💖作者:小树苗渴望变成参天大树🎈
🎉作者宣言:认真写好每一篇博客💤
🎊作者gitee:gitee✨
💞作者专栏:C语言,数据结构初阶,Linux,C++ 动态规划算法🎄
如 果 你 喜 欢 作 者 的 文 章 ,就 给 作 者 点 点 关 注 吧!

文章目录
- 前言
- 一、选择题
- 二、程序题
- 三、问答题
前言
今天博主专门出一篇继承和多态的相关的题目,为了就是让大家更好的进行掌握继承和多态,而且这里面有几题是比较坑的。我会一一给大家解释清楚的,话不多说,我们开始进入正文
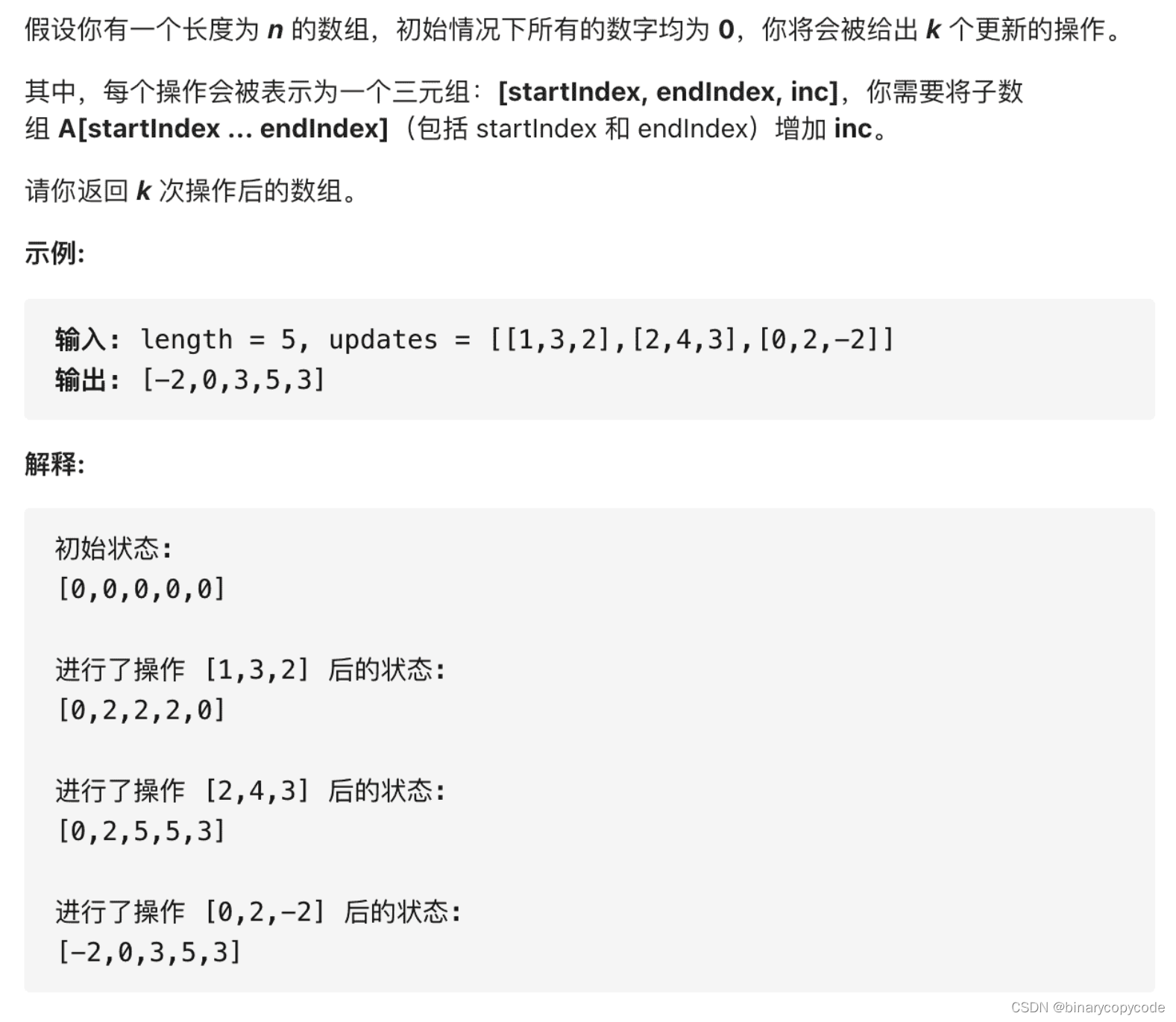
一、选择题
- 下面哪种面向对象的方法可以让你变得富有(A )
A: 继承 B: 封装 C: 多态 D: 抽象 - (D )是面向对象程序设计语言中的一种机制。这种机制实现了方法的定义与具体的对象无关,
而对方法的调用则可以关联于具体的对象。
A: 继承 B: 模板 C: 对象的自身引用 D: 动态绑定 - 面向对象设计中的继承和组合,下面说法错误的是?(C)
A:继承允许我们覆盖重写父类的实现细节,父类的实现对于子类是可见的,是一种静态复用,也称为白盒复用
B:组合的对象不需要关心各自的实现细节,之间的关系是在运行时候才确定的,是一种动态复用,也称为黑盒复用
C:优先使用继承,而不是组合,是面向对象设计的第二原则
D:继承可以使子类能自动继承父类的接口,但在设计模式中认为这是一种破坏了父类的封装性的表现 - 以下关于纯虚函数的说法,正确的是(A )
A:声明纯虚函数的类不能实例化对象 B:声明纯虚函数的类是虚基类
C:子类必须实现基类的纯虚函数 D:纯虚函数必须是空函数 - 关于虚函数的描述正确的是( C)
A:派生类的虚函数与基类的虚函数具有不同的参数个数和类型 B:内联函数不能是虚函数
C:派生类必须重新定义基类的虚函数 D:虚函数可以是一个static型的函数 - 关于虚表说法正确的是( D)
A:一个类只能有一张虚表
B:基类中有虚函数,如果子类中没有重写基类的虚函数,此时子类与基类共用同一张虚表
C:虚表是在运行期间动态生成的
D:一个类的不同对象共享该类的虚表 - 假设A类中有虚函数,B继承自A,B重写A中的虚函数,也没有定义任何虚函数,则( C)
A:A类对象的前4个字节存储虚表地址,B类对象前4个字节不是虚表地址
B:A类对象和B类对象前4个字节存储的都是虚基表的地址
C:A类对象和B类对象前4个字节存储的虚表地址相同
D:A类和B类虚表中虚函数个数相同,但A类和B类使用的不是同一张虚表
二、程序题
#include<iostream>
using namespace std;
class A{
public:
A(char *s) { cout<<s<<endl; }
~A(){}
};
class B:virtual public A
{
public:
B(char *s1,char*s2):A(s1) { cout<<s2<<endl; }
};
class C:virtual public A
{
public:
C(char *s1,char*s2):A(s1) { cout<<s2<<endl; }
};
class D:public B,public C
{
public:
D(char *s1,char *s2,char *s3,char *s4):B(s1,s2),C(s1,s3),A(s1)
{ cout<<s4<<endl;}
};
int main() {
D *p=new D("class A","class B","class C","class D");
delete p;
return 0;
}
A:class A class B class C class D B:class D class B class C class A
C:class D class C class B class A D:class A class C class B class D
这题是非常的坑的,我们发现这是一个菱形继承,而且使用的virtual解决了数据冗余和二义性的,我们重复的数据就是基类里面的,现在我们的基类的里面的内容本来在B里面和C里面都有,现在在公共的地方,所以此时的问题就是就变成了,我们A的构造函数调用几次的问题,因为是我们创建d对像,所以我们是D类的构造函数去调用A的构造函数,而B,C类中关于A类的构造函数那一部分就失效了,先进行父类的构造在进行子类的构造,先继承的先构造,所以此题的选择是A
但是B,C构造函数里面的调用A的构造函数不能去掉,因为B,C类会单独创建对象也要使用
class Base1 { public: int _b1; };
class Base2 { public: int _b2; };
class Derive : public Base1, public Base2 { public: int _d; };
int main(){
Derive d;
Base1* p1 = &d;
Base2* p2 = &d;
Derive* p3 = &d;
return 0;
}
A:p1 == p2 == p3 B:p1 < p2 < p3 C:p1 == p3 != p2 D:p1 != p2 != p3
这题在之前也有在之前也有对应的暗示,我们来画一个图来理解,因为不是多态,就是普通调用
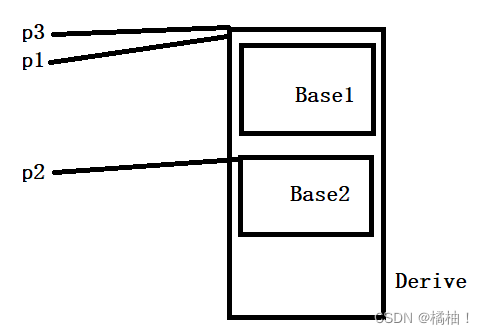
此题的正确答案就是C
class A
{
public:
virtual void func(int val = 1){ std::cout<<"A->"<< val <<std::endl;}
virtual void test(){ func();}
};
class B : public A
{
public:
void func(int val=0){ std::cout<<"B->"<< val <<std::endl; }
};
int main(int argc ,char* argv[])
{
B*p = new B;
p->test();
return 0;
}
A: A->0 B: B->1 C: A->1 D: B->0 E: 编译出错 F: 以上都不正确
这题我们要了解多态的调用,虚函数重写的本质什么,构成多态的条件是什么
这题构成多态吗?
首先我们看符不符合
第一点:构不构成虚函数的重写
我们看到fun的父类加了virtual子类加不加无所谓,也符合三同,我们的参数列表只要求类型一样就行了,第一点是满足了
第二点:基类的指针或者引用去调用
我们发现先通过调用fun是通过test去调用,而test虽然是虚函数但是没有重写,但继承到子类B的虚表里面的了,我们创建一个子类对象的指针,去调用test也是调用父类的,此时的this指针就是父类的,然后再去调用fun,就相当于this->fun,此时就是使用了基类的指针去调用虚函数,这个条件也满足了
通过上面两点的分析我们知道构成多态,我们p是指向子类对象的,按道理答案是D,但是这题却不是的,因为我们子类是重写了虚函数的定义,使用虚函数的头,定义使用自己的,所以答案是B,现实中没人这么设计,好好的吧参数给的值不一样干嘛呢,没什么意义。
三、问答题
- 什么是多态?
现在从两点回答1.静态的多态(函数重载)2.动态的多态(继承中的虚函数重写),两种都是更方便和灵活的多种形态的调用
- 多态的实现原理?
第一种是靠函数名修饰规则,第二种是虚函数表
- inline函数可以是虚函数吗?
答案是可以的,只是inline的特性就被忽略了,优先是虚函数。
- 静态成员可以是虚函数吗?
答:不能,编译时强制报错,不允许这样的语法存在因为静态成员函数没有this指针,使用类型::成员函数的调用方式无法访问虚函数表,所以静态成员函数无法放进虚函数表。
- 构造函数可以是虚函数吗?
答:不能,因为对象中的虚函数表指针是在构造函数初始化列表
阶段才初始化的,是在构造的时候有了虚函数表指针,然后再走初始化列表,构造在前,虚表指在后,所以不能
- 对象访问普通函数快还是虚函数更快?
答:首先如果是普通对象,是一样快的。如果是指针对象或者是引用对象,则调用的普通函数快,因为构成多态,运行时调用虚函数需要到虚函数表中去查找。
- 虚函数表是在什么阶段生成的
答:虚函数表是在编译阶段就生成的,一般情况下存在代码段(常量区)的。
注意:virtual关键在菱形继承的时候用过,里面的指针式虚基表的指针,指向的是存的偏移量的地方,在多态里面也使用了,里面存放的虚表指针,指向的是虚函数存放的地方
今天的题目分享就到这里了,大家下去自己去理解一下吧