1. 基本思路
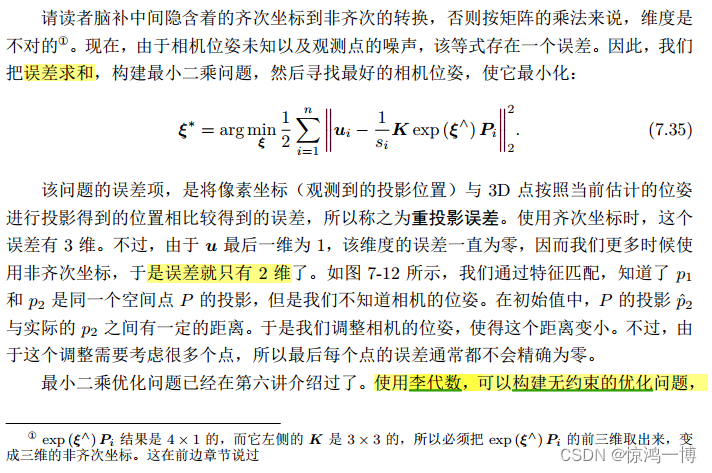
重投影误差表示为e, 相机的位姿表示为ξ (或者表示为T=(R,t)), 空间点表示为P, 则空间点投影到相机坐标系下的空间坐标点的相机坐标表示为P'=[X', Y', Z'], 则
重投影误差e对于相机的位姿ξ的雅克比矩阵表示为

分别求等式右侧的两半部分(误差对空间点的相机坐标的导数,和 空间点的相机坐标对相机位姿的导数),然后相乘即可。
同理, 重投影误差e对于空间点的坐标P的雅可比矩阵,可以表示为

分别求等式右侧的两半部分(误差对空间点的相机坐标的导数,和 空间点的相机坐标对空间点视觉坐标的导数),然后相乘即可。
最终结果,见下面的公式(7.45) 和 (7.47)
2. 具体推导过程
参考视觉slam十四讲,第7章



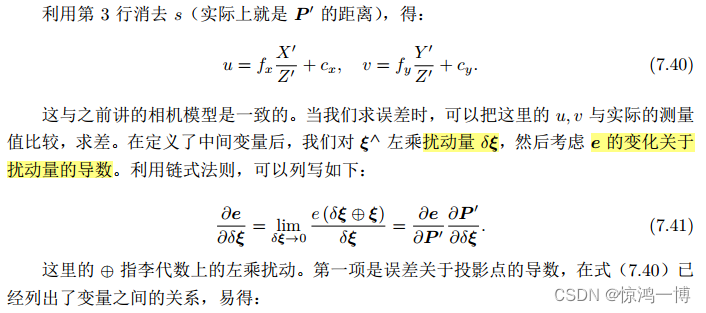
残差(重投影误差)对相机位姿的导数(雅克比矩阵):

残差(重投影误差)对landmark的导数(雅克比矩阵):

于是,我们推导了观测相机方程关于相机位姿与特征点的两个导数矩阵。它们十分重要,能够在优化过程中提供重要的梯度方向,指导优化的迭代。
3. 拓展
那么由相机位姿(camera pose)和空间点(land mark)构成状态变量的,在最小重投影误差时的求解方程,对应的信息矩阵是什么呢?(信息矩阵H的一般构建形式: )
参考vio课程:第4节 滑动窗口算法理论:VIO融合及其可观性与一致性
Eigen::Matrix<double,2,3> jacobian_uv_Pc;
jacobian_uv_Pc<< fx/z, 0 , -x * fx/z_2,
0, fy/z, -y * fy/z_2;
// 重投影误差对 landmark 的求导 对应上述公式(7.47)
Eigen::Matrix<double,2,3> jacobian_Pj = jacobian_uv_Pc * Rcw;
// 重投影误差对 camera pose 的求导,
// SLAM十四讲中,基本对于上述公式(7.45): 这里的前三列在后,后三列在前
Eigen::Matrix<double,2,6> jacobian_Ti;
jacobian_Ti << -x* y * fx/z_2, (1+ x*x/z_2)*fx, -y/z*fx, fx/z, 0 , -x * fx/z_2,
-(1+y*y/z_2)*fy, x*y/z_2 * fy, x/z * fy, 0,fy/z, -y * fy/z_2;
// camera pose 和 camera pose 之间的信息矩阵:
H.block(i*6,i*6,6,6) += jacobian_Ti.transpose() * jacobian_Ti;
// landmark 和 landmark 之间的信息矩阵
H.block(j*3 + 6*poseNums,j*3 + 6*poseNums,3,3) += jacobian_Tj.transpose() * jacobian_Tj;
// camera pose 和 landmark 之间的信息矩阵
H.block(i*6,j*3 + 6*poseNums, 6,3) += jacobian_Ti.transpose() * jacobian_Pj;
// landmark 和 camera pose 之间的信息矩阵
H.block(j*3 + 6*poseNums,i*6 , 3,6) += jacobian_Pj.transpose() * jacobian_Ti;
相关文章:SLAM_BA中重投影误差e 关于相机位姿扰动量δξ 的雅克比矩阵J 公式推导_惊鸿一博的博客-CSDN博客

![[附源码]计算机毕业设计个性化名片网站Springboot程序](https://img-blog.csdnimg.cn/d1a1c10188a34f7fb44f51e7f915f8e4.png)