以下为正文:
1、求推力(F)的公式
式中:
F — 推力(激振力)(N)
m0 — 振动台运动部分有效质量(kg)
m1 — 辅助台面质量(kg)
m2 — 试件(包括夹具、安装螺钉)质量(kg)
A — 试验加速度(m/s²)
2、加速度(A)、速度(V)、位移(D)三个振动参数的互换运算公式
式中:
A — 试验加速度(m/s²)
V — 试验速度(m/s)
ω — 角速度,ω=2πf
f — 试验频率(Hz)
式中:
V — 试验速度(m/s)
D — 位移(mm,0-P)单峰值
ω — 角速度,ω=2πf
f — 试验频率(Hz)
式中:
A — 试验加速度(m/s²)
D — 位移(mm,0-P)单峰值
ω — 角速度,ω=2πf
f — 试验频率(Hz)
上式亦可简化为:
式中:
A — 试验加速度(g,1g=9.8m/s²)
D — 位移(mm,0-P)单峰值
f — 试验频率(Hz)
上式也可以改写为:
A — 试验加速度(m/s²)
D — 位移(mm,0-P)单峰值
f — 试验频率(Hz)
3、定振级扫频试验平滑交越点频率的计算公式
(1) 加速度与速度平滑交越点频率的计算公式
式中:
fA-V — 加速度与速度平滑交越点频率(Hz)
A — 试验加速度(m/s²)
V — 试验速度(m/s)
(2) 速度与位移平滑交越点频率的计算公式
式中:
VD-f — 加速度与速度平滑交越点频率(Hz)
V — 试验速度(m/s)
D — 位移(mm,0-P)单峰值
(3) 加速度与位移平滑交越点频率的计算公式
式中:
fA-D — 加速度与位移平滑交越点频率(Hz)
A — 试验加速度(m/s²)
D — 位移(mm,0-P)单峰值
上式可以简化为:
4、扫描时间和扫描速率的计算公式
(1) 线性扫描比较简单:
式中:
S1 — 扫描时间(s或min)
fH-fL — 扫描宽带,其中fH为上限频率,fL为下限频率(Hz)
V1 — 扫描速率(Hz/min 或Hz/s)
(2) 对数扫频
倍频程的计算公式:
式中:
n — 倍频程(oct)
fH — 上限频率(Hz)
fL — 下限频率(Hz)
扫描速率计算公式:
式中:
R — 扫描速率(oct/min或s)
fH — 上限频率(Hz)
fL — 下限频率(Hz)
T — 扫描时间(min或s)
扫描时间计算公式:
式中:
T — 扫描时间(min或s)
n — 倍频程(oct)
R — 扫描速率(oct/min 或oct/s)
5、随机振动试验常用的计算公式
(1) 频率分辨力计算公式:
式中:
△f — 频率分辨力(Hz)
fmax — 最高控制频率(Hz)
N — 谱线数(线数)
fmax是△f的整倍数
(2) 随机振动加速度总均方根值的计算
A、利用升谱和降谱以及平直谱计算公式
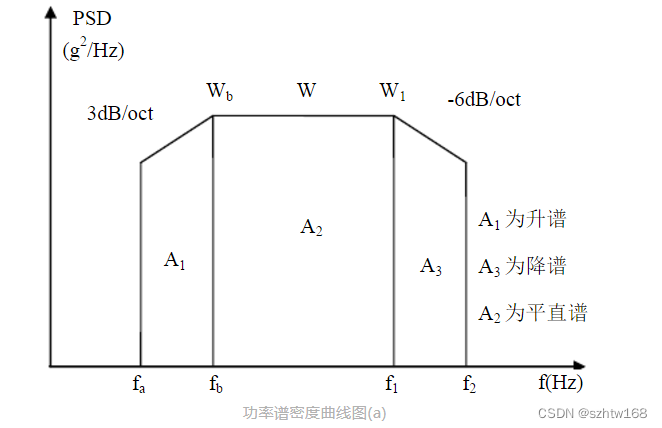
平直谱计算公式:
升谱计算公式:
降谱计算公式:
式中:m=N/3,N为谱线的斜率(dB/octive)。
若N=3,则m=1时,必须采用以下降谱计算公式:
加速度总均方根值:
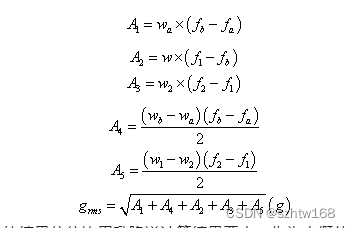
B、利用平直谱计算公式:计算加速度总均方根值
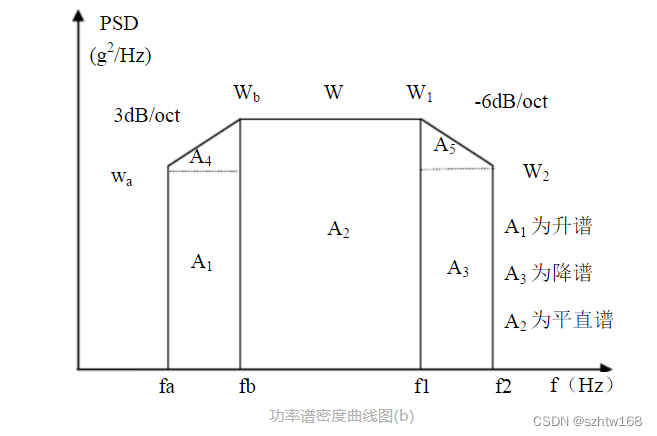
功率谱密度曲线图(b)
为了简便起见,往往将功率谱密度曲线图划分成若干矩形和三角形,并利用上升斜率(如3dB/oct)和下降斜率(如-6dB/oct)分别算出wa和w2,然后求各个几何形状的面积与面积和,再开方求出加速度总均方根值:
注意:第二种计算方法的结果往往比用升降谱计算结果要大,作为大概估算可用,但要精确计算就不能用。
(3) 已知加速度总均方根g(rms)值,求加速度功率谱密度公式
(4) 求Xp-p最大的峰峰位移(mm)计算公式
准确的方法应该找出位移谱密度曲线,计算出均方根位移值,再将均方根位移乘以三倍得出最大峰值位移(如果位移谱密度是曲线,则必须积分才能计算)。在工程上往往只要估计一个大概的值。这里介绍一个简单的估算公式
式中:
Xp-p — 最大的峰峰位移(mm,p-p)
fo — 为下限频率(Hz)
wo — 为下限频率(fo)处的PSD值(g²/Hz)
(5) 求加速度功率谱密度斜率(dB/oct)公式
式中:n为oct dvr倍频程
wH — 频率fH处的加速度功率谱密度值(g²/Hz)
wL — 频率fL处的加速度功率谱密度值(g²/Hz)