前言
NanoDet-Plus是超快速、高精度的轻量级无锚物体检测模型,github项目文件。可以在移动设备上实时检测。其主要特点是- 超轻量:模型文件仅980KB(INT8)、1.8MB(FP16)
- 超快:移动
ARM CPU上97fps(10.23ms) - 高精度:高达34.3 mAP val @0.5:0.95,并且在
CPU上仍然实时 - 训练友好:
GPU内存成本比其他模型低得多。 在GTX1060 6G上可设置batch_size=80 - 易于部署:支持各种后端,包括ncnn、MNN 和 OpenVINO。还提供基于ncnn推理框架的Android demo
NanoDet是一种FCOS风格的单阶段无锚目标检测模型,使用广义焦点损失作为分类和回归损失。在NanoDet-Plus中使用了新的标签分配策略,具有简单的分配指导模块(AGM)和动态软标签分配器(DSLA),以解决轻量级模型训练中的最佳标签分配问题。还引入了一个名为Ghost-PAN的轻量特征金字塔来增强多层特征融合。这些改进将之前NanoDet在COCO数据集上的检测精度提高了7 mAP。

-
关于
NanoDet-Plus模型框架的详细介绍可以参考文档,NanoDet模型框架的详细介绍可以参考文档 -
本文主要讲解如何训练
NanoDet-Plus模型,将训练好的模型转换为onnx格式,并使用onnxruntime进行推理
环境配置
- 本文使用的环境为云
GPU,基础镜像选择Python版本3.8,PyTorch版本1.13.1,Cuda版本11.7.0。GPU型号P4-8G - 一般云
GPU环境会提供学术镜像加速,在使用git克隆项目时记得打开,使用完以后关闭。以下命令均在命令行窗口执行
git clone https://github.com/RangiLyu/nanodet.git
cd nanodet
pip install -r requirements.txt
python setup.py develop
- 如果上述代码无报错,说明环境配置完成,接下来在项目文件夹下创建文件夹
data,用于存放训练数据
mkdir data
- 将图像文件放置于
./data/images下,注释文件放置于./data/ann下,注释文件有两个,分别是trainval.json、test.json,需要注意的是注释文件格式一定要是``coco`格式,怎么转换可以看我之前写的文章,里面有很详细的讲。
模型训练
配置文件解析
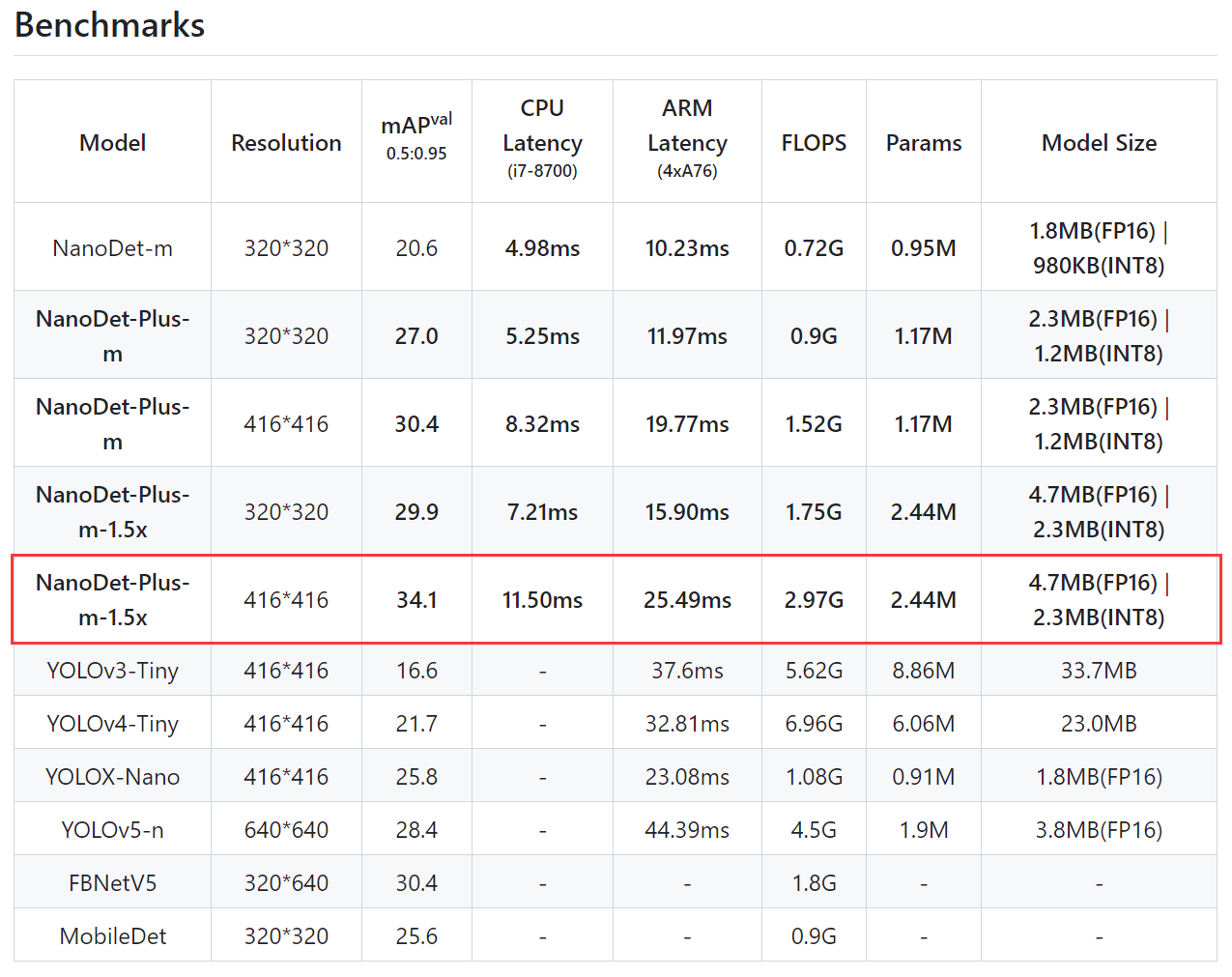
- 首先我们要找到我们想要微调的模型,打开项目文件夹中
README.md文档,可以看到在Benchmarks中有很多选项。 - 这里我们直接微调表中精度最高的模型NanoDet-Plus-m-1.5x,精度达到34.1 mAP val @0.5:0.95
-
进入
config文件夹,可以看到nanodet-plus-m-1.5x_416.yml文件,这就是模型配置文件。 -
下面我们对配置文件的各部分及参数做详细说明
Saving path
save_dir: workspace/nanodet-plus-m-1.5x_416
save_dir为保存日志和模型的位置。如果路径不存在,NanoDet-Plus将创建它。
Model
model:
arch:
name: NanoDetPlus
backbone: xxx
fpn: xxx
head: xxx
aux_head: xxx
大多数检测模型架构可以分为 3 个部分:backbone(主干)、head(任务头)和它们之间的fpn(连接器,例如 FPN、BiFPN、PAN)
Weight averaging
weight_averager:
name: ExpMovingAverager
decay: 0.9998
NanoDet-Plus支持EMA等权重平均法
Backbone
backbone:
name: ShuffleNetV2
model_size: 1.5x
out_stages: [2,3,4]
activation: LeakyReLU
NanoDet使用ShuffleNetV2作为骨干。可以修改model_size(模型大小)、out_stages(输出特征级别)和activation(激活函数)。- 此外,
NanoDet-Plus还提供其他轻量级主干网,如GhostNet和MobileNetV2。您还可以通过将其导入到nanodet/model/backbone/__init__.py中来添加骨干网络。
FPN
fpn:
name: GhostPAN
in_channels: [176, 352, 704]
out_channels: 128
kernel_size: 5
num_extra_level: 1
use_depthwise: True
activation: LeakyReLU
NanoDet-Plus使用GhostPAN作为连接器。in_channels:从主干提取的特征图通道列表。out_channels:输出特征图通道。
Head
head:
name: NanoDetPlusHead
num_classes: 80
input_channel: 128
feat_channels: 128
stacked_convs: 2
kernel_size: 5
strides: [8, 16, 32, 64]
activation: LeakyReLU
reg_max: 7
norm_cfg:
type: BN
loss:
loss_qfl:
name: QualityFocalLoss
use_sigmoid: True
beta: 2.0
loss_weight: 1.0
loss_dfl:
name: DistributionFocalLoss
loss_weight: 0.25
loss_bbox:
name: GIoULoss
loss_weight: 2.0
name: 任务头类名num_classes: 分类数量input_channel:输入特征图通道feat_channels:任务头转换的通道stacked_convs:一个任务头使用多少个转换块kernel_size:卷积核大小strides:每个特征图级别的下采样步长activation:激活函数reg_max:每级lrtb距离的最大值norm_cfg:归一化层设置loss:调整损失函数和权重
Auxiliary head
aux_head:
name: SimpleConvHead
num_classes: 80
input_channel: 256
feat_channels: 256
stacked_convs: 4
strides: [8, 16, 32, 64]
activation: LeakyReLU
reg_max: 7
Auxiliary head(辅助层)仅在训练期间起作用,参数含义与Head一致
Data
data:
train:
name: CocoDataset
img_path: coco/train2017
ann_path: coco/annotations/instances_train2017.json
input_size: [416,416] #[w,h]
keep_ratio: False
pipeline:
...
val:
...
- 在
data中,需要设置训练和验证数据集。name:数据集格式名称。您可以在nanodet/data/dataset中创建自己的数据集格式。input_size:[宽度,高度],keep_ratio:调整输入大小时是否保持原始图像比例,pipeline:数据预处理和增强管道
Device
device:
gpu_ids: [0]
workers_per_gpu: 10
batchsize_per_gpu: 96
precision: 32
gpu_ids:CUDA设备ID,对于多GPU训练,设置为 [0、1、2…]workers_per_gpu:每个GPU有多少个数据加载器进程batchsize_per_gpu:每个GPU在一个batch中处理的图像数量precision:训练精度,默认值 32 表示FP32训练。设置为 16 可启用AMP训练
Schedule
schedule:
optimizer:
name: AdamW
lr: 0.001
weight_decay: 0.05
warmup:
name: linear
steps: 500
ratio: 0.0001
total_epochs: 300
lr_schedule:
name: CosineAnnealingLR
T_max: 300
eta_min: 0.00005
val_intervals: 10
grad_clip: 35
-
optimizer:支持pytorch提供的所有优化器。 -
lr:遵循论文Accurate, Large Minibatch SGD: Training ImageNet in 1 Hour中的线性缩放规则根据batch_size调整lr -
warmup:训练前预热网络。支持constant,exp以及linear三种类型的预热。 -
total_epochs:训练的总epoch -
lr_schedule:学习率变化策略 -
val_intervals:训练期间评估间隔epoch -
grad_clip:梯度裁剪
Evaluator
evaluator:
name: CocoDetectionEvaluator
save_key: mAP
- 目前仅支持
coco eval。save_key:最佳模型的指标。支持mAP、AP50、AP75
Class names
- 用于可视化时标注
修改配置文件
- 将
nanodet-plus-m-1.5x_416.yml文件中的配置文件复制,然后根据任务需求进行更改,最后将其写入config文件夹中的nanodet-plus-m_416_animal.yml文件中 - 主要修改的地方有:
model模块下head的num_classes,aux_head的num_classes。data模块下的图片路径、注释文件路径。device模块下的batchsize_per_gpu。schedule模块下的lr(根据batch_size进行线性缩放)。total_epochs总epoch数。log模块下的interval日志输出iter间隔。class_names分类标签。 - 以下代码在jupyter notebook中运行,若直接创建新文件,只要两个
"""中间的内容
config_animal = """
save_dir: workspace/nanodet-plus-m-1.5x_416
model:
weight_averager:
name: ExpMovingAverager
decay: 0.9998
arch:
name: NanoDetPlus
detach_epoch: 10
backbone:
name: ShuffleNetV2
model_size: 1.5x
out_stages: [2,3,4]
activation: LeakyReLU
fpn:
name: GhostPAN
in_channels: [176, 352, 704]
out_channels: 128
kernel_size: 5
num_extra_level: 1
use_depthwise: True
activation: LeakyReLU
head:
name: NanoDetPlusHead
# 分类数,需要修改
num_classes: 2
input_channel: 128
feat_channels: 128
stacked_convs: 2
kernel_size: 5
strides: [8, 16, 32, 64]
activation: LeakyReLU
reg_max: 7
norm_cfg:
type: BN
loss:
loss_qfl:
name: QualityFocalLoss
use_sigmoid: True
beta: 2.0
loss_weight: 1.0
loss_dfl:
name: DistributionFocalLoss
loss_weight: 0.25
loss_bbox:
name: GIoULoss
loss_weight: 2.0
# Auxiliary head, only use in training time.
aux_head:
name: SimpleConvHead
# 分类数需要更改
num_classes: 2
input_channel: 256
feat_channels: 256
stacked_convs: 4
strides: [8, 16, 32, 64]
activation: LeakyReLU
reg_max: 7
data:
train:
name: CocoDataset
# 训练集图片路径、注释文件路径
img_path: data/images
ann_path: data/annotations/trainval.json
input_size: [416,416] #[w,h]
keep_ratio: False
pipeline:
perspective: 0.0
scale: [0.6, 1.4]
stretch: [[0.8, 1.2], [0.8, 1.2]]
rotation: 0
shear: 0
translate: 0.2
flip: 0.5
brightness: 0.2
contrast: [0.6, 1.4]
saturation: [0.5, 1.2]
normalize: [[103.53, 116.28, 123.675], [57.375, 57.12, 58.395]]
val:
name: CocoDataset
# 验证集图片路径、注释文件路径
img_path: data/images
ann_path: data/annotations/test.json
input_size: [416,416] #[w,h]
keep_ratio: False
pipeline:
normalize: [[103.53, 116.28, 123.675], [57.375, 57.12, 58.395]]
device:
gpu_ids: [0]
workers_per_gpu: 2
batchsize_per_gpu: 96
precision: 32 # set to 16 to use AMP training
schedule:
optimizer:
name: AdamW
# 学习率等比例缩放
lr: 0.001
weight_decay: 0.05
warmup:
# 学习率预热step
name: linear
steps: 500
ratio: 0.0001
# 总epochs
total_epochs: 300
lr_schedule:
name: CosineAnnealingLR
T_max: 300
eta_min: 0.00005
# 验证间隔epoch
val_intervals: 5
# 梯度修剪
grad_clip: 35
evaluator:
name: CocoDetectionEvaluator
# 最优指标
save_key: mAP
# 日志输出iter间隔
log:
interval: 20
# 分类名,需要与标准文件中的id顺序一直
class_names: ['cat', 'dog']
"""
#------------------------------------------------------
config=f'./config/nanodet-plus-m_416_animal.yml'
with open(config, 'w') as f:
f.write(config_animal)
启动训练
- 本节代码均在命令行窗口中运行
python tools/train.py ./config/nanodet-plus-m_416_animal.yml
- 由于训练日志太长,这里就不展示了,这一步只要不报错,等待训练结束即可。
save_dir目录下的model_best文件夹中 - 训练结束以后可以使用
TensorBoard对训练过程进行可视化
cd workspace/nanodet-plus-m-1.5x_416
tensorboard --logdir ./
ONNXRuntime部署
- 注:本节所有代码均在命令行窗口中运行
模型导出ONNX
- 导出
onnx模型,运行tools/export_onnx.py脚本就可以快速转换,运行完成后会在项目文件夹下生成nanodet.onnx文件。 - 我们将精度最高的模型权重进行转换
python tools/export_onnx.py --cfg_path ./config/nanodet-plus-m_416_animal.yml --model_path workspace/nanodet-plus-m-1.5x_416/model_best/nanodet_model_best.pth
ONNX模型推理
- 因为模型转换为
ONNX后输出结果发生了很大变化,并且有点不那么好理解,这里放一篇博客,里面对输出结果做了很详细的说明,用opencv部署nanodet目标检测 - 该博主在
github上发布了使用OpenCV部署NanoDet-Plus,包含C++和Python两个版本的程序。使用ONNXRuntime部署NanoDet-Plus,包含C++和Python两个版本的程序。项目地址 - 打开项目主页,下载
onnxruntime/main.py文件到项目文件夹下,打开文件,修改部分代码
import cv2
import numpy as np
import argparse
import onnxruntime as ort
import math
class my_nanodet():
def __init__(self, model_pb_path, prob_threshold=0.4, iou_threshold=0.3):
self.classes = ['cat', 'dog']
self.num_classes = len(self.classes)
self.prob_threshold = prob_threshold
self.iou_threshold = iou_threshold
### normalize: [[103.53, 116.28, 123.675], [57.375, 57.12, 58.395]]
self.mean = np.array([103.53, 116.28, 123.675], dtype=np.float32).reshape(1, 1, 3)
self.std = np.array([57.375, 57.12, 58.395], dtype=np.float32).reshape(1, 1, 3)
so = ort.SessionOptions()
so.log_severity_level = 3
self.net = ort.InferenceSession(model_pb_path, so)
self.input_shape = (self.net.get_inputs()[0].shape[2], self.net.get_inputs()[0].shape[3])
self.reg_max = int((self.net.get_outputs()[0].shape[-1] - self.num_classes) / 4) - 1
self.project = np.arange(self.reg_max + 1)
self.strides = (8, 16, 32, 64)
self.mlvl_anchors = []
for i in range(len(self.strides)):
anchors = self._make_grid(
(math.ceil(self.input_shape[0] / self.strides[i]), math.ceil(self.input_shape[1] / self.strides[i])),
self.strides[i])
self.mlvl_anchors.append(anchors)
self.keep_ratio = False
def _make_grid(self, featmap_size, stride):
feat_h, feat_w = featmap_size
shift_x = np.arange(0, feat_w) * stride
shift_y = np.arange(0, feat_h) * stride
xv, yv = np.meshgrid(shift_x, shift_y)
xv = xv.flatten()
yv = yv.flatten()
return np.stack((xv, yv), axis=-1)
# cx = xv + 0.5 * (stride - 1)
# cy = yv + 0.5 * (stride - 1)
# return np.stack((cx, cy), axis=-1)
def softmax(self, x, axis=1):
x_exp = np.exp(x)
# 如果是列向量,则axis=0
x_sum = np.sum(x_exp, axis=axis, keepdims=True)
s = x_exp / x_sum
return s
def _normalize(self, img):
img = img.astype(np.float32)
# img = (img / 255.0 - self.mean / 255.0) / (self.std / 255.0)
img = (img - self.mean) / (self.std)
return img
def resize_image(self, srcimg, keep_ratio=True):
top, left, newh, neww = 0, 0, self.input_shape[0], self.input_shape[1]
if keep_ratio and srcimg.shape[0] != srcimg.shape[1]:
hw_scale = srcimg.shape[0] / srcimg.shape[1]
if hw_scale > 1:
newh, neww = self.input_shape[0], int(self.input_shape[1] / hw_scale)
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
left = int((self.input_shape[1] - neww) * 0.5)
img = cv2.copyMakeBorder(img, 0, 0, left, self.input_shape[1] - neww - left, cv2.BORDER_CONSTANT,
value=0) # add border
else:
newh, neww = int(self.input_shape[0] * hw_scale), self.input_shape[1]
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
top = int((self.input_shape[0] - newh) * 0.5)
img = cv2.copyMakeBorder(img, top, self.input_shape[0] - newh - top, 0, 0, cv2.BORDER_CONSTANT, value=0)
else:
img = cv2.resize(srcimg, self.input_shape, interpolation=cv2.INTER_AREA)
return img, newh, neww, top, left
def post_process(self, preds, scale_factor=1, rescale=False):
mlvl_bboxes = []
mlvl_scores = []
ind = 0
for stride, anchors in zip(self.strides, self.mlvl_anchors):
cls_score, bbox_pred = preds[ind:(ind + anchors.shape[0]), :self.num_classes], preds[ind:(ind + anchors.shape[0]), self.num_classes:]
ind += anchors.shape[0]
bbox_pred = self.softmax(bbox_pred.reshape(-1, self.reg_max + 1), axis=1)
# bbox_pred = np.sum(bbox_pred * np.expand_dims(self.project, axis=0), axis=1).reshape((-1, 4))
bbox_pred = np.dot(bbox_pred, self.project).reshape(-1, 4)
bbox_pred *= stride
# nms_pre = cfg.get('nms_pre', -1)
nms_pre = 1000
if nms_pre > 0 and cls_score.shape[0] > nms_pre:
max_scores = cls_score.max(axis=1)
topk_inds = max_scores.argsort()[::-1][0:nms_pre]
anchors = anchors[topk_inds, :]
bbox_pred = bbox_pred[topk_inds, :]
cls_score = cls_score[topk_inds, :]
bboxes = self.distance2bbox(anchors, bbox_pred, max_shape=self.input_shape)
mlvl_bboxes.append(bboxes)
mlvl_scores.append(cls_score)
mlvl_bboxes = np.concatenate(mlvl_bboxes, axis=0)
if rescale:
mlvl_bboxes /= scale_factor
mlvl_scores = np.concatenate(mlvl_scores, axis=0)
bboxes_wh = mlvl_bboxes.copy()
bboxes_wh[:, 2:4] = bboxes_wh[:, 2:4] - bboxes_wh[:, 0:2] ####xywh
classIds = np.argmax(mlvl_scores, axis=1)
confidences = np.max(mlvl_scores, axis=1) ####max_class_confidence
indices = cv2.dnn.NMSBoxes(bboxes_wh.tolist(), confidences.tolist(), self.prob_threshold,
self.iou_threshold).flatten()
if len(indices) > 0:
mlvl_bboxes = mlvl_bboxes[indices]
confidences = confidences[indices]
classIds = classIds[indices]
return mlvl_bboxes, confidences, classIds
else:
print('nothing detect')
return np.array([]), np.array([]), np.array([])
def distance2bbox(self, points, distance, max_shape=None):
x1 = points[:, 0] - distance[:, 0]
y1 = points[:, 1] - distance[:, 1]
x2 = points[:, 0] + distance[:, 2]
y2 = points[:, 1] + distance[:, 3]
if max_shape is not None:
x1 = np.clip(x1, 0, max_shape[1])
y1 = np.clip(y1, 0, max_shape[0])
x2 = np.clip(x2, 0, max_shape[1])
y2 = np.clip(y2, 0, max_shape[0])
return np.stack([x1, y1, x2, y2], axis=-1)
def detect(self, srcimg):
img, newh, neww, top, left = self.resize_image(srcimg, keep_ratio=self.keep_ratio)
img = self._normalize(img)
blob = np.expand_dims(np.transpose(img, (2, 0, 1)), axis=0)
outs = self.net.run(None, {self.net.get_inputs()[0].name: blob})[0].squeeze(axis=0)
det_bboxes, det_conf, det_classid = self.post_process(outs)
# results = []
ratioh, ratiow = srcimg.shape[0] / newh, srcimg.shape[1] / neww
for i in range(det_bboxes.shape[0]):
xmin, ymin, xmax, ymax = max(int((det_bboxes[i, 0] - left) * ratiow), 0), max(
int((det_bboxes[i, 1] - top) * ratioh), 0), min(
int((det_bboxes[i, 2] - left) * ratiow), srcimg.shape[1]), min(int((det_bboxes[i, 3] - top) * ratioh),
srcimg.shape[0])
# results.append((xmin, ymin, xmax, ymax, self.classes[det_classid[i]], det_conf[i]))
cv2.rectangle(srcimg, (xmin, ymin), (xmax, ymax), (0, 0, 255), thickness=1)
print(self.classes[det_classid[i]] + ': ' + str(round(det_conf[i], 3)))
cv2.putText(srcimg, self.classes[det_classid[i]] + ': ' + str(round(det_conf[i], 3)), (xmin, ymin - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), thickness=1)
cv2.imwrite('result.jpg', srcimg)
return srcimg
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--imgpath', type=str, default='imgs/person.jpg', help="image path")
parser.add_argument('--modelpath', type=str, default='onnxmodel/nanodet-plus-m_320.onnx', help="onnx filepath")
parser.add_argument('--confThreshold', default=0.4, type=float, help='class confidence')
parser.add_argument('--nmsThreshold', default=0.6, type=float, help='nms iou thresh')
args = parser.parse_args()
srcimg = cv2.imread(args.imgpath)
net = my_nanodet(args.modelpath, args.classfile, prob_threshold=args.confThreshold, iou_threshold=args.nmsThreshold)
srcimg = net.detect(srcimg)
- 修改的地方有:删除了
classfile参数,改为直接手动输入self.classes = ['cat', 'dog']。删除modelpath参数中的choices键。因为是在命令行窗口中运行,所以删除cv2.namedWindow操作。取消注释cv2.imwrite('result.jpg', srcimg)推理完成生成可视化图片。 - 修改完成一定要记得保存文件后再关闭文件,否则修改无效,会报错
imgpath参数设定为需要推理的照片,modelpath为我们自己导出的ONNX模型nanodet.onnx
python main.py --imgpath ./data/images/00001.png --modelpath ./workspace/nanodet-plus-m-1.5x_416/model_best/nanodet_model_best.pth
- 运行完成后会在项目文件夹下生成
result.jpg文件