在ORB-SLAM3运行EuRoC和TUM-VI数据集并作以评价。EuRoC利用微型飞行器(MAV ) 收集的视觉惯性数据集,TUM-VI 是由实验人员手持视觉-惯性传感器收集的数据集。这两个是在视觉SLAM中比较常用的公开数据集,所以测试并加以记录。
文章目录
- 一、EuRoC数据集测试
- 1、EuRoC官网下载
- 2、新建路径
- 3、将数据集拷贝至对应路径
- 4、修改文件,显示图像化界面
- 5、ORB_SLAM3路径下执行命令
- 6、效果展示
- 二、TUM-VI数据集测试
一、EuRoC数据集测试
1、EuRoC官网下载
从官网下载Euroc数据集,ASL格式

2、新建路径
在ORB_SLAM3的路径下新建一个dateset的文件夹,里面再建一个名为MH01的文件夹,最后将下载好的数据集解压到MH01内

3、将数据集拷贝至对应路径
MH01解压后文件名为mav0,在dataset文件夹中新建MH01文件夹,将mav0拷贝放入

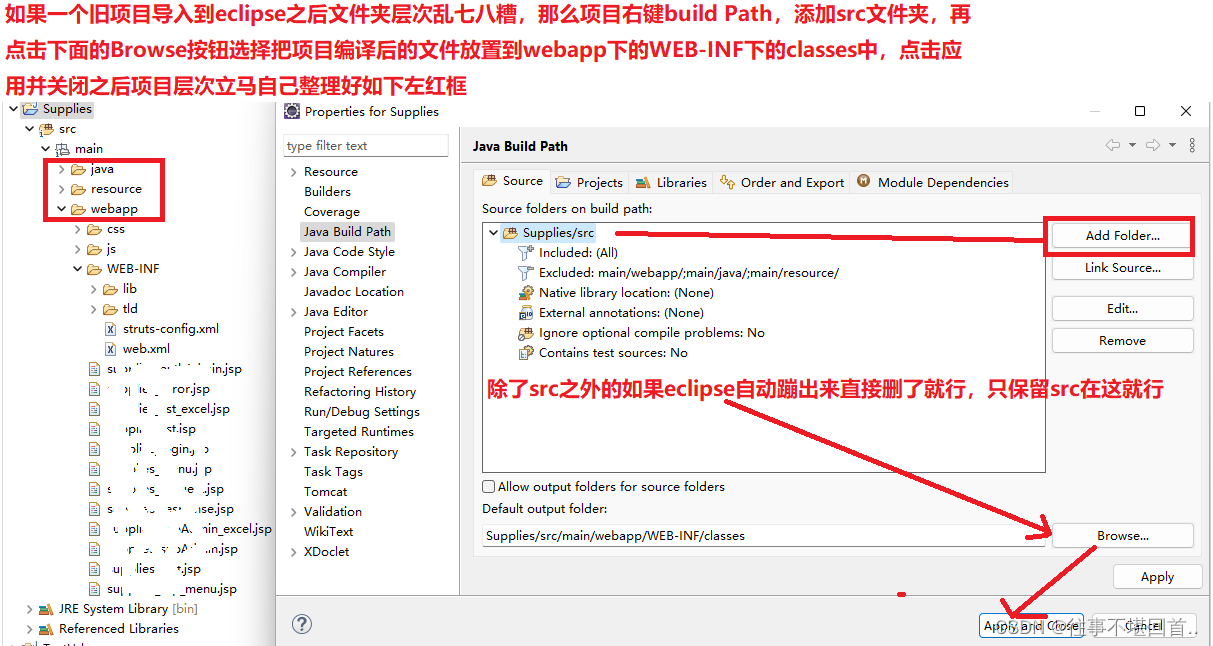
4、修改文件,显示图像化界面
打开mono_euroc.cc查看,第83行

5、ORB_SLAM3路径下执行命令
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml /home/geekfanr/catkin_ws/src/ORB_SLAM3/dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt

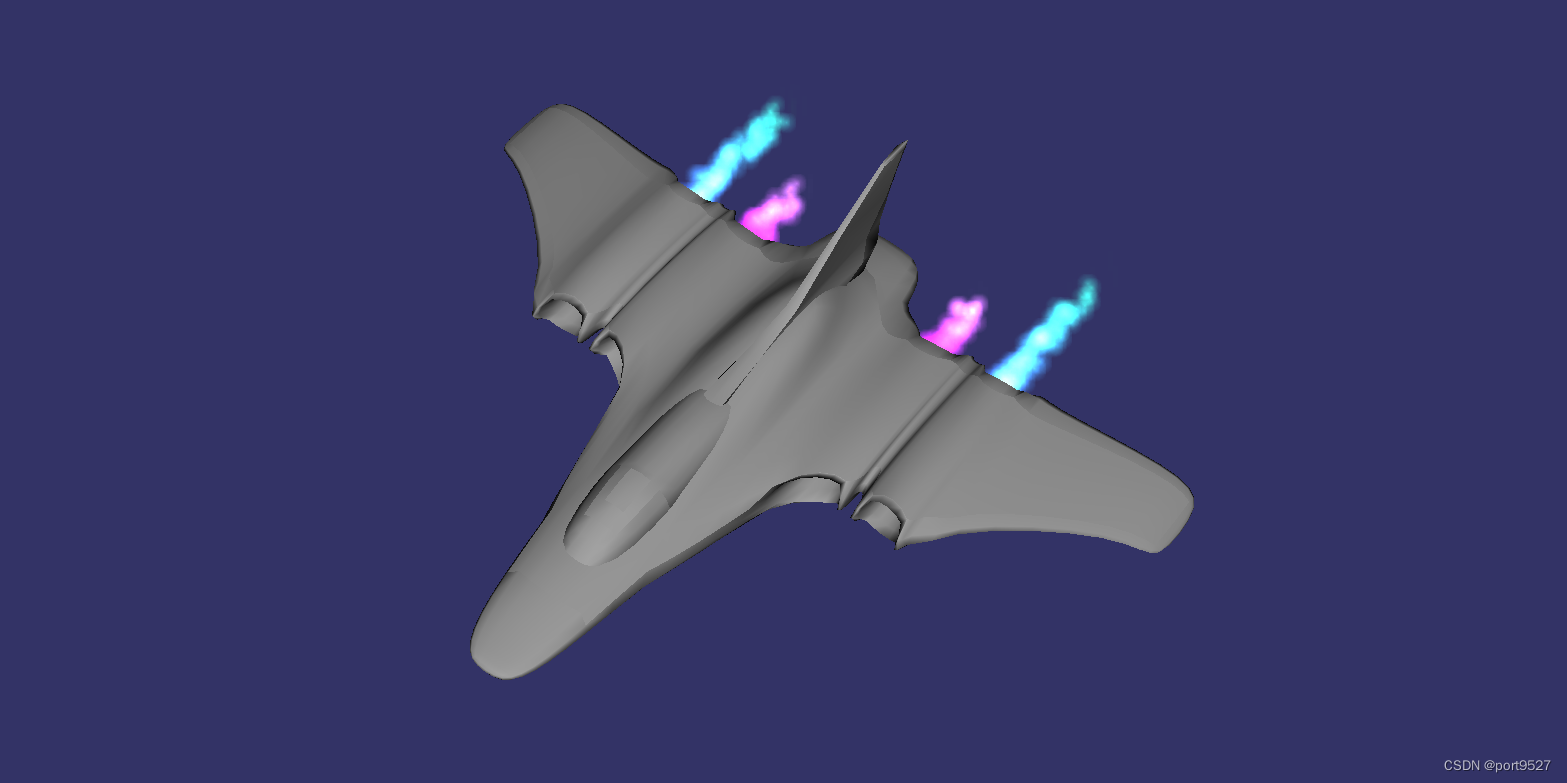
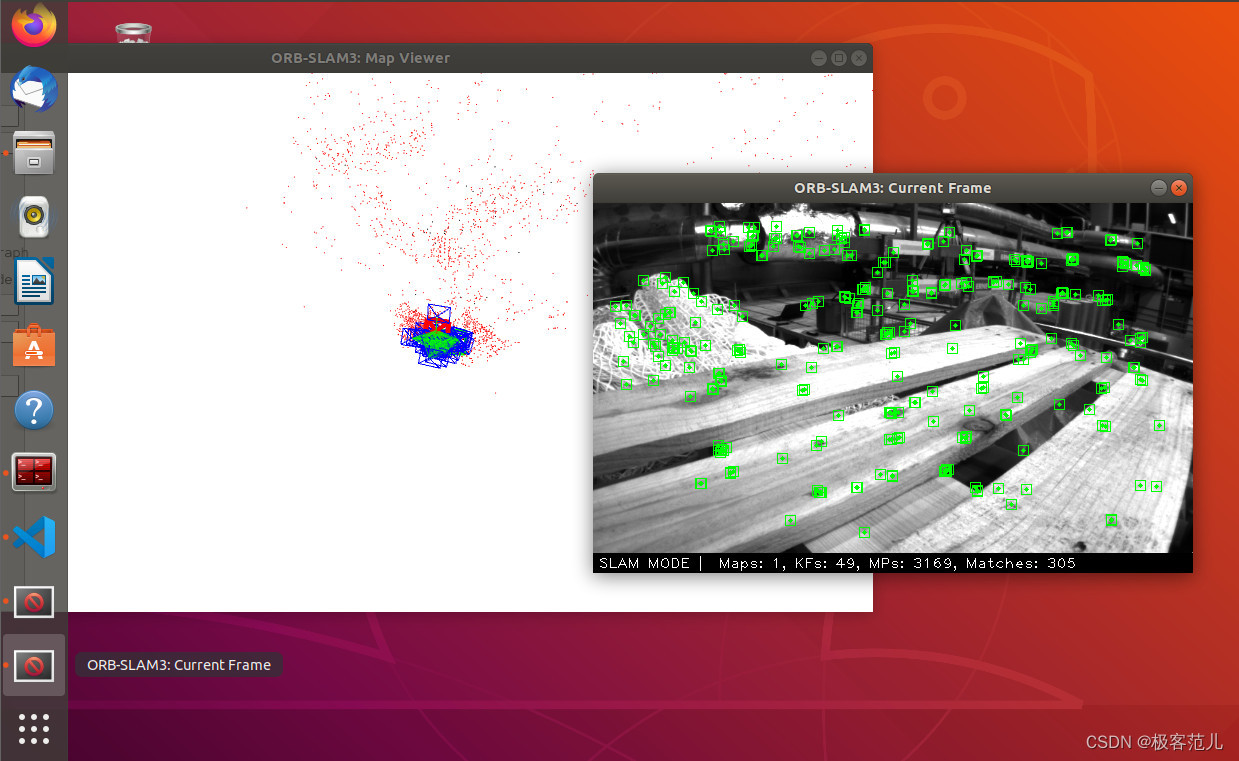
6、效果展示




![el-table点击表格某一行添加到URL参数,访问带参URL加载表格内容并滚动到选中行位置 [Vue3] [Element-plus 2.3]](https://img-blog.csdnimg.cn/98e5ad2a0182413294979e6591abeb03.png)