概述
HC-05蓝牙模块是一种基于蓝牙协议的简单无线通信设备。该模块基于BC417单芯片蓝牙IC,符合蓝牙v2.0标准,支持UART和USB接口。
具有两种工作模式:命令响应工作模式和自动连接工作模式。
当模块处于命令响应工作模式(或者AT模式)时能才能执行 AT 命令,用户可向模块发送各种 AT指令,为模块设定控制参数或发布控制命令。(AT指令就是我们PC与一些终端设备(例如蓝牙,WiFi模块)之间进行通信的,配置这些终端设备参数的一套指令。)在自动连接工作模式下模块又可分为主(Master)、从(Slave)和回环(Loopback)三种工作角色。当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输。主模式:该模块可以主动搜索并连接其它蓝牙模块并接收发送数据。从模式:只能被搜索被其它蓝牙模块连接进行接收发送数据。回环:蓝牙模块就是将接收的数据原样返回给远程的主设备。
HC-05蓝牙模块有六个管脚
STATE:状态指示。未连接时输出低电平,连接时输出高电平。
RXD:UART接收引脚
TXD:UART发射引脚
GND:地
VCC:接电源,可以用+5V。
EN:使能。接地禁用模块,悬空或接3.3V使能。
如何进入AT模式:
HC-05与HC-06不同,HC-06没有连接上时,就是AT模式,而HC-05需要有个开关,注意到模块上的小黑点没有,不按的时候是可配对状态,1秒闪2次。按它再上电就使HC-05进入AT模式了,严格的讲,它只是一个开的作用,无法退出AT模式。(退出的话可以在串口发送AT+RESET复位,或者重新上电)此时指示灯慢闪(2秒亮一次),模块进入AT状态。
常用AT指令有:
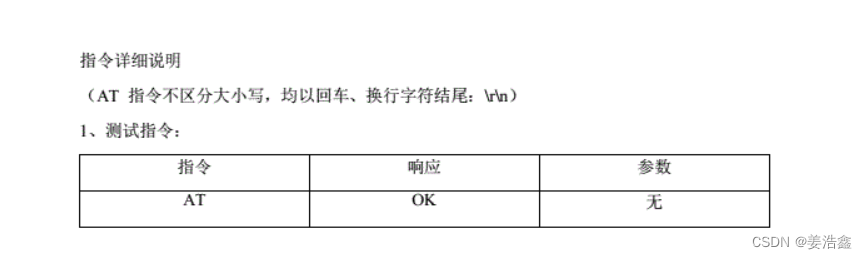
AT
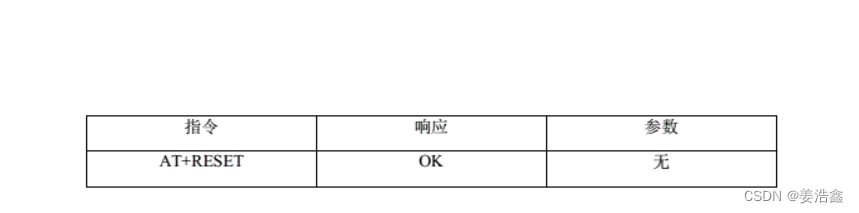
AT+RESET:模块复位
恢复默认状态
AT+NAME:查询修改蓝牙名称。
AT+NAME或AT+NAME?,返回蓝牙名称。
AT+NAME=XXX,修改蓝牙名称为XXX。
AT+ROLE:查询修改主从模式。AT+ROLE或AT+ROLE?,返回当前主从模式,1表示主机,0表示从机。
AT+ROLE=X,修改主从模式,X为1或0,对应主机和从机。主模式与从模式的区别:主机是指能够搜索别人并主动建立连接的一方,从机则不能主动建立连接,只能等别人连接自己。
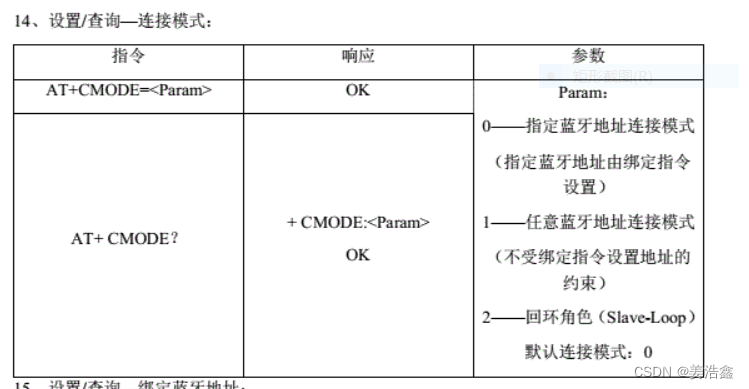
AT+CMODE:查询修改连接模式。
AT+CMODE或AT+CMODE?,返回连接模式,1表示任意蓝牙地址连接模式,0表示指定蓝牙地址连接模式,需要地址绑定
AT+COMDE=X。
AT+PSWD:查询修改配对密码。AT+PSWD或AT+PSWD?,返回密码,默认是1234。
AT+PSWD=XXXX,XXXX为新密码。
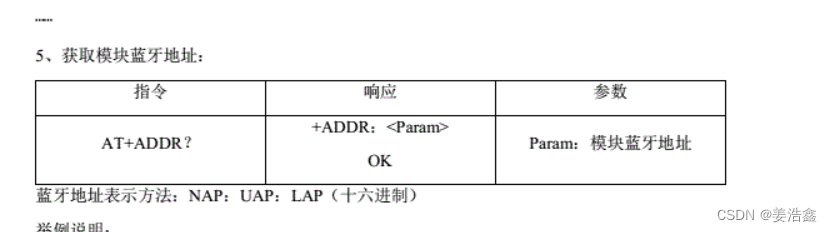
AT+ADDR:查询蓝牙模块地址。
返回蓝牙模块地址,如98D3:31:F6338B
AT+BIND:查询修改绑定连接地址。
AT+BIND或AT+BIND?,返回绑定连接地址。
AT+BIND=XX,XX,XX,修改绑定地址,在CMODE=0时可用,注意冒号改为逗号。
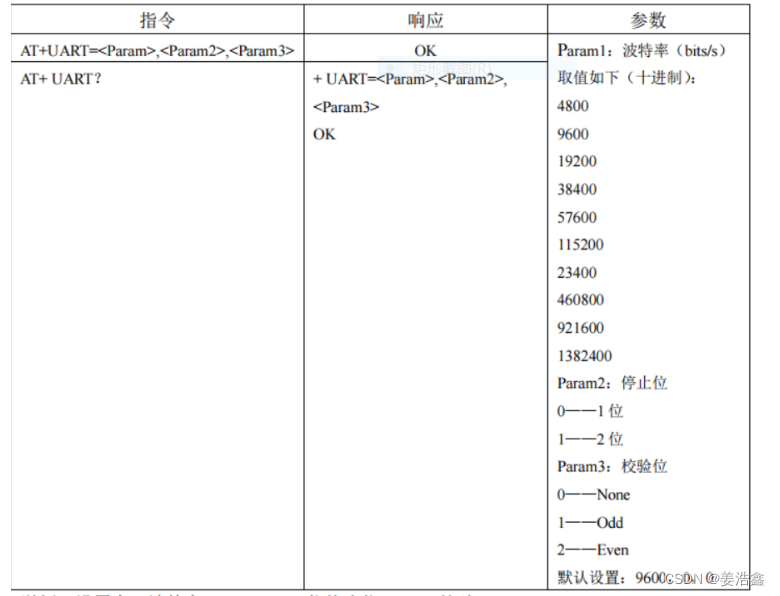
AT+UART:查询修改串口波特率。
AT+ORGL:复位蓝牙模块。
AT+RMAAD:清空配对列表。





at数据的发送格式是需要在指令后接回车换行的,如果按下回车后发送指令无效,那么可以在指令后加上:\r\n ,例如:AT\r\n,再次发送。
同样的指令后接‘=’就是修改,后接‘?’就是读取。
两个蓝牙模块相互连接
配置蓝牙A为主机,指定地址连接;蓝牙B为从机。蓝牙A、B进入AT模式。
设置B配对码,AT+PSWD=“1234”。
设置B从模式,AT+ROLE=0。
查询B地址,AT+ADDR,得到B地址21:13:508222。
设置A配对码,AT+PSWD=“1234”。(配对码要一样)
设置A主模式,AT+ROLE=1。
设置A指定地址连接,AT+CMODE=0。
A绑定B,AT+BIND=21:13:508222。
重新上电,连接成功后HC-05上的指示灯将进入2s周期的快速双闪。
//初始化HC05模块
//返回值:0,成功;1,失败.
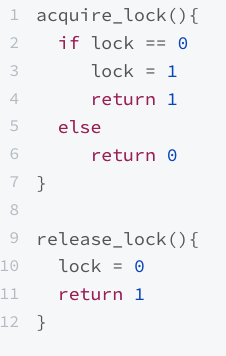
u8 HC05_Init(void)
{
u8 retry=10,t;
u8 temp=1;
RCC->APB2ENR|=1<<4; //使能PORTC时钟
GPIOC->CRL&=0XFF00FFFF; //PC4,推挽输出;PC5,输入
GPIOC->CRL|=0X00830000;
GPIOC->ODR|=1<<5; //PC5上拉
USART2_Init(36,9600); //初始化串口2为:9600,波特率.
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u2_printf("AT\r\n"); //发送AT测试指令
HC05_KEY=0; //KEY拉低,退出AT模式
for(t=0;t<10;t++) //最长等待50ms,来接收HC05模块的回应
{
if(USART2_RX_STA&0X8000)break;
delay_ms(5);
}
if(USART2_RX_STA&0X8000) //接收到一次数据了
{
temp=USART2_RX_STA&0X7FFF; //得到数据长度
USART2_RX_STA=0;
if(temp==4&&USART2_RX_BUF[0]=='O'&&USART2_RX_BUF[1]=='K')
{
temp=0;//接收到OK响应
break;
}
}
}
if(retry==0)temp=1; //检测失败
return temp;
}
通过AT模式来判断是否有蓝牙存在
//获取HC05模块的角色
//返回值:0,从机;1,主机;0XFF,获取失败.
u8 HC05_Get_Role(void)
{
u8 retry=0X0F;
u8 temp,t;
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u2_printf("AT+ROLE?\r\n"); //查询角色
for(t=0;t<20;t++) //最长等待200ms,来接收HC05模块的回应
{
delay_ms(10);
if(USART2_RX_STA&0X8000)break;
}
HC05_KEY=0; //KEY拉低,退出AT模式
if(USART2_RX_STA&0X8000) //接收到一次数据了
{
temp=USART2_RX_STA&0X7FFF; //得到数据长度
USART2_RX_STA=0;
if(temp==13&&USART2_RX_BUF[0]=='+')//接收到正确的应答了
{
temp=USART2_RX_BUF[6]-'0';//得到主从模式值
break;
}
}
}
if(retry==0)temp=0XFF;//查询失败.
return temp;
}
通过AT指令来判断是什么模式
//ATK-HC05设置命令
//此函数用于设置ATK-HC05,适用于仅返回OK应答的AT指令
//atstr:AT指令串.比如:"AT+RESET"/"AT+UART=9600,0,0"/"AT+ROLE=0"等字符串
//返回值:0,设置成功;其他,设置失败.
u8 HC05_Set_Cmd(u8* atstr)
{
u8 retry=0X0F;
u8 temp,t;
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u2_printf("%s\r\n",atstr); //发送AT字符串
HC05_KEY=0; //KEY拉低,退出AT模式
for(t=0;t<20;t++) //最长等待100ms,来接收HC05模块的回应
{
if(USART2_RX_STA&0X8000)break;
delay_ms(5);
}
if(USART2_RX_STA&0X8000) //接收到一次数据了
{
temp=USART2_RX_STA&0X7FFF; //得到数据长度
USART2_RX_STA=0;
if(temp==4&&USART2_RX_BUF[0]=='O')//接收到正确的应答了
{
temp=0;
break;
}
}
}
if(retry==0)temp=0XFF;//设置失败.
return temp;
}
通过AT模式来设置主从模式
void HC05_Sta_Show(void)
{
if(HC05_LED)LCD_ShowString(120,140,120,16,16,"STA:Connected "); //连接成功
else LCD_ShowString(120,140,120,16,16,"STA:Disconnect"); //未连接
}
#define HC05_LED PCin(5) //蓝牙连接状态信号






![[附源码]Python计算机毕业设计Djangoospringboot作业管理系统](https://img-blog.csdnimg.cn/8a78827d55934b51a1678112870d5095.png)



![[附源码]JAVA毕业设计医疗器械销售电子商城(系统+LW)](https://img-blog.csdnimg.cn/f7532c2fbe324aab9293f275647982f8.png)