文章目录
20.4 飞行前测试控制装置
20.5 测试失控保护
20.6 减少控制的滞后性

20.4 飞行前测试控制装置
在第一次飞行之前,你应该测试所有的功能是否工作良好。
要检查上述控制措施的移动方向是否正确:
- 在操纵杆设置屏幕上单击"启用"按钮,启用向飞行器发送消息;
- 用 USB 线将你的自动驾驶仪连接到电脑上;
- 按下任务规划器的连接按钮;
- 进入初始设置|强制性硬件|无线电校准屏幕,确保绿条的移动方向正确。请记住,除了 Pitch 的移动方向与杆子的移动方向相反外,其他的杆子移动方向是相同的;
- 如果有任何控制是相反的,请在操纵杆设置屏幕上勾选"反转"复选框。
接下来测试你是否能够解锁、加锁和切换到各种飞行模式(不需要连接电池)。
20.5 测试失控保护
所有这些测试都应该在地面上进行,同时断开电池,或者至少让螺旋桨离开飞行器。
在发射机关闭的情况下,模拟禁用飞行中的操纵杆(即没有故障切换到常规发射机):
1. 关闭常规发射器。
2. 与任务规划器连接,按下操纵杆窗口的启用按钮,确保 RC 覆盖被发送到飞行器上。(使用无线电校准屏幕或飞行数据的状态屏幕)
3. 解锁飞行器,切换到自稳或 Loiter 模式,提高油门。
4. 通过检查飞行数据屏幕的"ch1out"~"ch4out",确保电机正在旋转。
5. 按下操纵杆屏幕的禁用按钮。
6. HUD 上应出现"失控保护",飞行器应切换到"LAND"或"RTL"。
7. 重复上述测试,但在第 5 步时实际断开操纵杆与计算机的连接。结果应该是一样的。

模拟故障到常规发射器/接收器的情况
1. 打开常规发射机,确保你能控制飞行器(也许可以通过检查无线电校准页或飞行数据屏幕的状态标签的"ch1in"~"ch8in")。
2. 使用普通发射器,使飞行器处于 AltHold 模式,并将油门提高到中段。
3. 在操纵杆屏幕上按下启用按钮。
4. 在自稳模式下解锁飞行器,并将油门提高到全速(用操纵杆)。
5. 在飞行数据屏幕的状态选项卡中,通过检查"ch3in"是否非常高(通常在 1900 左右)来检查油门是否处于全速状态。
6. 在操纵杆屏幕上按下禁用按钮,检查"ch3in"是否下降到一个中间值(约 1500)。
7. 飞行器应保持当前的飞行模式(自稳),但控制权已返回到发射器。飞行员的输入应该反映在"ch1in"~"ch8in"值中。通过移动飞行模式开关将飞行器切换到 AltHold 模式。
模拟失去无线电联系
如果失去了无线电联系,飞行器应该像操纵杆被"禁用"或与电脑断开连接那样作出反应。你可以通过重复上面的操作来测试,但不是按操纵杆屏幕上的禁用按钮,而是断开无线电连接。为了看到飞行器的状态,你将需要分别连接两个任务规划器(只可能在 Pixhawk 上)。带有操纵杆的任务规划器应通过遥测连接,而第二个任务规划器应通过 USB 连接。
20.6 减少控制的滞后性
几乎不可能使操纵杆像普通发射器一样反应灵敏,但可以通过以下方式减少滞后:
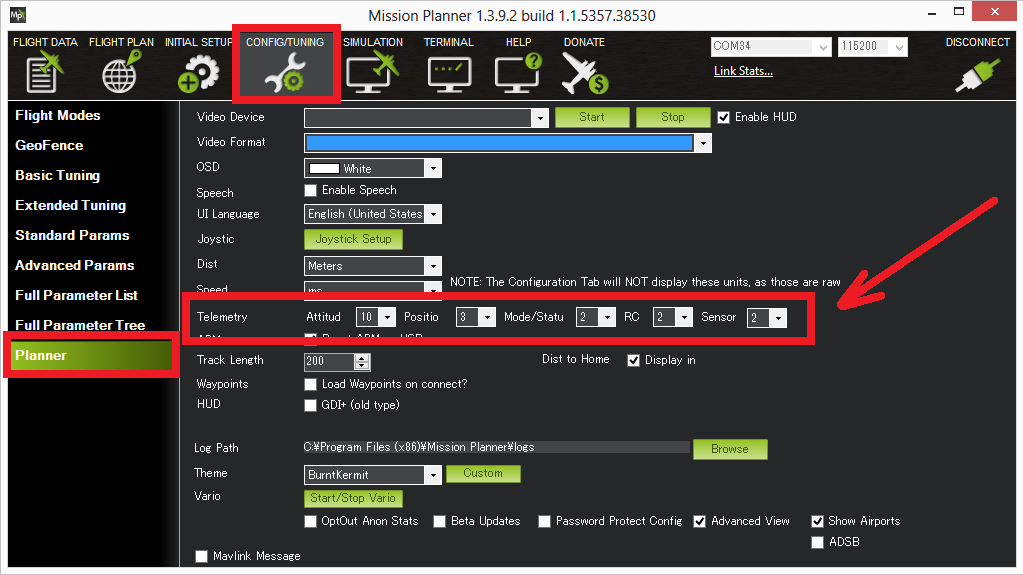
- 减少飞行器和 GCS 之间从 MP 的配置/调谐|计划器页面发送其他遥测数据的速率;
- 如果使用 SiK 无线电或 RFD900 无线电,可以按照这里的描述将其调到低延迟模式(Low Latency mode as described here)。