目录
- 一、准备工作
- 1. 导入数据
- 2. 数据可视化
- 二、构建模型
- 1. 构建生成器
- 2. 构建鉴别器
- 三、训练模型
- 1. 定义损失函数
- 2. 定义优化器
- 3. 训练模型
- 四、理论基础
- 1.DCGAN原理
- 2.DCGAN网络
- 3.个人感悟
- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍖 原作者:K同学啊|接辅导、项目定制
一、准备工作
import torch
import numpy as np
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.autograd import Variable
from torchvision.utils import save_image
from torchvision.utils import make_grid
from torch.utils.tensorboard import SummaryWriter
from torchsummary import summary
import matplotlib.pyplot as plt
import datetime
torch.manual_seed(1)
<torch._C.Generator at 0x1737fda1c10>
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
batch_size = 128
1. 导入数据
train_transform = transforms.Compose([
transforms.Resize(128),
transforms.ToTensor(),
transforms.Normalize([0.5,0.5,0.5], [0.5,0.5,0.5])])
train_dataset = datasets.ImageFolder(root='./data/rps/', transform=train_transform)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=6)
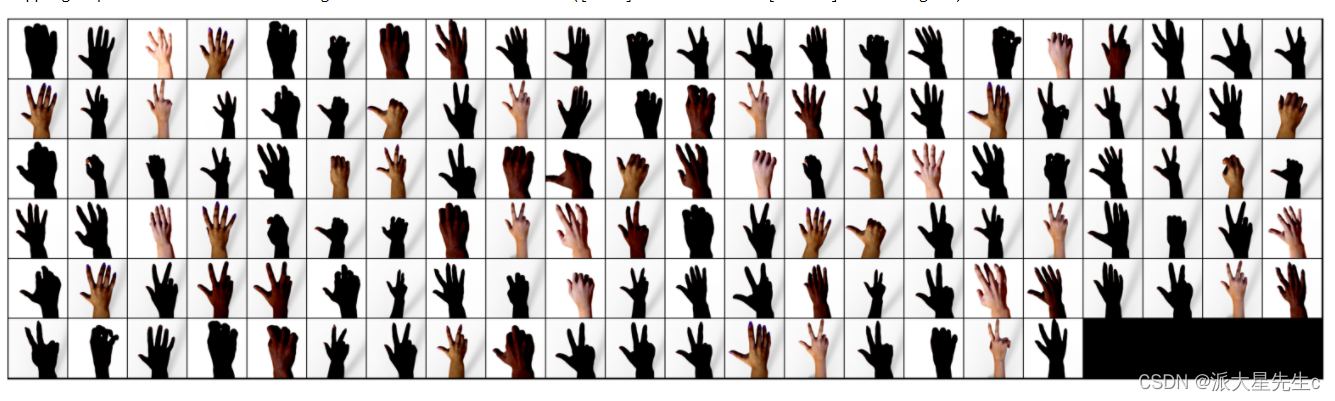
2. 数据可视化
def show_images(images):
fig, ax = plt.subplots(figsize=(20, 20))
ax.set_xticks([]); ax.set_yticks([])
ax.imshow(make_grid(images.detach(), nrow=22).permute(1, 2, 0))
def show_batch(dl):
for images, _ in dl:
show_images(images)
break
~~~python
show_batch(train_loader)
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
image_shape = (3, 128, 128)
image_dim = int(np.prod(image_shape))
latent_dim = 100
n_classes = 3
embedding_dim = 100
二、构建模型
# 自定义权重初始化函数,用于初始化生成器和判别器的权重
def weights_init(m):
# 获取当前层的类名
classname = m.__class__.__name__
# 如果当前层是卷积层(类名中包含 'Conv' )
if classname.find('Conv') != -1:
# 使用正态分布随机初始化权重,均值为0,标准差为0.02
torch.nn.init.normal_(m.weight, 0.0, 0.02)
# 如果当前层是批归一化层(类名中包含 'BatchNorm' )
elif classname.find('BatchNorm') != -1:
# 使用正态分布随机初始化权重,均值为1,标准差为0.02
torch.nn.init.normal_(m.weight, 1.0, 0.02)
# 将偏置项初始化为全零
torch.nn.init.zeros_(m.bias)
1. 构建生成器
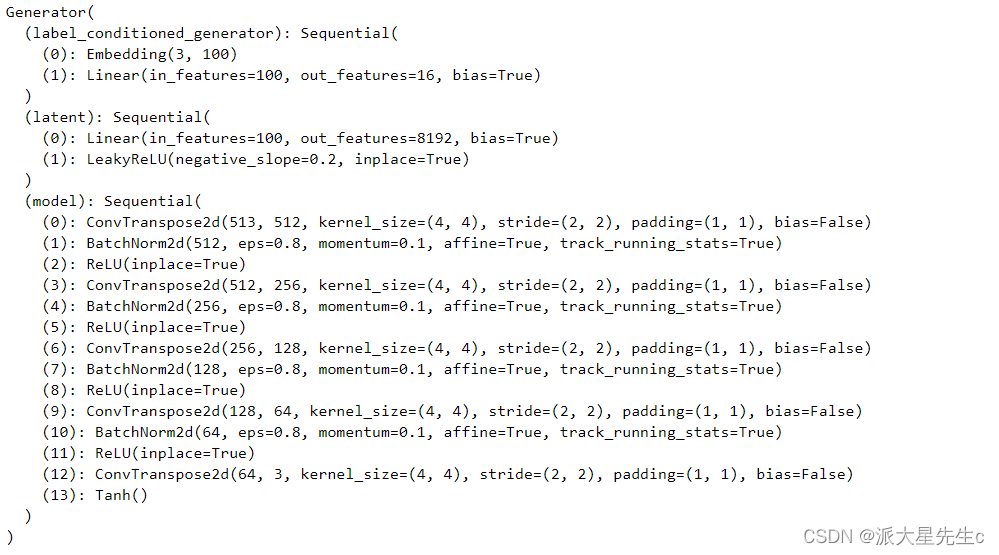
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
# 定义条件标签的生成器部分,用于将标签映射到嵌入空间中
# n_classes:条件标签的总数
# embedding_dim:嵌入空间的维度
self.label_conditioned_generator = nn.Sequential(
nn.Embedding(n_classes, embedding_dim), # 使用Embedding层将条件标签映射为稠密向量
nn.Linear(embedding_dim, 16) # 使用线性层将稠密向量转换为更高维度
)
# 定义潜在向量的生成器部分,用于将噪声向量映射到图像空间中
# latent_dim:潜在向量的维度
self.latent = nn.Sequential(
nn.Linear(latent_dim, 4*4*512), # 使用线性层将潜在向量转换为更高维度
nn.LeakyReLU(0.2, inplace=True) # 使用LeakyReLU激活函数进行非线性映射
)
# 定义生成器的主要结构,将条件标签和潜在向量合并成生成的图像
self.model = nn.Sequential(
# 反卷积层1:将合并后的向量映射为64x8x8的特征图
nn.ConvTranspose2d(513, 64*8, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*8, momentum=0.1, eps=0.8), # 批标准化
nn.ReLU(True), # ReLU激活函数
# 反卷积层2:将64x8x8的特征图映射为64x4x4的特征图
nn.ConvTranspose2d(64*8, 64*4, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*4, momentum=0.1, eps=0.8),
nn.ReLU(True),
# 反卷积层3:将64x4x4的特征图映射为64x2x2的特征图
nn.ConvTranspose2d(64*4, 64*2, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*2, momentum=0.1, eps=0.8),
nn.ReLU(True),
# 反卷积层4:将64x2x2的特征图映射为64x1x1的特征图
nn.ConvTranspose2d(64*2, 64*1, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*1, momentum=0.1, eps=0.8),
nn.ReLU(True),
# 反卷积层5:将64x1x1的特征图映射为3x64x64的RGB图像
nn.ConvTranspose2d(64*1, 3, 4, 2, 1, bias=False),
nn.Tanh() # 使用Tanh激活函数将生成的图像像素值映射到[-1, 1]范围内
)
def forward(self, inputs):
noise_vector, label = inputs
# 通过条件标签生成器将标签映射为嵌入向量
label_output = self.label_conditioned_generator(label)
# 将嵌入向量的形状变为(batch_size, 1, 4, 4),以便与潜在向量进行合并
label_output = label_output.view(-1, 1, 4, 4)
# 通过潜在向量生成器将噪声向量映射为潜在向量
latent_output = self.latent(noise_vector)
# 将潜在向量的形状变为(batch_size, 512, 4, 4),以便与条件标签进行合并
latent_output = latent_output.view(-1, 512, 4, 4)
# 将条件标签和潜在向量在通道维度上进行合并,得到合并后的特征图
concat = torch.cat((latent_output, label_output), dim=1)
# 通过生成器的主要结构将合并后的特征图生成为RGB图像
image = self.model(concat)
return image
~~~python
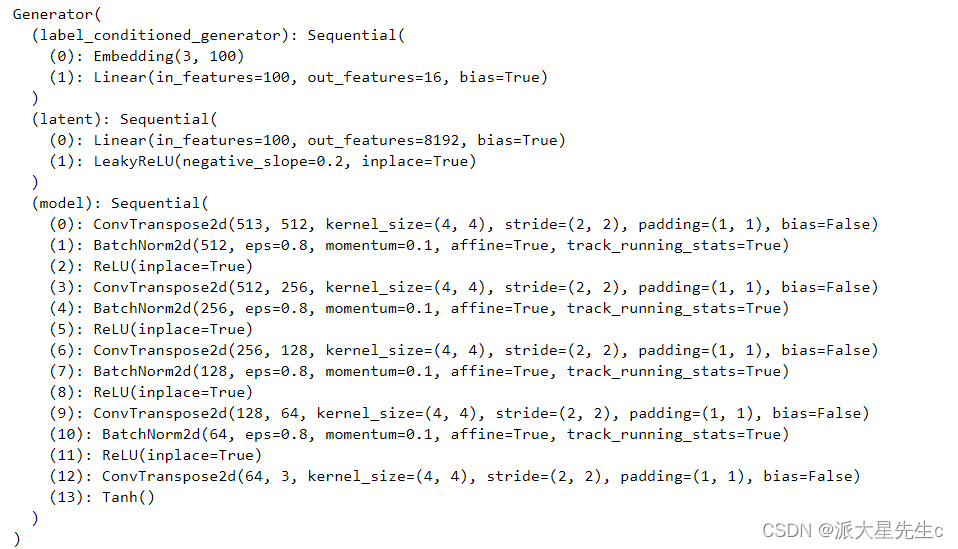
generator = Generator().to(device)
generator.apply(weights_init)
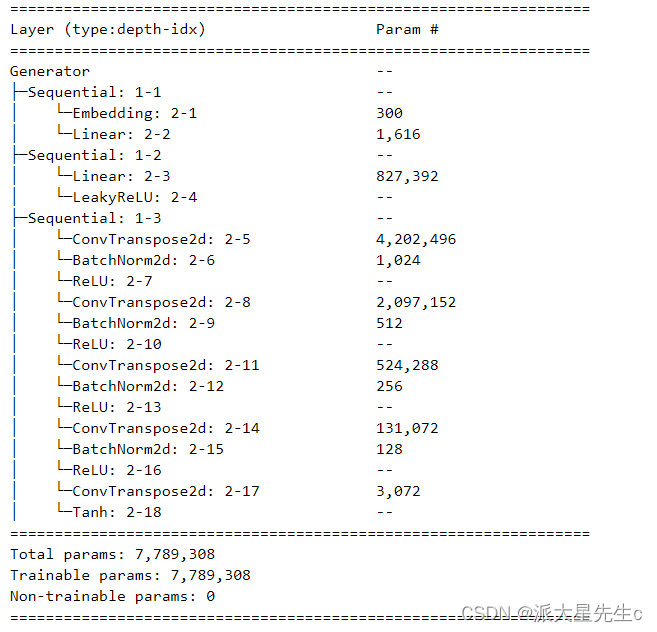
print(generator)
from torchinfo import summary
summary(generator)
a = torch.ones(100)
b = torch.ones(1)
b = b.long()
a = a.to(device)
b = b.to(device)
# generator((a,b))
2. 构建鉴别器
import torch
import torch.nn as nn
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
# 定义一个条件标签的嵌入层,用于将类别标签转换为特征向量
self.label_condition_disc = nn.Sequential(
nn.Embedding(n_classes, embedding_dim), # 嵌入层将类别标签编码为固定长度的向量
nn.Linear(embedding_dim, 3*128*128) # 线性层将嵌入的向量转换为与图像尺寸相匹配的特征张量
)
# 定义主要的鉴别器模型
self.model = nn.Sequential(
nn.Conv2d(6, 64, 4, 2, 1, bias=False), # 输入通道为6(包含图像和标签的通道数),输出通道为64,4x4的卷积核,步长为2,padding为1
nn.LeakyReLU(0.2, inplace=True), # LeakyReLU激活函数,带有负斜率,增加模型对输入中的负值的感知能力
nn.Conv2d(64, 64*2, 4, 3, 2, bias=False), # 输入通道为64,输出通道为64*2,4x4的卷积核,步长为3,padding为2
nn.BatchNorm2d(64*2, momentum=0.1, eps=0.8), # 批量归一化层,有利于训练稳定性和收敛速度
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(64*2, 64*4, 4, 3, 2, bias=False), # 输入通道为64*2,输出通道为64*4,4x4的卷积核,步长为3,padding为2
nn.BatchNorm2d(64*4, momentum=0.1, eps=0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(64*4, 64*8, 4, 3, 2, bias=False), # 输入通道为64*4,输出通道为64*8,4x4的卷积核,步长为3,padding为2
nn.BatchNorm2d(64*8, momentum=0.1, eps=0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Flatten(), # 将特征图展平为一维向量,用于后续全连接层处理
nn.Dropout(0.4), # 随机失活层,用于减少过拟合风险
nn.Linear(4608, 1), # 全连接层,将特征向量映射到输出维度为1的向量
nn.Sigmoid() # Sigmoid激活函数,用于输出范围限制在0到1之间的概率值
)
def forward(self, inputs):
img, label = inputs
# 将类别标签转换为特征向量
label_output = self.label_condition_disc(label)
# 重塑特征向量为与图像尺寸相匹配的特征张量
label_output = label_output.view(-1, 3, 128, 128)
# 将图像特征和标签特征拼接在一起作为鉴别器的输入
concat = torch.cat((img, label_output), dim=1)
# 将拼接后的输入通过鉴别器模型进行前向传播,得到输出结果
output = self.model(concat)
return output
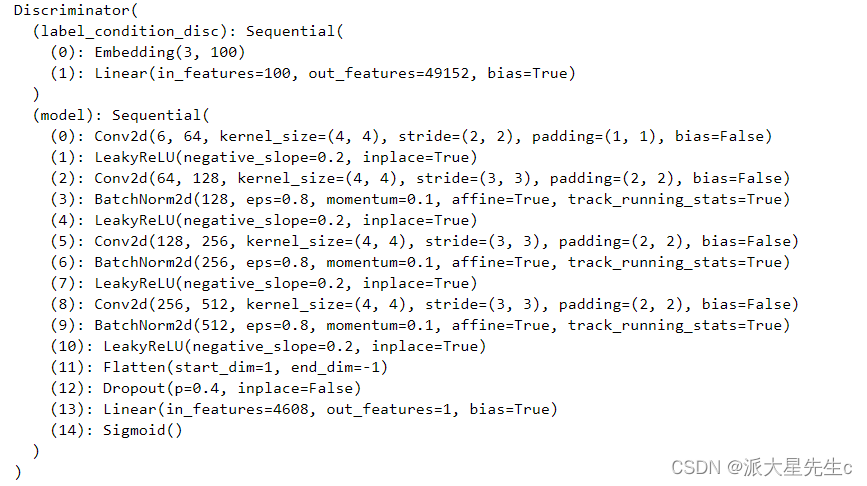
discriminator = Discriminator().to(device)
discriminator.apply(weights_init)
print(discriminator)
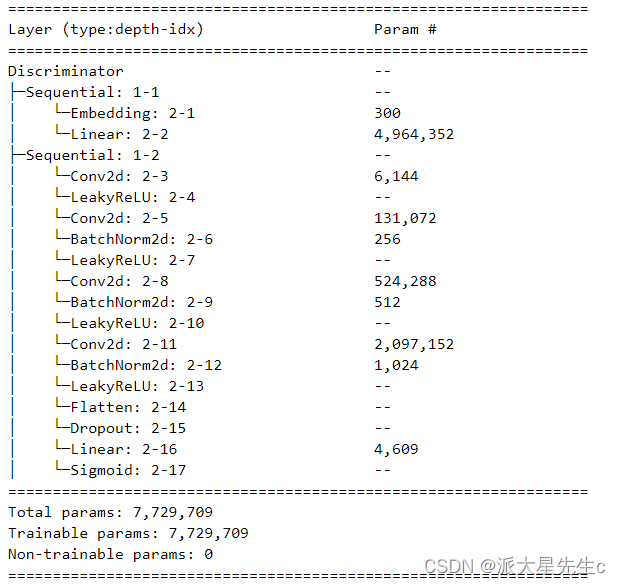
summary(discriminator)
a = torch.ones(2,3,128,128)
b = torch.ones(2,1)
b = b.long()
a = a.to(device)
b = b.to(device)
c = discriminator((a,b))
c.size()
torch.Size([2, 1])
三、训练模型
1. 定义损失函数
adversarial_loss = nn.BCELoss()
def generator_loss(fake_output, label):
gen_loss = adversarial_loss(fake_output, label)
return gen_loss
def discriminator_loss(output, label):
disc_loss = adversarial_loss(output, label)
return disc_loss
2. 定义优化器
learning_rate = 0.0002
G_optimizer = optim.Adam(generator.parameters(), lr = learning_rate, betas=(0.5, 0.999))
D_optimizer = optim.Adam(discriminator.parameters(), lr = learning_rate, betas=(0.5, 0.999))
3. 训练模型
# 设置训练的总轮数
num_epochs = 100
# 初始化用于存储每轮训练中判别器和生成器损失的列表
D_loss_plot, G_loss_plot = [], []
# 循环进行训练
for epoch in range(1, num_epochs + 1):
# 初始化每轮训练中判别器和生成器损失的临时列表
D_loss_list, G_loss_list = [], []
# 遍历训练数据加载器中的数据
for index, (real_images, labels) in enumerate(train_loader):
# 清空判别器的梯度缓存
D_optimizer.zero_grad()
# 将真实图像数据和标签转移到GPU(如果可用)
real_images = real_images.to(device)
labels = labels.to(device)
# 将标签的形状从一维向量转换为二维张量(用于后续计算)
labels = labels.unsqueeze(1).long()
# 创建真实目标和虚假目标的张量(用于判别器损失函数)
real_target = Variable(torch.ones(real_images.size(0), 1).to(device))
fake_target = Variable(torch.zeros(real_images.size(0), 1).to(device))
# 计算判别器对真实图像的损失
D_real_loss = discriminator_loss(discriminator((real_images, labels)), real_target)
# 从噪声向量中生成假图像(生成器的输入)
noise_vector = torch.randn(real_images.size(0), latent_dim, device=device)
noise_vector = noise_vector.to(device)
generated_image = generator((noise_vector, labels))
# 计算判别器对假图像的损失(注意detach()函数用于分离生成器梯度计算图)
output = discriminator((generated_image.detach(), labels))
D_fake_loss = discriminator_loss(output, fake_target)
# 计算判别器总体损失(真实图像损失和假图像损失的平均值)
D_total_loss = (D_real_loss + D_fake_loss) / 2
D_loss_list.append(D_total_loss)
# 反向传播更新判别器的参数
D_total_loss.backward()
D_optimizer.step()
# 清空生成器的梯度缓存
G_optimizer.zero_grad()
# 计算生成器的损失
G_loss = generator_loss(discriminator((generated_image, labels)), real_target)
G_loss_list.append(G_loss)
# 反向传播更新生成器的参数
G_loss.backward()
G_optimizer.step()
# 打印当前轮次的判别器和生成器的平均损失
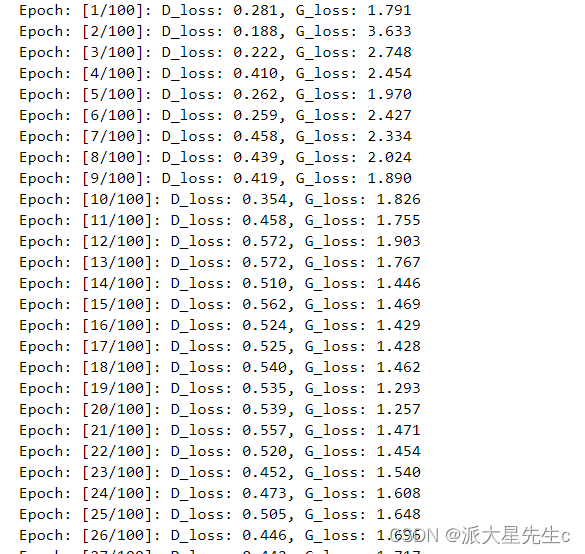
print('Epoch: [%d/%d]: D_loss: %.3f, G_loss: %.3f' % (
(epoch), num_epochs, torch.mean(torch.FloatTensor(D_loss_list)),
torch.mean(torch.FloatTensor(G_loss_list))))
# 将当前轮次的判别器和生成器的平均损失保存到列表中
D_loss_plot.append(torch.mean(torch.FloatTensor(D_loss_list)))
G_loss_plot.append(torch.mean(torch.FloatTensor(G_loss_list)))
if epoch%10 == 0:
# 将生成的假图像保存为图片文件
save_image(generated_image.data[:50], './images/sample_%d' % epoch + '.png', nrow=5, normalize=True)
# 将当前轮次的生成器和判别器的权重保存到文件
torch.save(generator.state_dict(), './training_weights/generator_epoch_%d.pth' % (epoch))
torch.save(discriminator.state_dict(), './training_weights/discriminator_epoch_%d.pth' % (epoch))
# 四、模型分析
## 1. 加载模型
~~~python
generator.load_state_dict(torch.load('./training_weights/generator_epoch_100.pth'), strict=False)
generator.eval()
# 导入所需的库
from numpy import asarray
from numpy.random import randn
from numpy.random import randint
from numpy import linspace
from matplotlib import pyplot
from matplotlib import gridspec
# 生成潜在空间的点,作为生成器的输入
def generate_latent_points(latent_dim, n_samples, n_classes=3):
# 从标准正态分布中生成潜在空间的点
x_input = randn(latent_dim * n_samples)
# 将生成的点整形成用于神经网络的输入的批量
z_input = x_input.reshape(n_samples, latent_dim)
return z_input
# 在两个潜在空间点之间进行均匀插值
def interpolate_points(p1, p2, n_steps=10):
# 在两个点之间进行插值,生成插值比率
ratios = linspace(0, 1, num=n_steps)
# 线性插值向量
vectors = list()
for ratio in ratios:
v = (1.0 - ratio) * p1 + ratio * p2
vectors.append(v)
return asarray(vectors)
# 生成两个潜在空间的点
pts = generate_latent_points(100, 2)
# 在两个潜在空间点之间进行插值
interpolated = interpolate_points(pts[0], pts[1])
# 将数据转换为torch张量并将其移至GPU(假设device已正确声明为GPU)
interpolated = torch.tensor(interpolated).to(device).type(torch.float32)
output = None
# 对于三个类别的循环,分别进行插值和生成图片
for label in range(3):
# 创建包含相同类别标签的张量
labels = torch.ones(10) * label
labels = labels.to(device)
labels = labels.unsqueeze(1).long()
print(labels.size())
# 使用生成器生成插值结果
predictions = generator((interpolated, labels))
predictions = predictions.permute(0,2,3,1)
pred = predictions.detach().cpu()
if output is None:
output = pred
else:
output = np.concatenate((output,pred))
torch.Size([10, 1])
torch.Size([10, 1])
torch.Size([10, 1])
output.shape
(30, 128, 128, 3)
nrow = 3
ncol = 10
fig = plt.figure(figsize=(15,4))
gs = gridspec.GridSpec(nrow, ncol)
k = 0
for i in range(nrow):
for j in range(ncol):
pred = (output[k, :, :, :] + 1 ) * 127.5
pred = np.array(pred)
ax= plt.subplot(gs[i,j])
ax.imshow(pred.astype(np.uint8))
ax.set_xticklabels([])
ax.set_yticklabels([])
ax.axis('off')
k += 1
plt.show()

四、理论基础
1.DCGAN原理
条件生成对抗网络(CGAN)是在生成对抗网络(GAN)的基础上进行了一些改进。对于原始GAN的生成器而言,其生成的图像数据是随机不可预测的,因此我们无法控制网络的输出,在实际操作中的可控性不强。
针对上述原始GAN无法生成具有特定属性的图像数据的问题,Mehdi Mirza等人在2014年提出了条件生成对抗网络(CGAN),全称为Conditional Generative Adversarial Network。与标准的 GAN 不同,CGAN 通过给定额外的条件信息来控制生成的样本的特征。这个条件信息可以是任何类型的,例如图像标签、文本标签等。
在 CGAN 中,生成器(Generator)和判别器(Discriminator)都接收条件信息。生成器的目标是生成与条件信息相关的合成样本,而判别器的目标是将生成的样本与真实样本区分开来。当生成器和判别器通过反馈循环不断地进行训练时,生成器会逐渐学会如何生成符合条件信息的样本,而判别器则会逐渐变得更加准确。
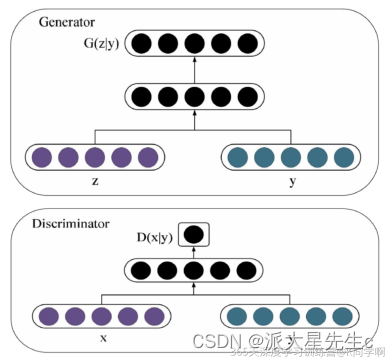
由上图的网络结构可知,条件信息y作为额外的输入被引入对抗网络中,与生成器中的噪声z合并作为隐含层表达;而在判别器D中,条件信息y则与原始数据x合并作为判别函数的输入。
2.DCGAN网络
DCGAN(Deep Convolutional Generative Adversarial Network)是一种基于卷积神经网络的生成对抗网络。它在原始GAN的基础上引入了深度卷积网络来增强模型的表达能力和生成图像的质量。
DCGAN的核心思想是将生成器(Generator)和判别器(Discriminator)组合在一起,并通过互相对抗的训练方式来不断优化两个网络。生成器的目标是生成逼真的图像样本,而判别器的目标是将生成的样本与真实样本区分开来。
具体而言,DCGAN采用了以下关键技术:
-
使用卷积层代替全连接层:在生成器和判别器中,使用卷积层来处理图像数据,这使得网络可以有效地捕捉到图像的局部纹理特征和全局结构信息。同时,卷积层还减少了参数数量,降低了计算复杂度。
-
采用批量归一化(Batch Normalization):为了加速训练过程并稳定模型的学习过程,DCGAN在生成器和判别器的每一层后面都添加了批量归一化层。批量归一化可以使得网络对输入数据的变动更加鲁棒,并且有助于减少梯度消失和梯度爆炸问题。
-
使用LeakyReLU激活函数:为了避免生成器和判别器中的神经元出现“死亡”现象(即永远不会激活),DCGAN采用了LeakyReLU激活函数。它可以在负输入时引入一个小的斜率,使得信息可以更好地传播。
-
去除全连接层:与原始的GAN不同,DCGAN去除了生成器和判别器中的全连接层,这样可以避免过拟合的问题,降低了模型的复杂度。
通过以上技术的应用,DCGAN可以生成逼真的图像样本,并具备一定的生成控制能力。
3.个人感悟
DCGAN作为一种生成对抗网络的改进模型,为我们提供了一种有条件控制生成图像的方式。通过给定额外的条件信息,我们可以精确地生成符合要求的图像样本,这对于许多实际应用非常有意义。
同时,DCGAN也展示了深度卷积网络在图像生成任务中的强大能力。通过使用深度卷积网络,模型可以有效地捕捉到图像中的局部特征和全局结构,生成的图像更加真实自然。
然而,在使用DCGAN进行图像生成时,还需要考虑模型的训练稳定性和收敛性的问题。由于生成对抗网络的优化过程相对复杂,需要平衡生成器和判别器的能力,以及调整超参数等方面的工作。
总之,DCGAN作为一种生成对抗网络的改进模型,不仅提高了图像生成的可控性和质量,同时也展示了深度卷积网络在图像生成任务中的重要作用。我对于这种模型的发展和应用潜力感到非常期待。