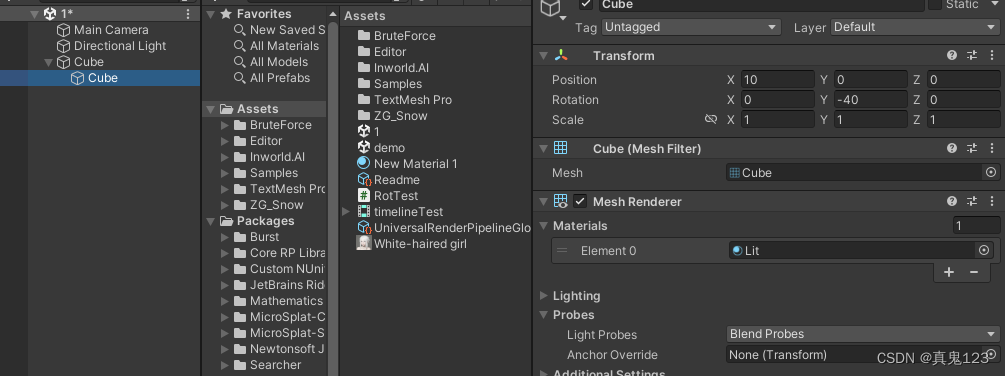
如图 父物体Transfrom信息如下

子物体坐标如下
代码如下
将pos点,基于父物体scale进行缩放。
在用父物体旋转量* pos
再加上父物体的坐标。
即为子物体的世界坐标。
void Start()
{
Vector3 pos = new Vector3(1, 2, 3);
Vector3 parentPos = new Vector3(10, 20, 30);
Quaternion parentRot = Quaternion.Euler(10, 20, 30);
Vector3 parentSize = new Vector3(1, 2, 3);
pos.x *= parentSize.x;
pos.y *= parentSize.y;
pos.z *= parentSize.z;
Vector3 reslut = parentRot * pos;
reslut += parentPos;
Debug.Log(reslut);
}