知识点:什么是掌控板?
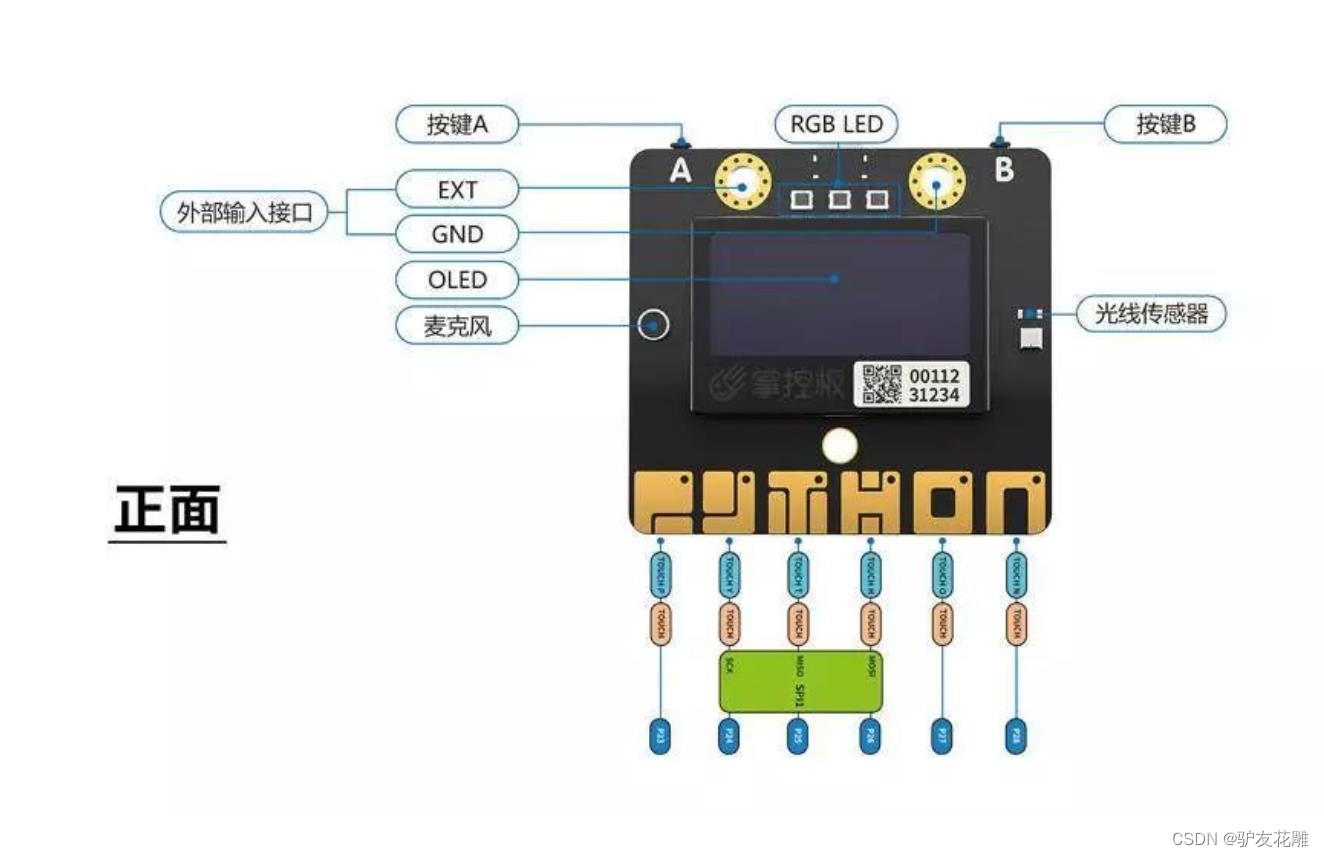
掌控板是一块普及STEAM创客教育、人工智能教育、机器人编程教育的开源智能硬件。它集成ESP-32高性能双核芯片,支持WiFi和蓝牙双模通信,可作为物联网节点,实现物联网应用。同时掌控板上集成了OLED显示屏、RGB灯、加速度计、麦克风、光线传感器、蜂鸣器、按键开关、触摸开关、金手指外部拓展接口,支持图形化及MicroPython代码编程,可实现智能机器人、创客智造作品等智能控制类应用。

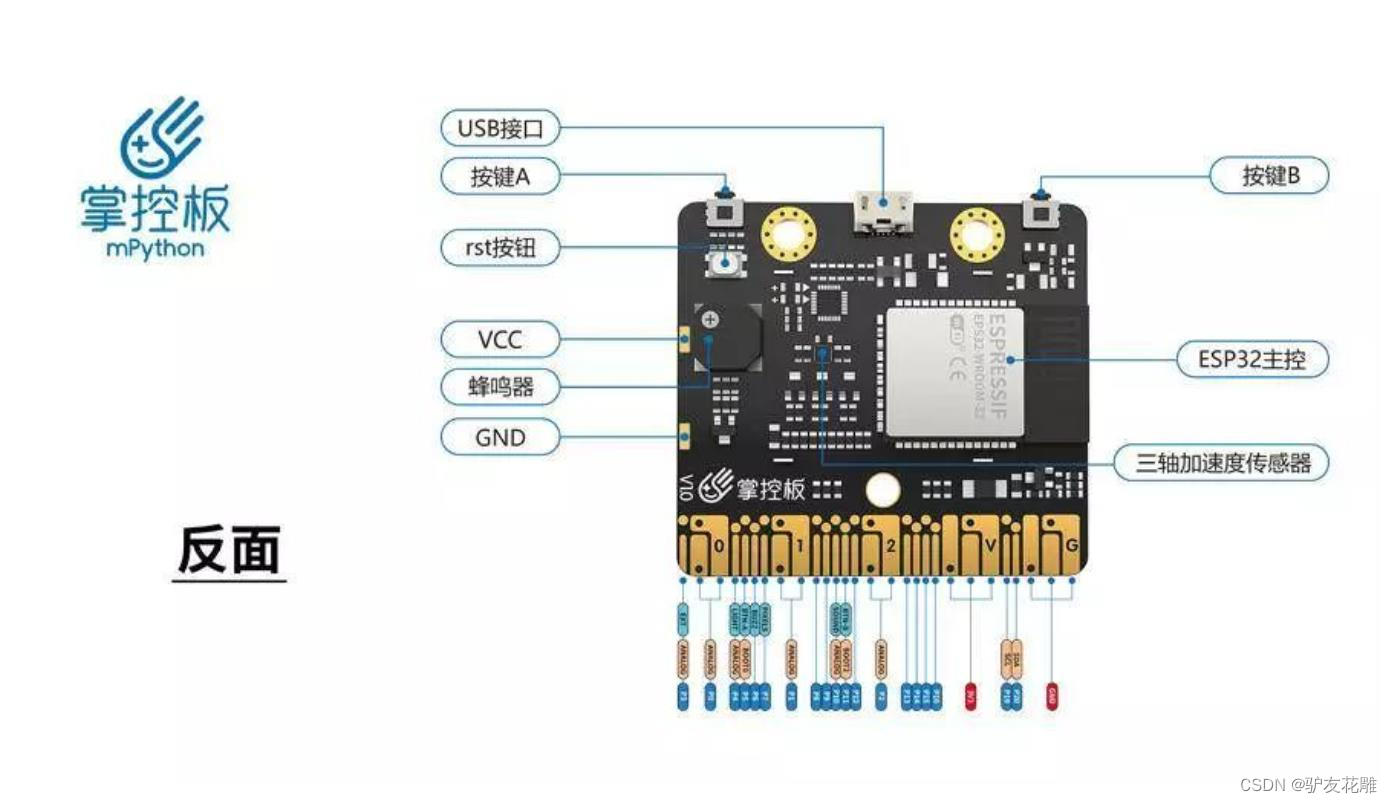
掌控板硬件特性:
ESP-32主控
处理器:Tensilica LX6双核处理器(一核处理高速连接;一核独立应用开发)
主频:高达240MHz的时钟频率
SRAM:520KB
Flash:8MB
Wi-Fi标准:FCC/CE/TELEC/KCC
Wi-Fi协议:802.11 b/g/n/d/e/i/k/r (802.11n,速度高达150 Mbps),A-MPDU和A-MSDU聚合,支持0.4us防护间隔
频率范围:2.4~2.5 GHz
蓝牙协议:符合蓝牙v4.2 BR/EDR和BLE标准
蓝牙音频:CVSD和SBC音频低功耗:10uA
供电方式:Micro USB供电
工作电压:3.3V
最大工作电流:200mA
最大负载电流:1000mA
掌控板载
三轴加速度计MSA300,测量范围:±2/4/8/16G
地磁传感器MMC5983MA,测量范围:±8 Gauss;精度0.4mGz,电子罗盘误差±0.5°
光线传感器
麦克风
3 颗全彩ws2812灯珠
1.3英寸OLED显示屏,支持16*16字符显示,分辨率128x64
无源蜂鸣器
支持2个物理按键(A/B)、6个触摸按键
支持1路鳄鱼夹接口,可方便接入各种阻性传感器
拓展接口
20通道数字I/O, (其中支持12路PWM,6路触摸输入)
5通道12bit模拟输入ADC,P0~P4
1路的外部输入鳄鱼夹接口:EXT/GND
支持I2C、UART、SPI通讯协议


地磁(磁场)传感器MMC5983MA
测量范围:±8 Gauss
精度0.4mGz,电子罗盘误差±0.5°
注:掌控板2.0版本才有

MMC5983AM特征
完全集成的3轴磁传感器和
需要较少外部电路的电子电路
组件
出色的动态范围和精度:
±8G FSR,16位操作
每LSB分辨率0.25mG
0.4mG的总RMS噪声
使航向精度达到1º
最大输出数据速率为600Hz
工业标准薄型包装
3.0x3.0x1.0毫米
使用内置的SET / RESET功能消磁
消除了热变化引起的偏移
错误(空字段输出)
清除残留的磁化强度
来自强大的外部领域
片内灵敏度补偿
片上温度传感器
Motion_Detection和Data_Ready中断
低功耗
1µA的掉电电流
I2
C从机,FAST(≤400KHz)模式
2.5V单路低功耗电源
1.8V I2
C接口
符合RoHS
与HMC5883L兼容的P2P

地磁(磁场)传感器MMC5983MA参数




地球磁场(the earth magnetic field)
是指地球周围空间分布的磁场。偶极型,近似于把一个磁铁棒放到地球中心,地磁北(N)极处于地理南极附近,地磁南(S)极处于地理北极附近。磁极与地理极不完全重合,存在磁偏角。地球磁场属于电磁场,是通过外核的电子随地球自转的电流效应(近似于电生磁)产生的磁场。
历史上,第一个提出地磁场理论概念的是英国人吉尔伯特。他在1600年提出一种论点,认为地球自身就是一个巨大的磁体,它的两极和地理两极相重合。这一理论确立了地磁场与地球的关系,指出地磁场的起因不应该在地球之外,而应在地球内部。
1893年,数学家高斯在他的著作《地磁力的绝对强度》中,从地磁成因于地球内部这一假设出发,创立了描绘地磁场的数学方法,从而使地磁场的测量和起源研究都可以用数学理论来表示。但这仅仅是一种形式上的理论,并没有从本质上阐明地磁场的起源。科学家们已掌握了地磁场的分布与变化规律,但是,对于地磁场的起源问题,学术界却一直没有找到一个令人满意的答案。关于地磁场起源的假说归纳起来可分为两大类,第一类假说是以现有的物理学理论为依据;第二类假说则独辟蹊径,认为对于地球这样一个宇宙物体,存在着不同于现有已知理论的特殊规律。属于第一类假说的有旋转电荷假说。它假定地球上存在着等量的异性电荷,一种分布在地球内部,另一种分布在地球表面,电荷随地球旋转,因而产生了磁场。这一假说能够很自然地通过电与磁的关系解释地磁场的成因。但是,这个假说却有一个致命缺点,首先它不能解释地球内外的电荷是如何分离的;其次,地球负载的电荷并不多,由它产生的磁场是很微弱的,根据计算,如果要想得到地磁场这样的磁场强度,地球的电荷储量需要扩大1亿倍才行,理论计算和实际情况出入很大。以地核为前提条件的地磁场假说也属于第一类假说,弗兰克在这类假说中提出了发电机效应理论。他认为地核中电流的形成,应该是地核金属物质在磁场中做涡旋运动时,通过感应的方式而发生的。同时,电流自身形式的场就是连续不断的再生磁场,好像发电机中的情形一样。弗兰克所建立的模型说明了怎样实现地磁场的再生过程,解释了地磁场有一定的数值。但是在应用这种模型的时候,却很难解释地核中的这种电路是怎样通过圆形回路而闭合的。此外,这个模型也没有考虑到电流对涡旋运动的反作用,而这种反作用是不允许涡旋分布于平行赤道面的平面内的。属于第一类假说的还有漂移电流假说、热力效应假说和霍尔效应假说等,但这些假说都不能全面地解释地磁场的奇异特性。关于地磁场起源还有第二类假说,这其中最具代表性的就是重物旋转假说。
1947年,布莱克特提出任意一个旋转体都具有磁矩,它与旋转体内是否存在电荷无关。这一假说认为,地球和其他天体的磁场都是在旋转中产生的,也就是说星体自然生磁,就好像电荷转动能产生磁场一样。但是,这一假说在试验和天文观测两方面都遇到了困难。在现有的实验条件下,还没有观察到旋转物体产生的磁效应。而对天体的观测结果表明,每个星球的磁场分布状况都很复杂,尚不能证明星球的旋转与磁场之间存在着必然的依存关系。因此上说,关于地磁场的起源问题,学术界仍处在探索与争鸣之中,尚没有一个具有相当说服力的理论,对地磁场的成因作出解释。

2、简易测量自然磁场(地磁)强度
#MicroPython动手做(21)——掌控板之指南针模块
#简易测量自然磁场(地磁)强度
from mpython import *
while True:
magnetic.peeling()
oled.fill(0)
oled.DispChar('磁场强度', 40, 15, 1)
oled.DispChar((str(magnetic.get_field_strength())), 33, 30, 1)
oled.show()
mPython 图形编程




3、柱状条动态地磁强度值
#MicroPython动手做(21)——掌控板之指南针模块
#柱状条动态地磁强度值
from mpython import *
myUI = UI(oled)
while True:
cc = ((100 - 0) / (2.7 - 0)) * (magnetic.get_field_strength() - 0) + 0
magnetic.peeling()
oled.fill(0)
oled.DispChar('磁场强度', 8, 15, 1)
oled.DispChar((str(magnetic.get_field_strength())), 56, 15, 1)
myUI.stripBar(6, 35, 110, 10, cc, 1, 1)
oled.show()
mPython 图形编程


4、磁感应开关控制RGB
#MicroPython动手做(21)——掌控板之指南针模块
#磁感应开关控制RGB
from mpython import *
import time
while True:
magnetic.peeling()
oled.fill(0)
oled.DispChar("磁场强度", 39, 15, 1)
oled.DispChar((str(magnetic.get_field_strength())), 33, 35, 1)
oled.show()
if int(magnetic.get_field_strength()) > 200:
rgb.fill((int(255), int(0), int(0)))
rgb.write()
time.sleep_ms(1)
oled.fill(0)
oled.DispChar("三颗红灯 开", 26, 20, 1)
oled.show()
time.sleep(1)
else:
rgb.fill( (0, 0, 0) )
rgb.write()
time.sleep_ms(1)
mPython X 图形编程









![[Round#14 Illuminate with your bril]](https://img-blog.csdnimg.cn/a3ca2d9e3f8745d49cf78412f382e881.png)