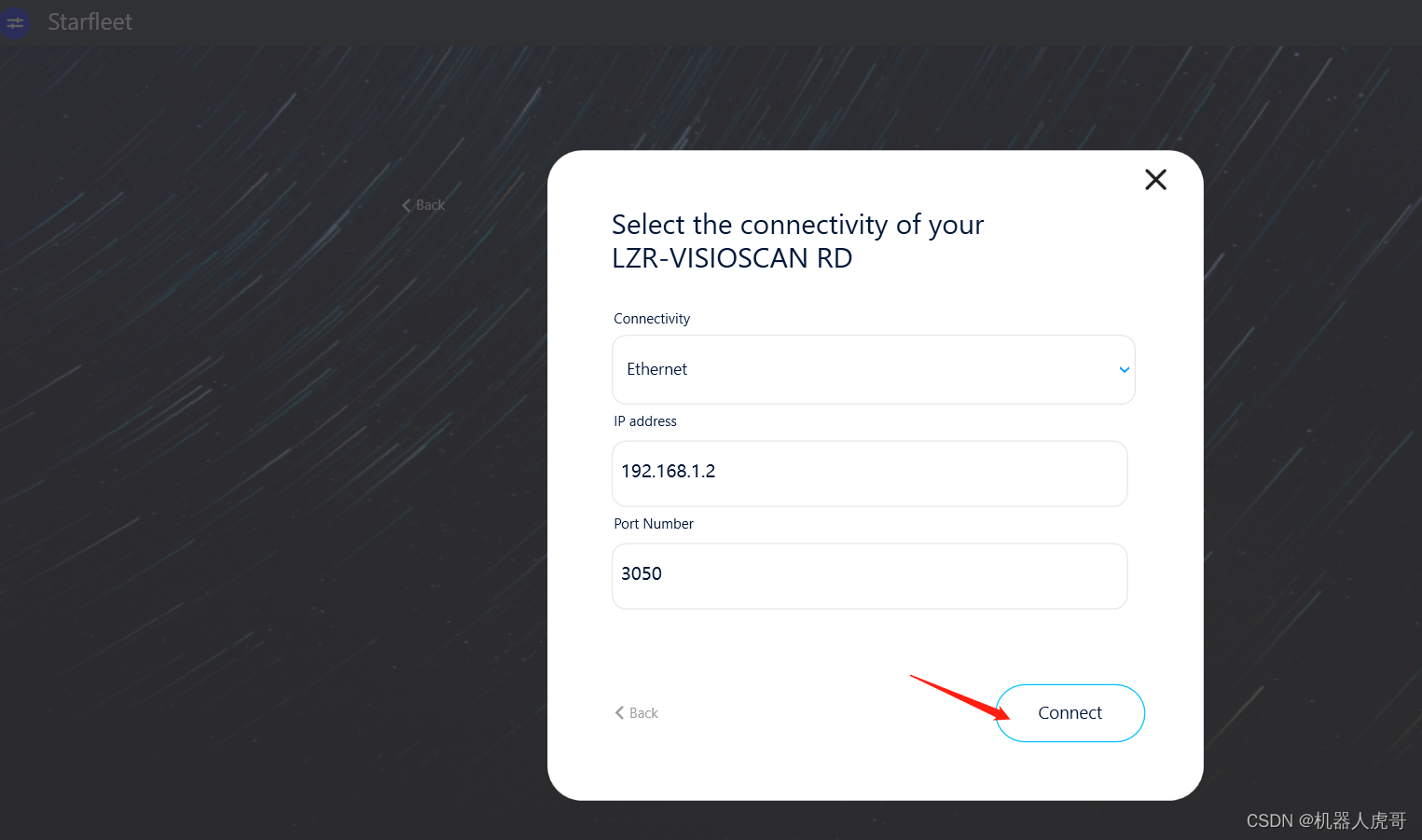
然后继续链接。
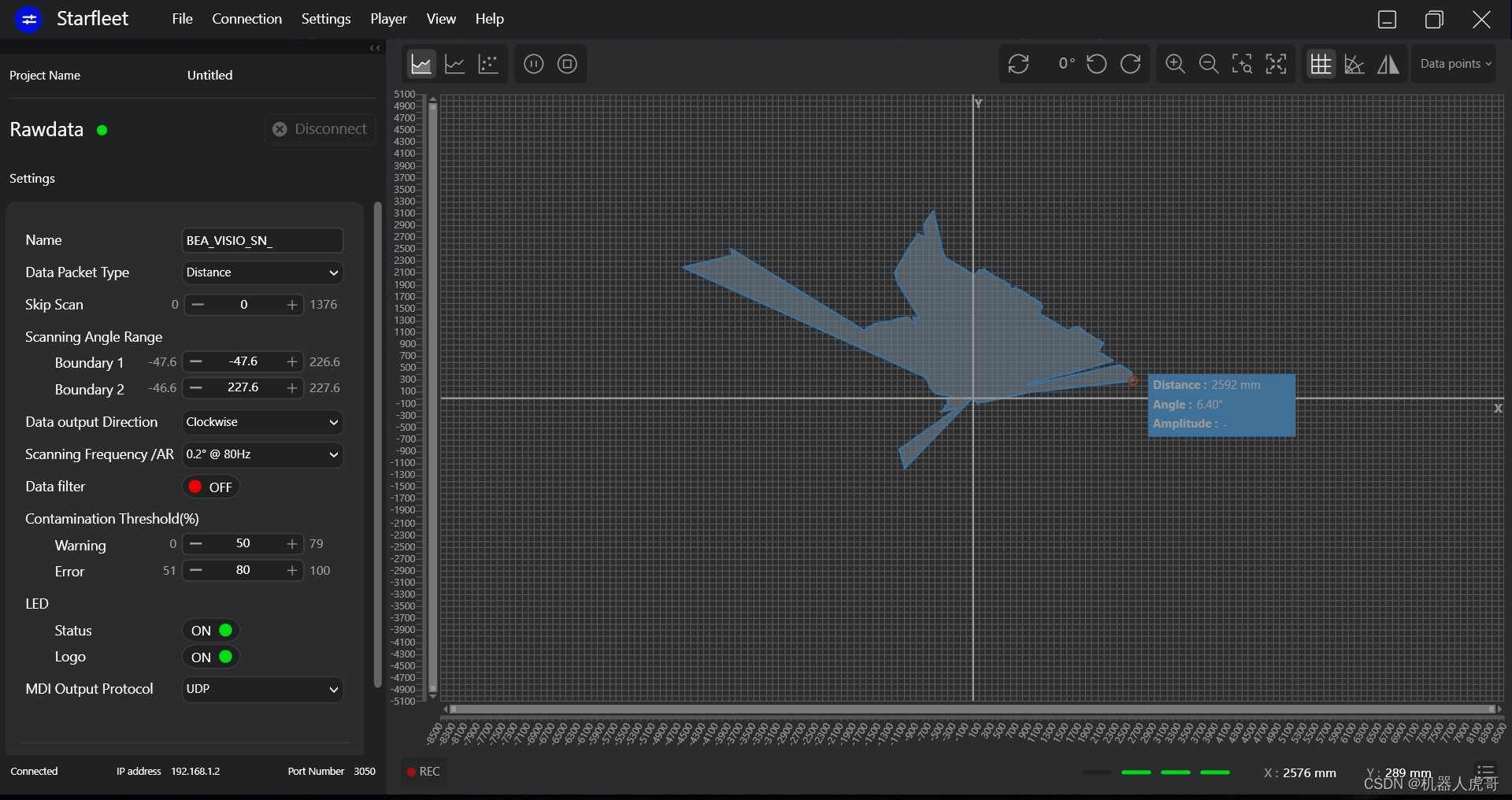
成功打开,你就可以看到雷达点云了。此时我们可以详细看看参数。
2.3 软件界面介绍
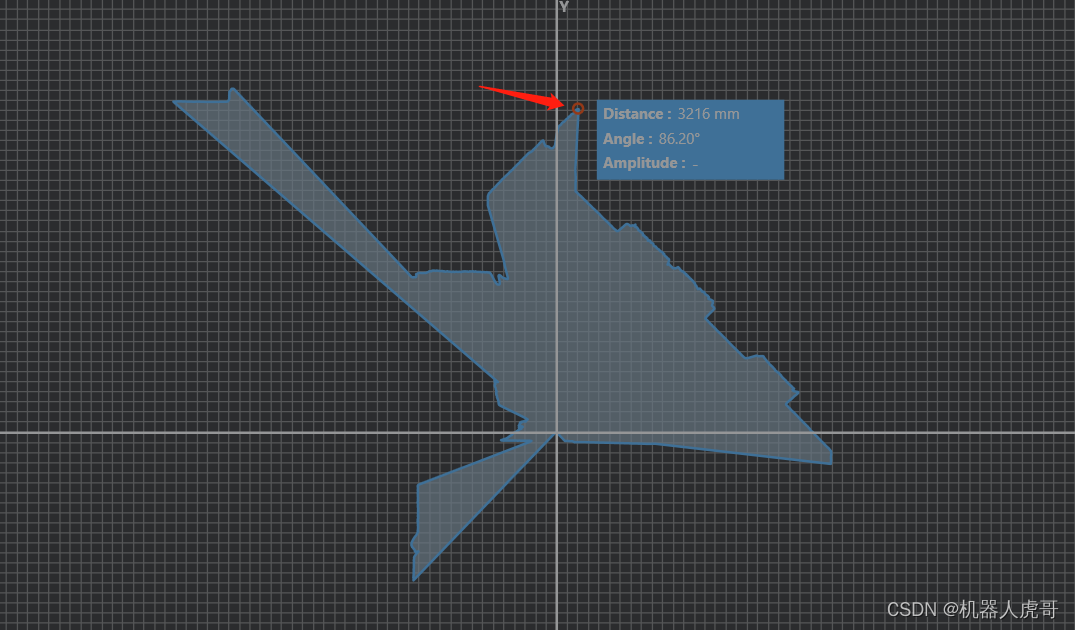
你可以移动鼠标,查看点云上的详细信息。
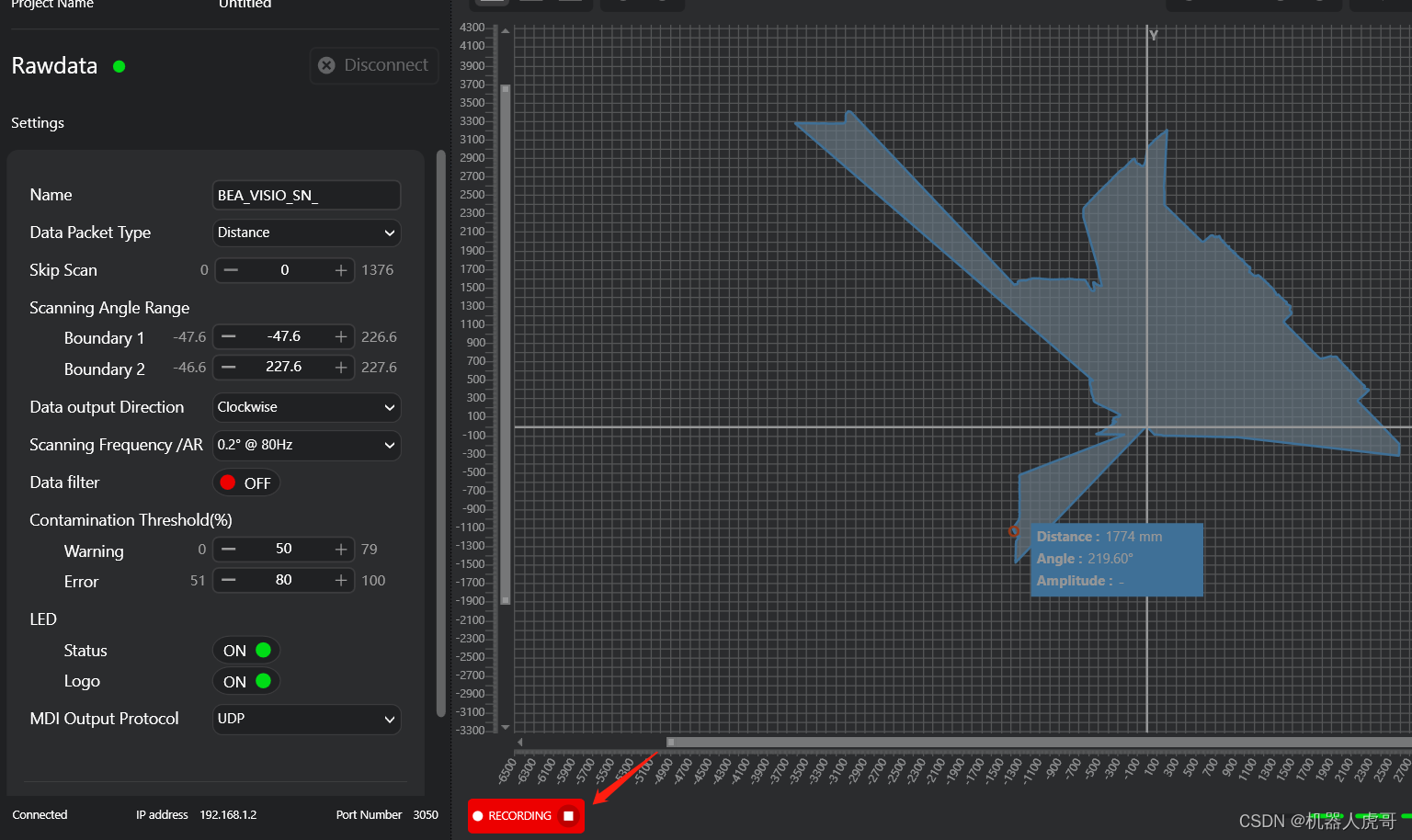
你还可以录制点云数据,录制成文件保存
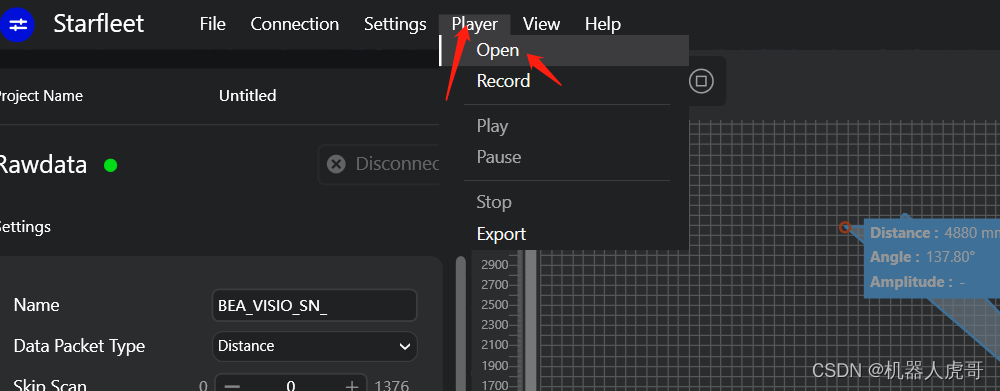
你也可以打开之前录制的点云数据,进行播放查看。
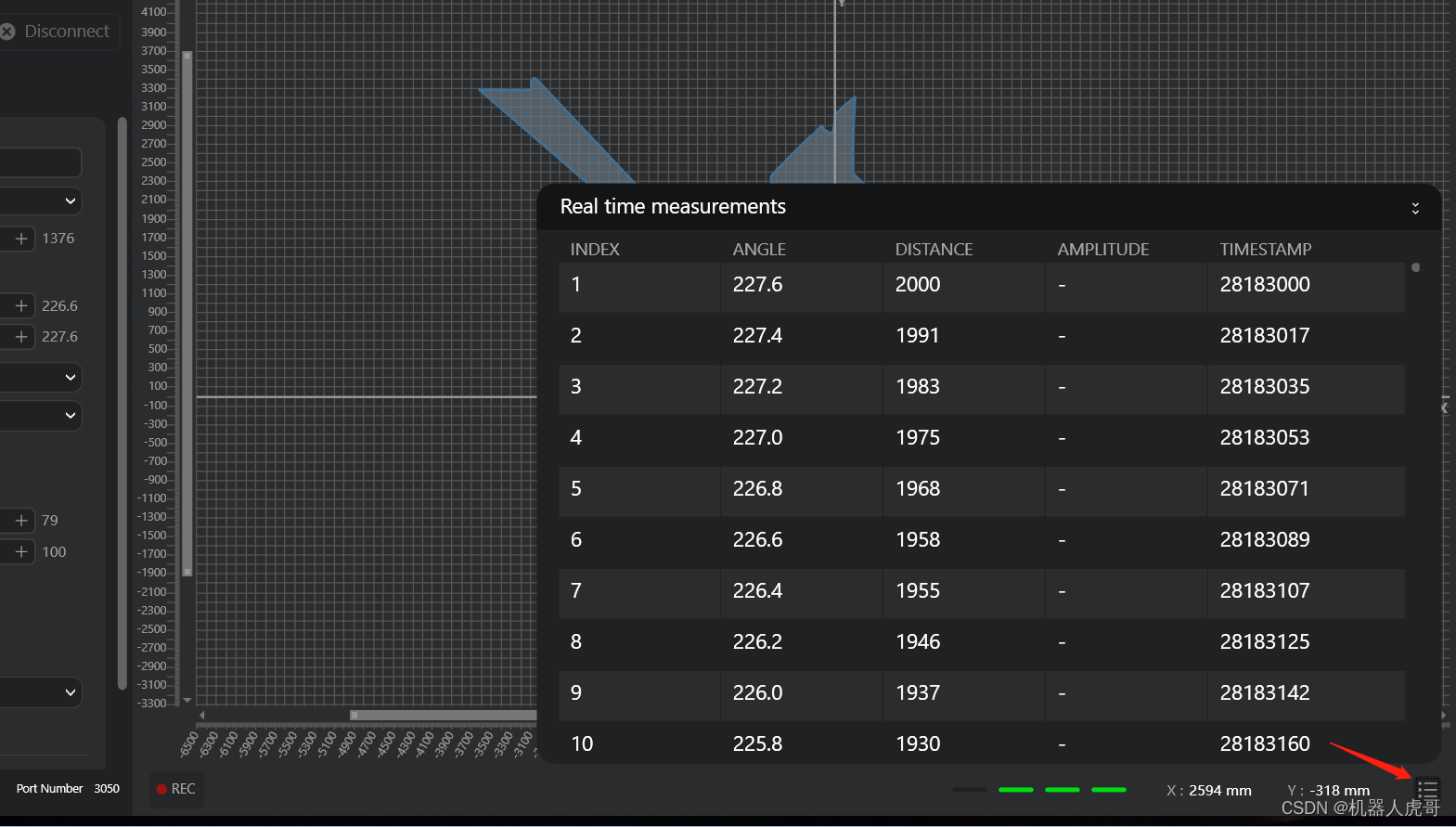
还可以查看实时数据表
2.4 修改雷达的IP
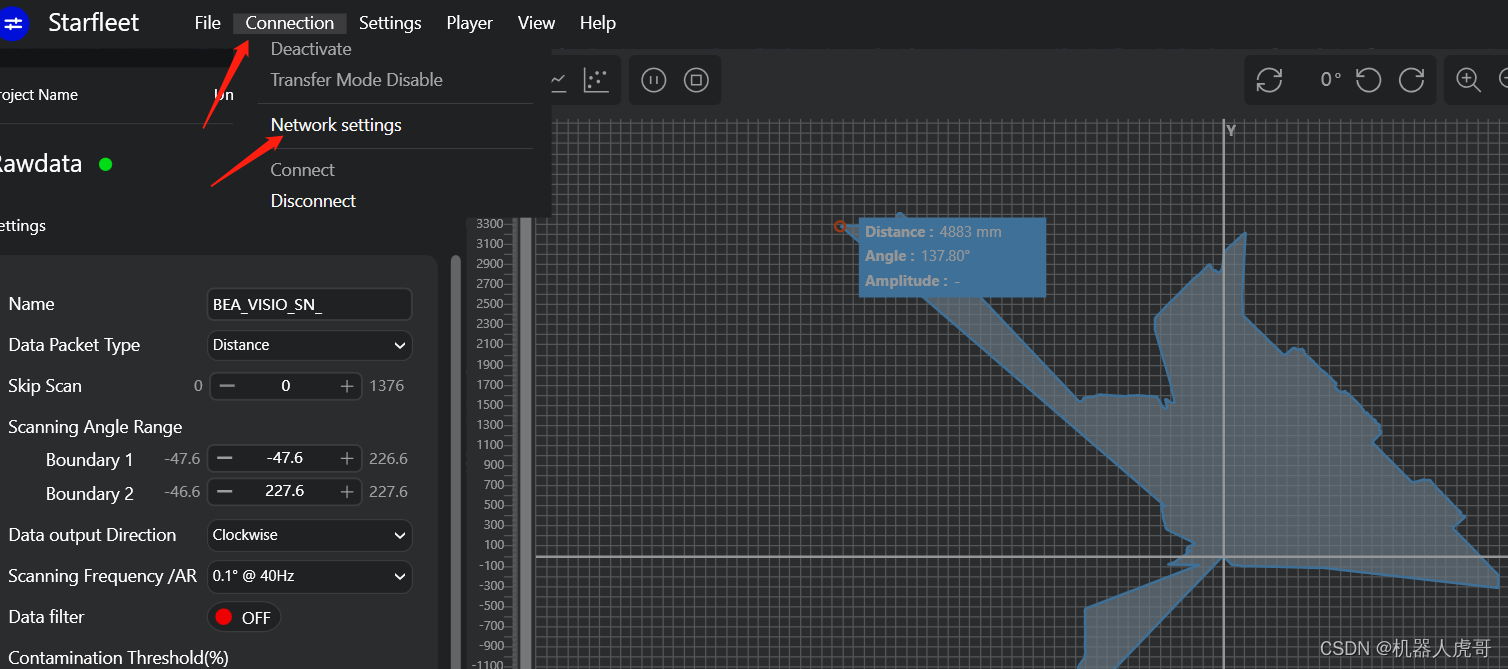
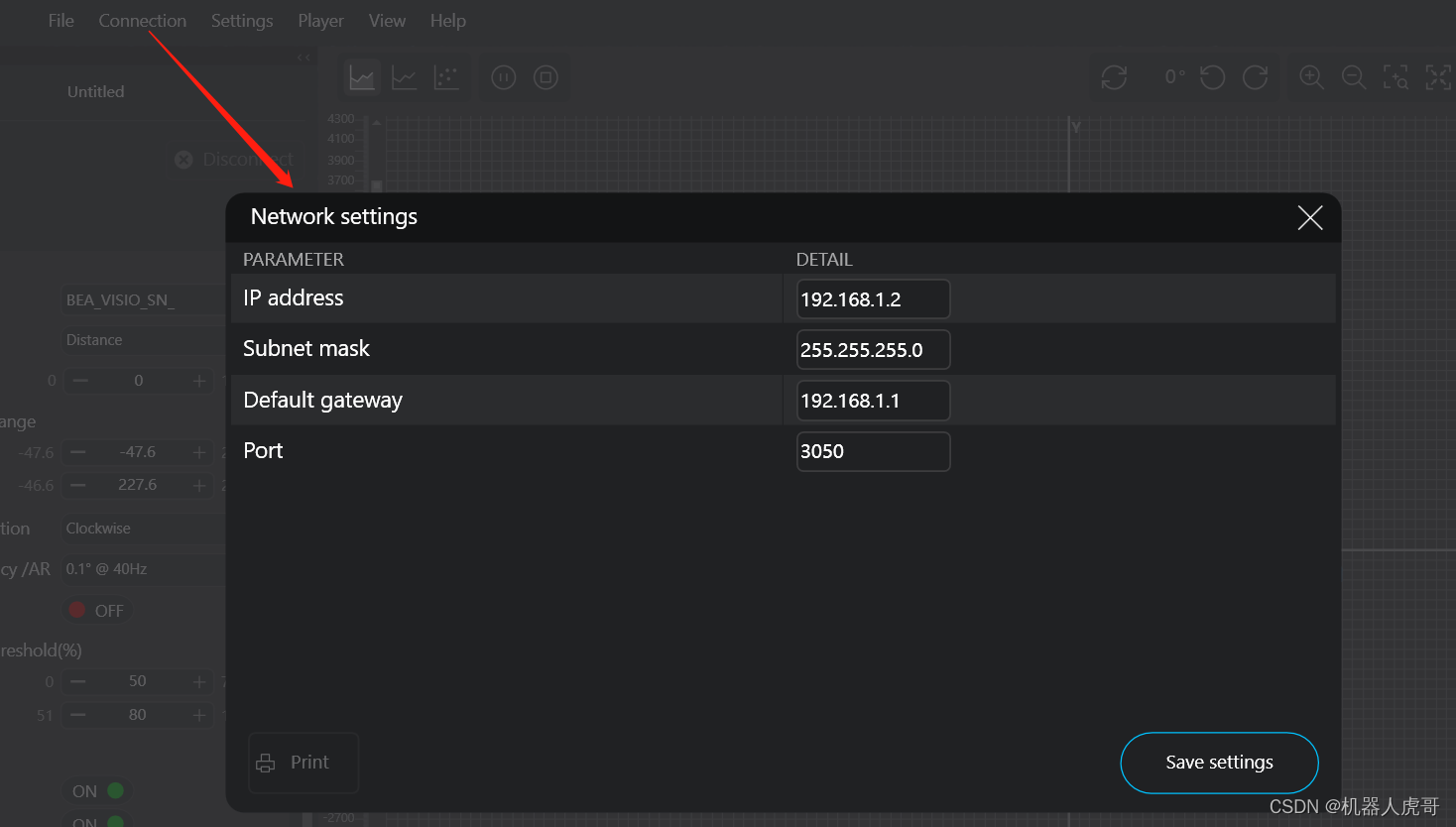
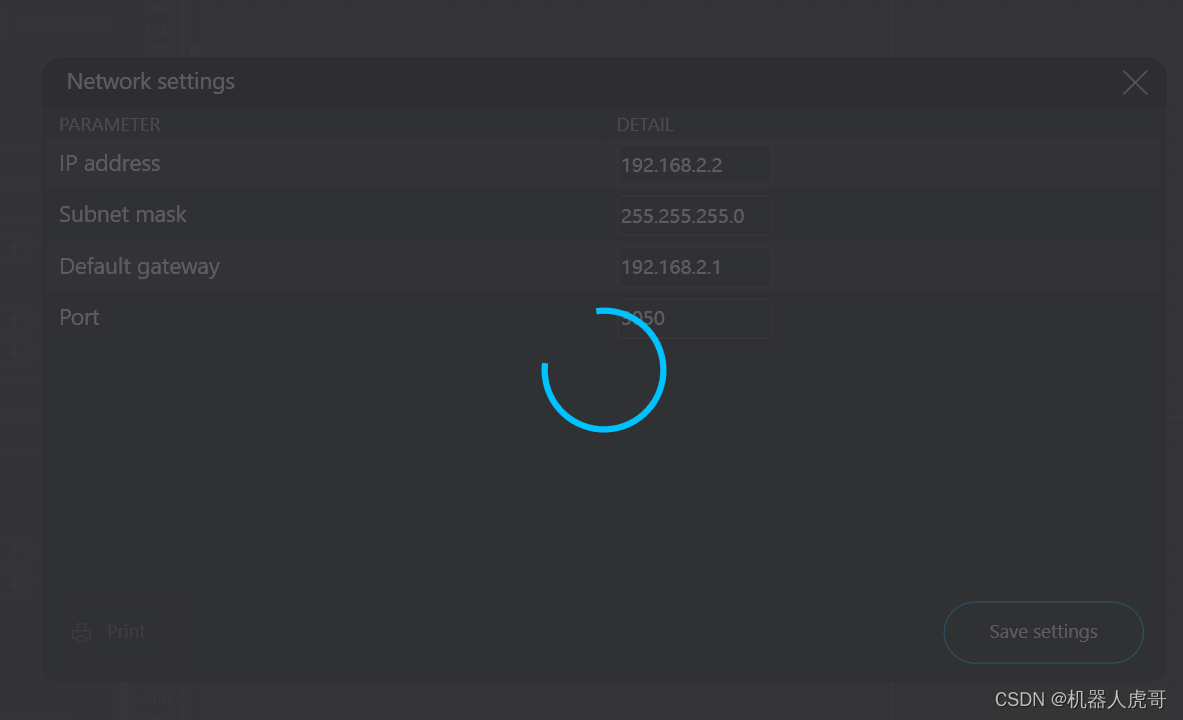
首先,网络信息配置窗口。
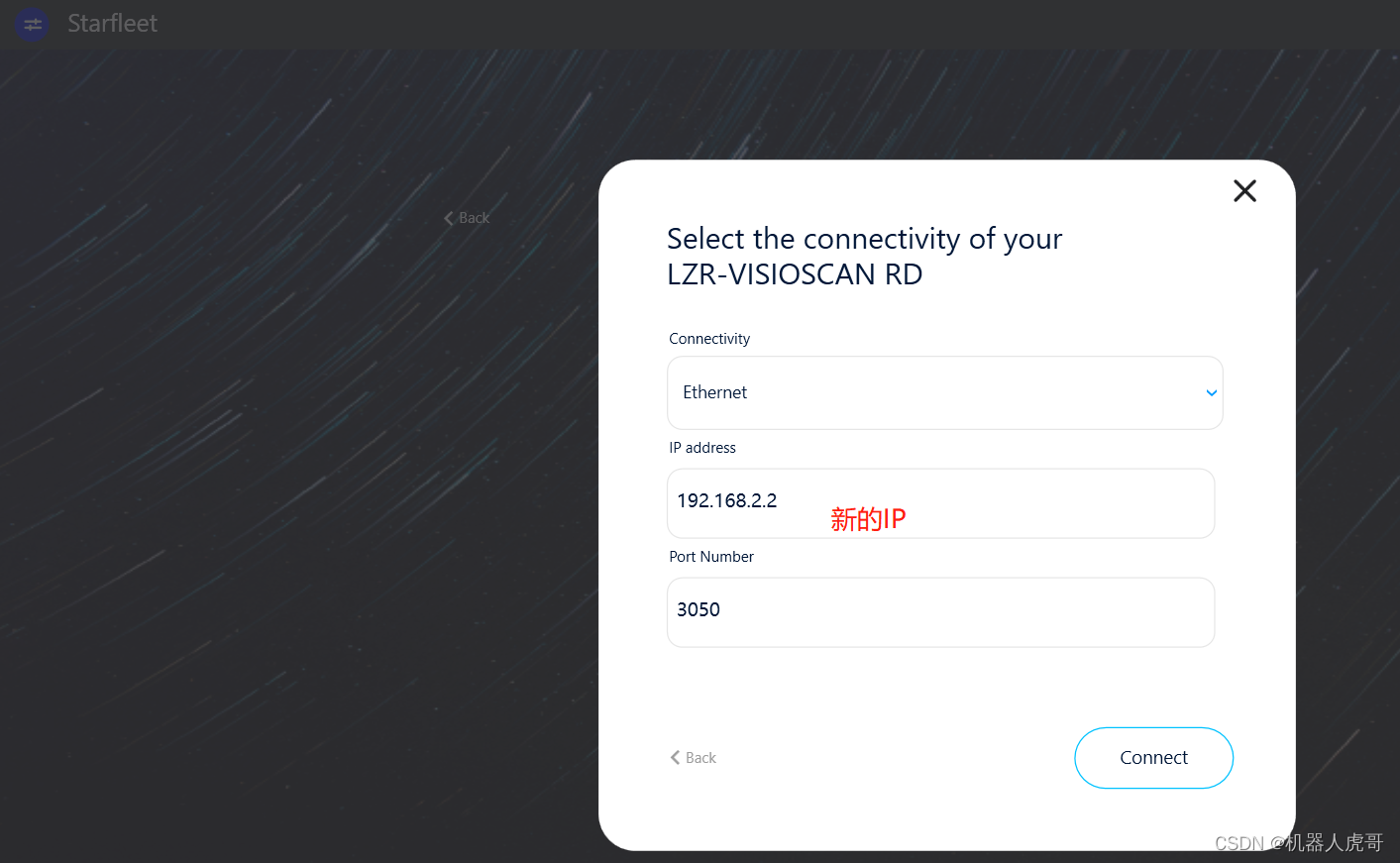
比如我们修改到2网段:
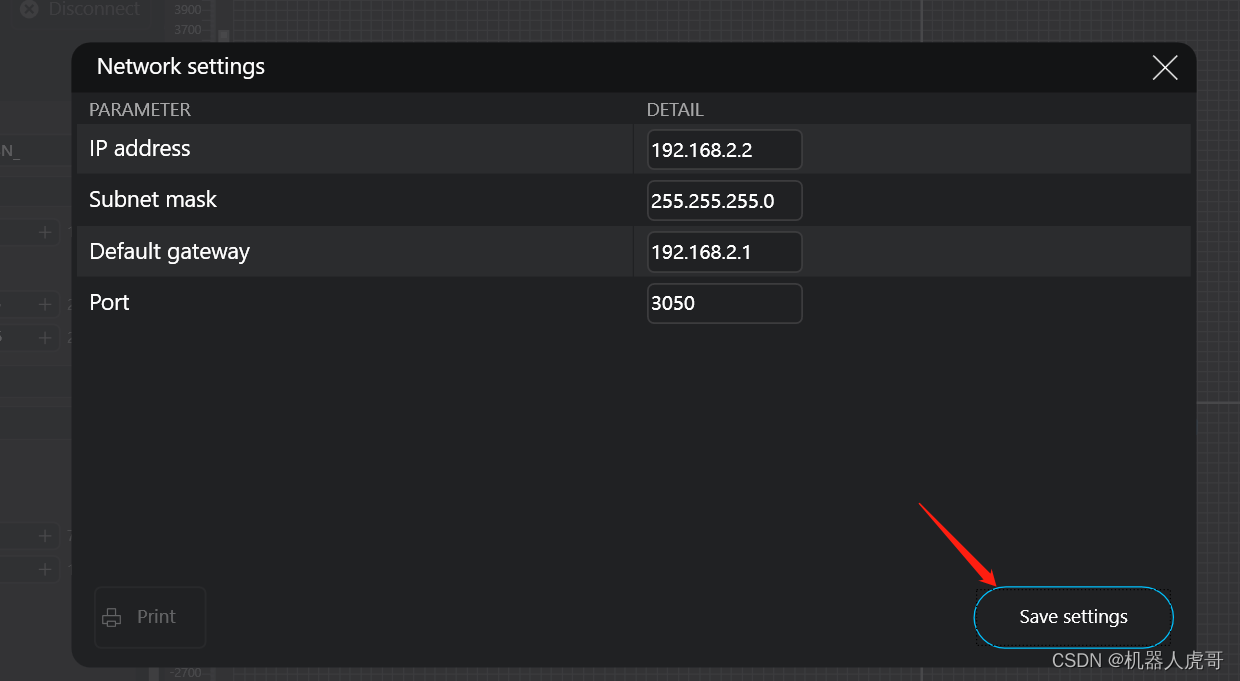
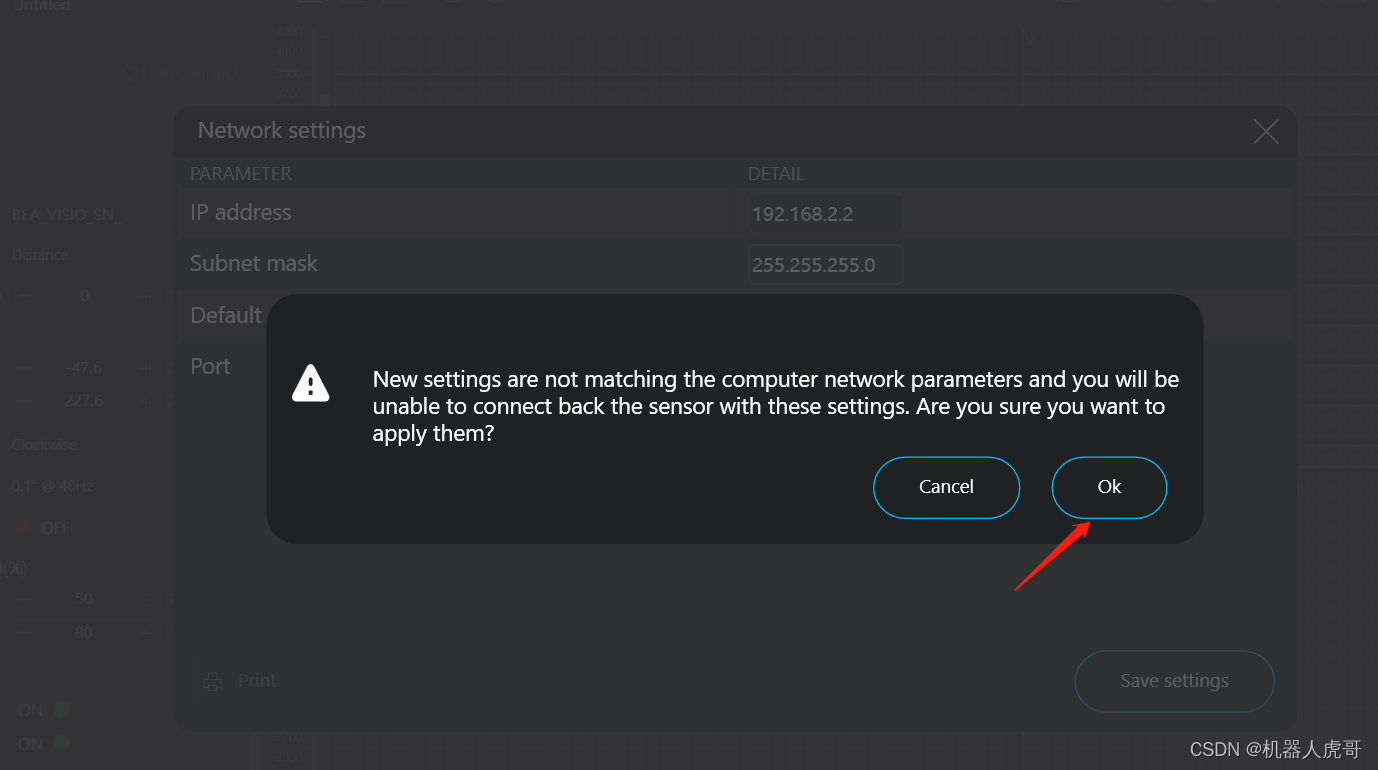
这个时候已经生效,所以需要我们修改自己的IP重新链接。
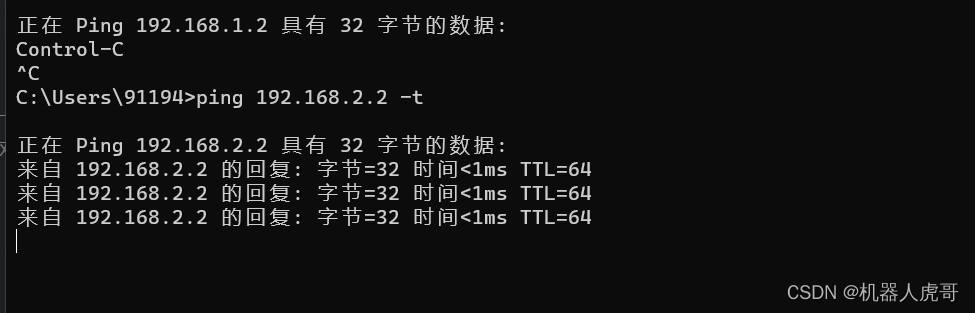
原来的IP已经无法ping通,我们修改自己的网卡IP至2网段。
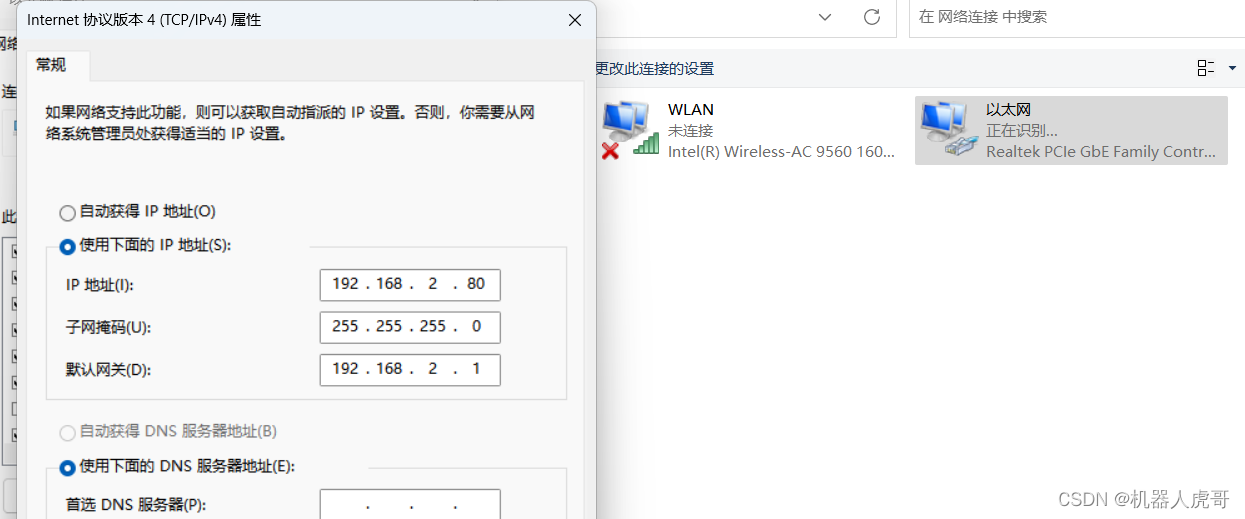
修改后使用新的IP可以ping 通。
重新链接软件看看。需要重新打开软件。

正常显示链接。整体修改IP还是比较快速的。
三、ROS下查看点云
上面WIN端,我们修改了IP信息,这里将雷达网口和测试主板链接到一起。ROS下的驱动找厂家既可以拿到。

A200是我自己设计的双网口,双CAN的TX1控制器,针对这种高频率的雷达,确实需要多个独立网口的设备,否则交换机一般真未必能抗住。废话不说了,进入系统。
3.0 设置雷达对应链接网口至同一网段IP
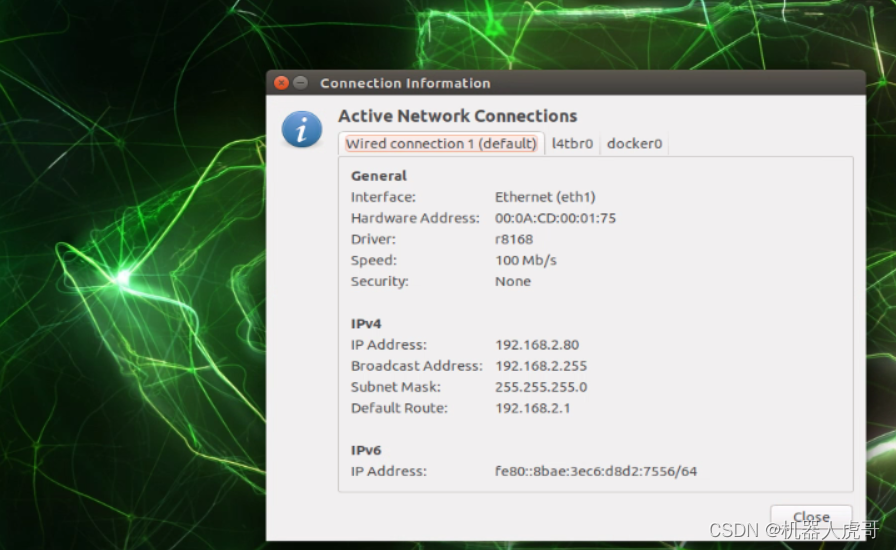
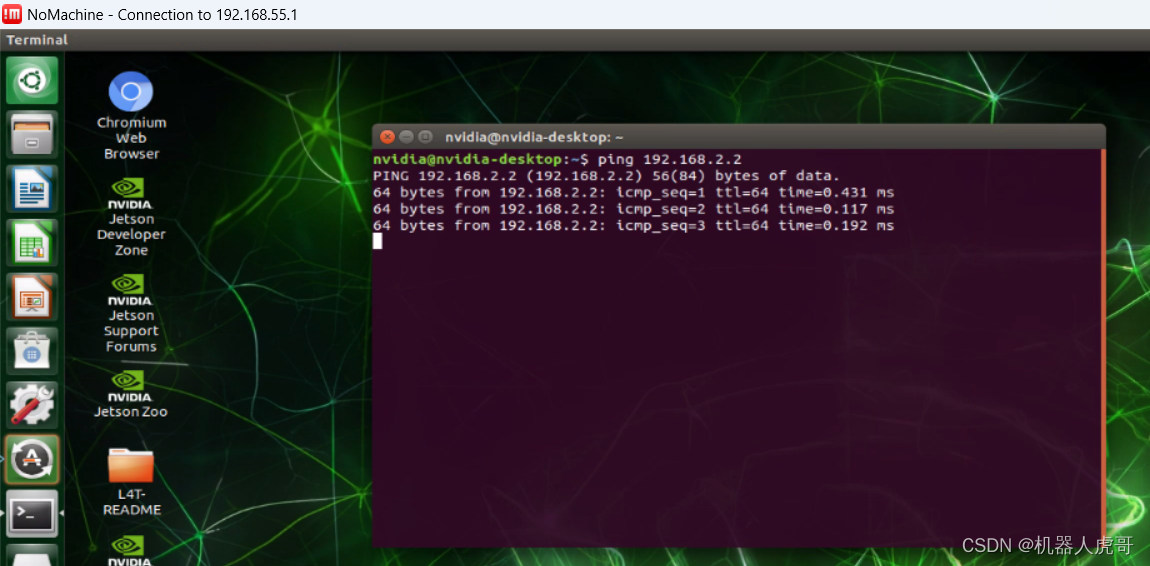
雷达和控制器正常可以互通。
3.1 建立工作空间
mkdir -p ~/SensorWS/BEA_ws/src
cd ~/SensorWS/BEA_ws/
catkin_make
source devel/setup.bash3.2 拷贝代码
#将官方提供的驱动代码包放置到这个目录解压
cd ~/SensorWS/BEA_ws/src
3.3 编译源码包
cd ~/SensorWS/BEA_ws
catkin_make --pkg visioscan_rd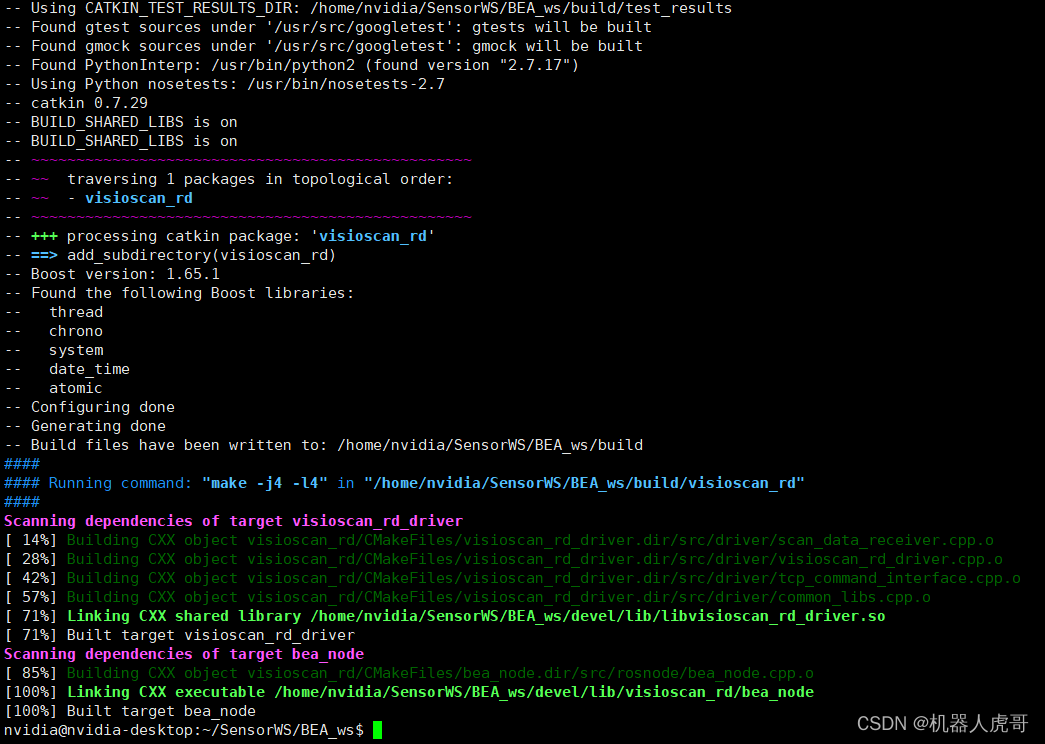
编译完成。
3.4 修改ROS 驱动启动脚本中对应的信息
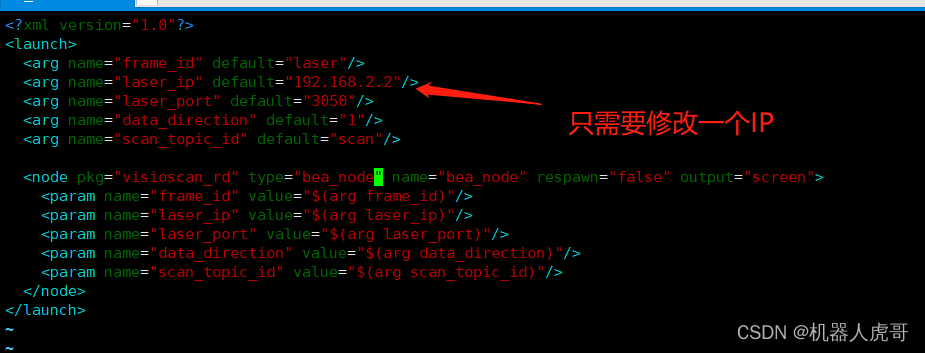
刚才我们根据需要已经修改了IP,接下来我们测试,需要使用脚本启动,需要修改脚本的对应IP信息。
cd ~/SensorWS/BEA_ws/src/visioscan_rd/launch脚本原始内容是:
<?xml version="1.0"?>
<launch>
<arg name="frame_id" default="laser"/>
<arg name="laser_ip" default="192.168.1.2"/>
<arg name="laser_port" default="3050"/>
<arg name="data_direction" default="1"/>
<arg name="scan_topic_id" default="scan"/>
<node pkg="visioscan_rd" type="bea_node" name="bea_node" respawn="false" output="screen">
<param name="frame_id" value="$(arg frame_id)"/>
<param name="laser_ip" value="$(arg laser_ip)"/>
<param name="laser_port" value="$(arg laser_port)"/>
<param name="data_direction" value="$(arg data_direction)"/>
<param name="scan_topic_id" value="$(arg scan_topic_id)"/>
</node>
</launch>
~ 修改其中的IP至雷达实际IP。
保存退出后我们就可以开始测试了。
3.6 启动驱动
cd ~/SensorWS/BEA_ws
source devel/setup.bash
#启动驱动
roslaunch visioscan_rd visioscan_rd.launch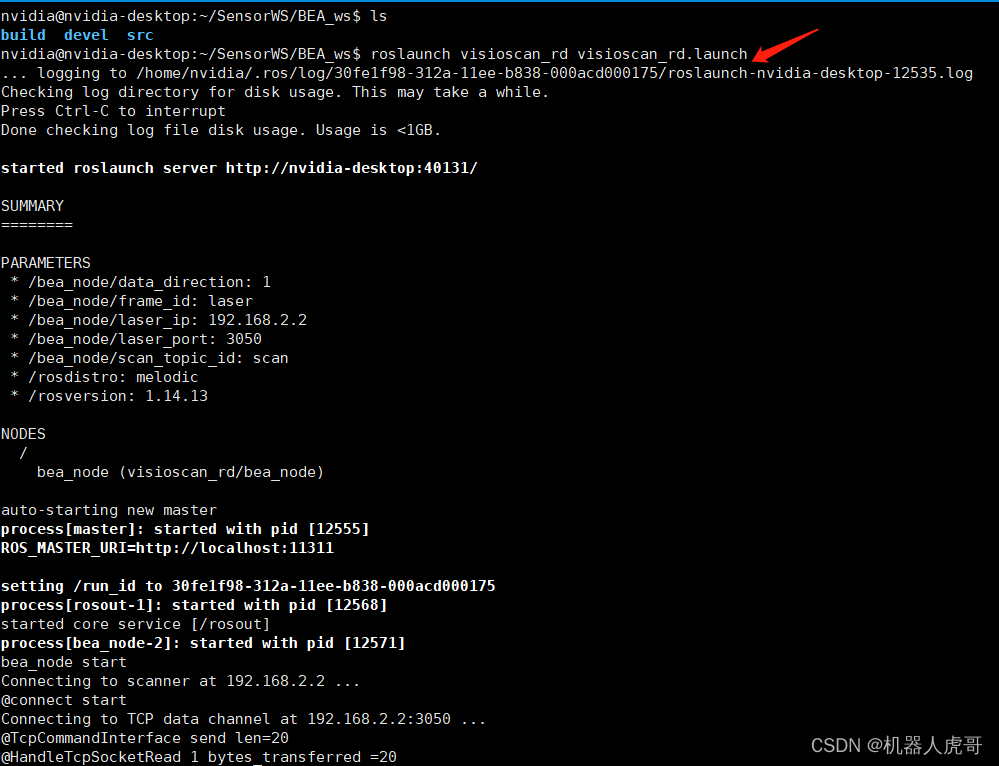
新启动一个终端,我们可以初步看看驱动的一些节点信息:
rosnode list
--------------------------------------------------------------------------------
/bea_node
/rosout
rosnode info /bea_node
--------------------------------------------------------------------------------
Node [/bea_node]
Publications:
* /rosout [rosgraph_msgs/Log]
* /scan [sensor_msgs/LaserScan]
Subscriptions: None
Services:
* /bea_node/get_loggers
* /bea_node/set_logger_level
contacting node http://nvidia-desktop:37727/ ...
Pid: 12571
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (53197 - 127.0.0.1:33242) [14]
* transport: TCPROS
rostopic echo /scan
--------------------------------------------------------------------------------
header:
seq: 27321
stamp:
secs: 1690977124
nsecs: 852644577
frame_id: "laser"
angle_min: -2.40157294273
angle_max: 2.40157294273
angle_increment: 0.00349065847695
time_increment: 0.0125000001863
scan_time: 0.0
range_min: 0.0
range_max: 25.0
后面的具体数据我就省略掉了。
rostopic hz /scan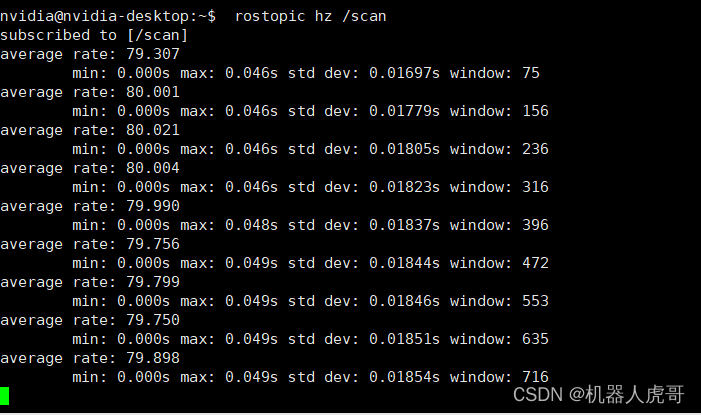
果然是80HZ,我们可以看看CPU占用。

CPU占用也还不错,没有大多少。
3.7 启动RVIZ查看点云
保持驱动是启动的情况下。我们使用nomachine链接到桌面,启动RVIZ。
rosrun rviz rviz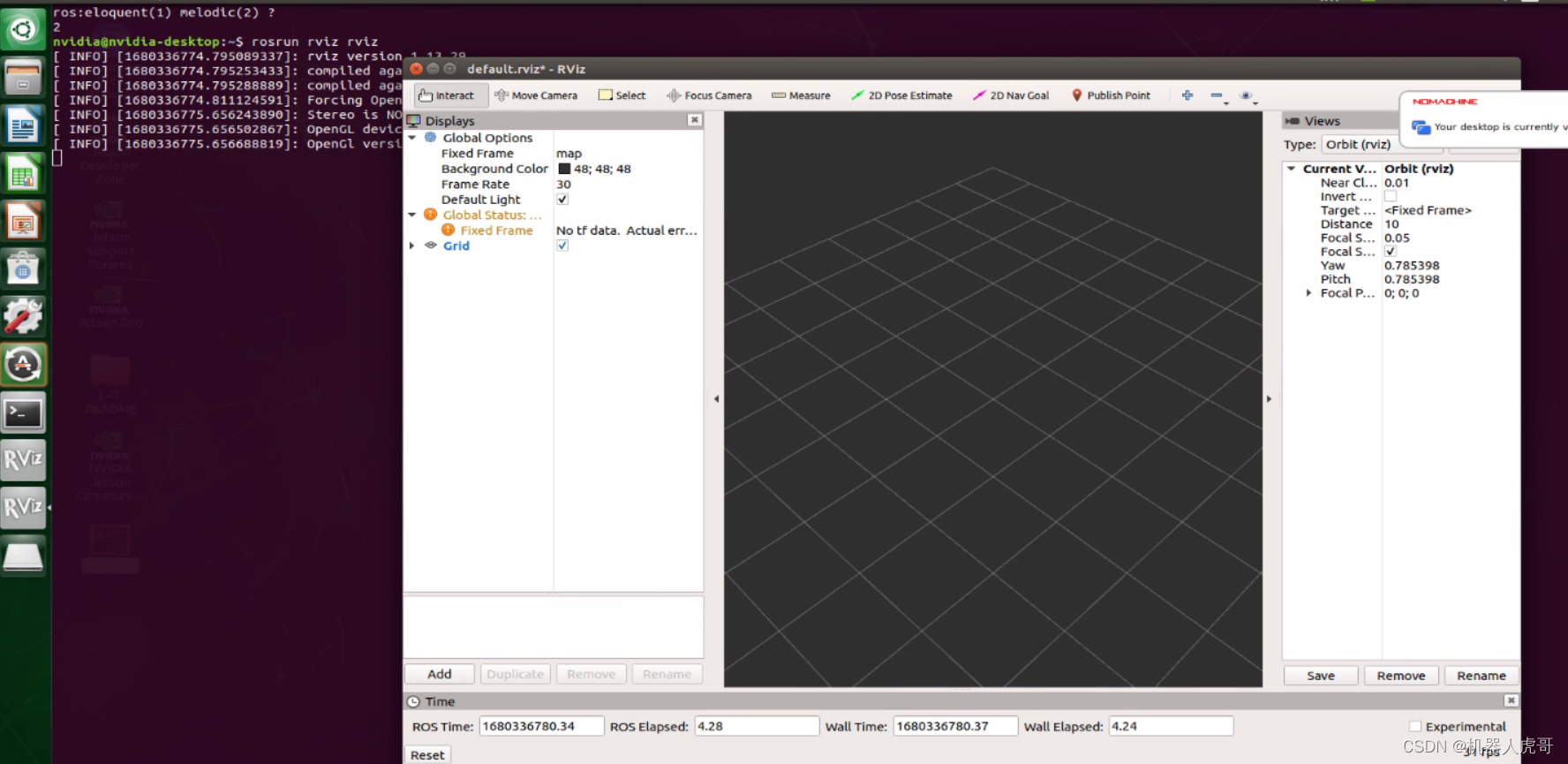
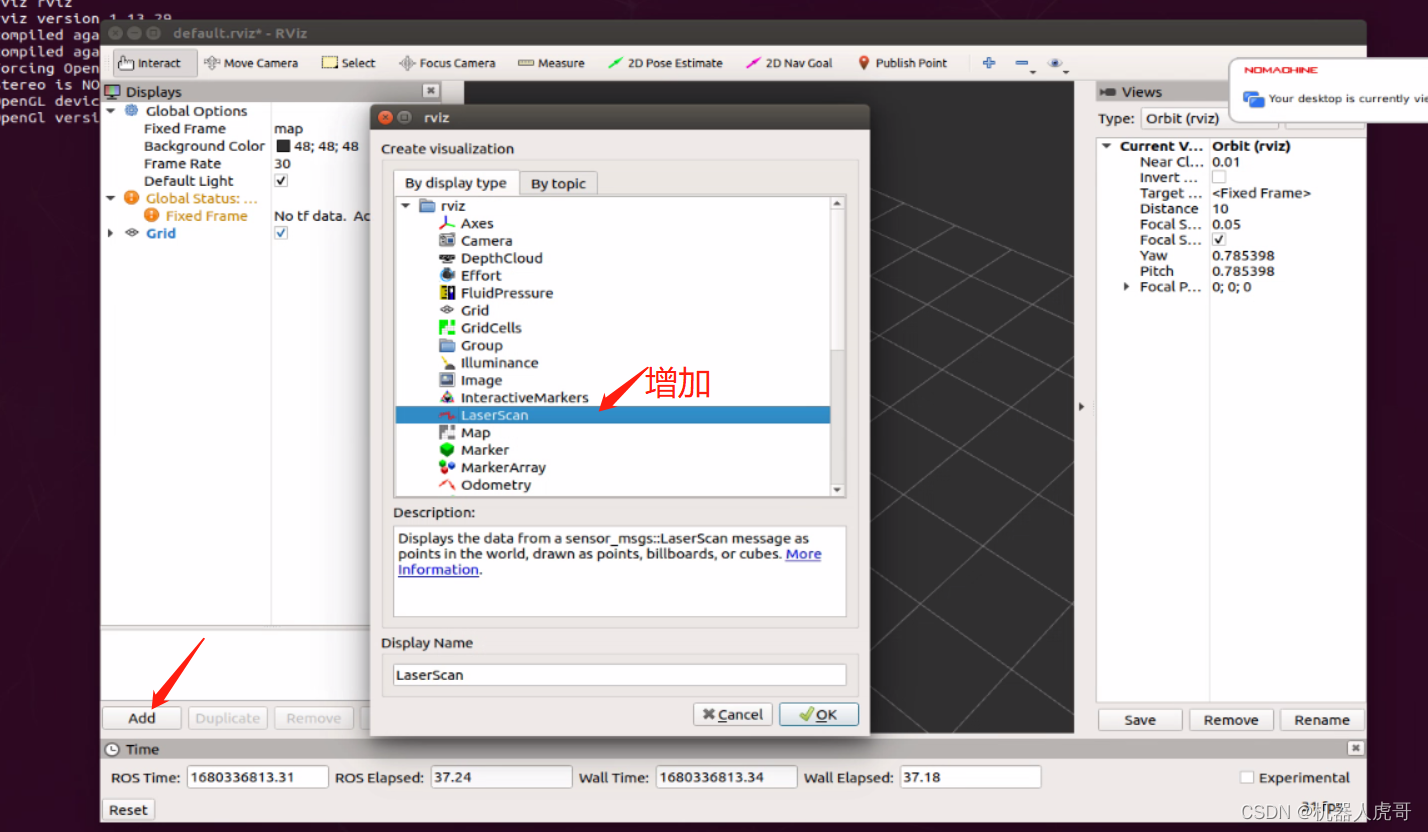
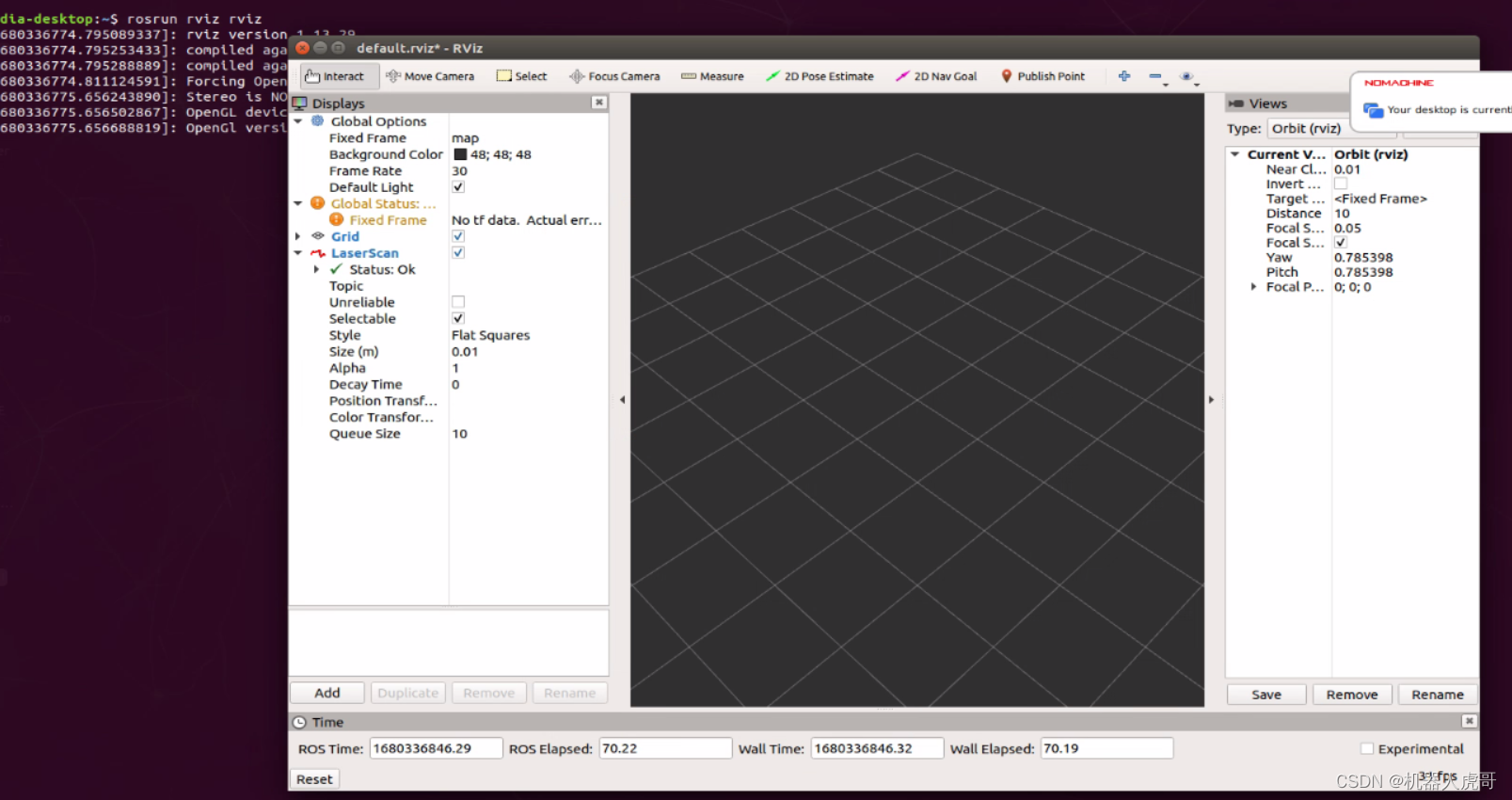
刚添加完毕,还不会有数据点云,需要做一下话题配置。
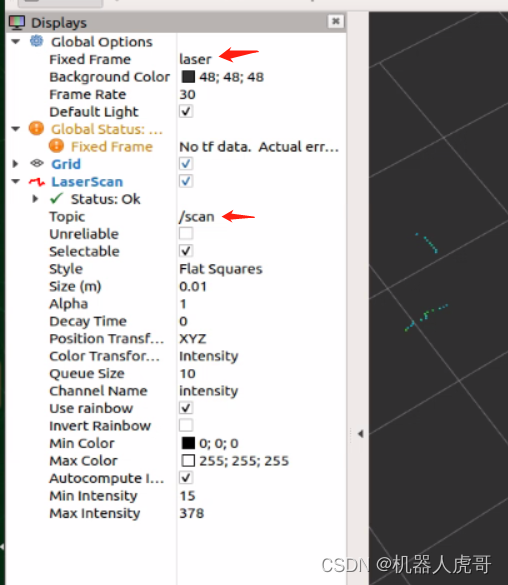
这样就可以看到激光数据了。数据确实挺稳的,禁止的时候你还以为死机了!哈哈。
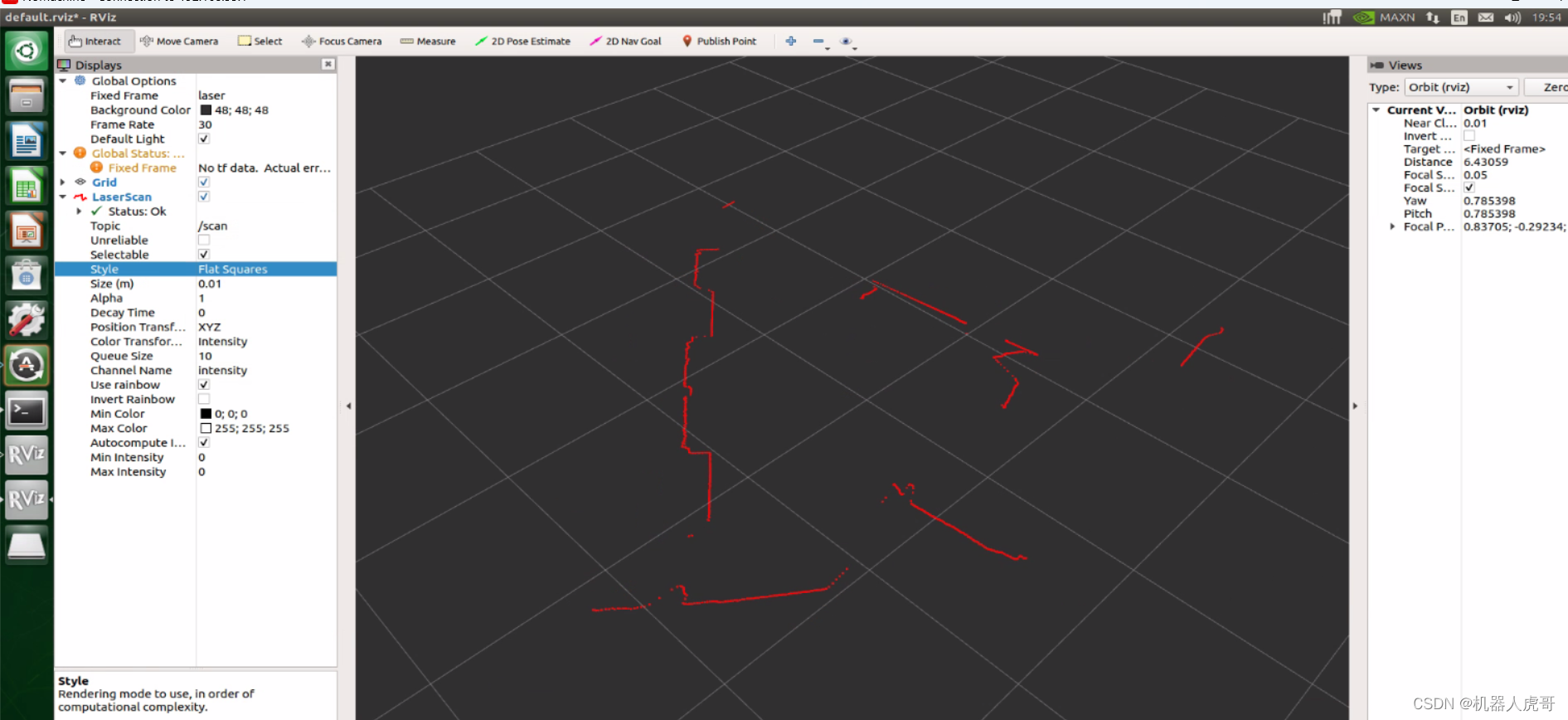
可以将这个配置保存,以便后期直接查看。
官方驱动里面也提供了配置好的,只需要直接使用RVIZ打开这个文件即可。
rosrun rviz rviz -d ~/SensorWS/BEA_ws/src/visioscan_rd/rviz/visioscan_rd.rviz
四、总结
整体我自己跑测试过程很顺利,也比较简单明白,没有那么多繁琐的配置。顺道说说VISIOSCAN的优势吧:
-
超高的扫描频率,40HZ和80HZ可选,这个参数真的很少见,尤其是在这个扫描频率下还可以保证最高0.1°的角度分辨率,这个难度还是有一点的。
-
超稳定的点云数据,静止不动的时候,你都感觉死机了!
-
最重要的,价格竟然也不高,性价比没得说,强烈推荐!五星好评**
纠错,疑问,交流: 911946883@qq.com