文章目录
前言
一、延时函数
二、修改encoder外中断接口
1.中断调用接口
2.嫁接回调函数
3、新增digitalRead函数
三、添加编译项
四、编译,调试
总结
前言
今天移植的主要内容是simpleFoc的encoder,目标是转到电机,读出对应的角度及角度率。
一、延时函数
阅读encoder.cpp后,发现里面需要几个延时函数。由于stm32cubeMX生成工程后,sysTick默认为产生1ms中断,并且HAL_GetTick()函数记录了从开机起到当前的ms数。利用该接口编写millis()、micros()、delay()供 simpleFoc使用
掏出arduino里wiring.c文件,进行修改。
#include "Arduino.h"
#include "stm32f1xx_hal.h"
static void __empty() {
// Empty
}
void yield(void) __attribute__ ((weak, alias("__empty")));
#ifdef __cplusplus
extern "C" {
#endif
uint32_t millis(void)
{
// todo: ensure no interrupts
return HAL_GetTick();
}
// Interrupt-compatible version of micros
// Theory: repeatedly take readings of SysTick counter, millis counter and SysTick interrupt pending flag.
// When it appears that millis counter and pending is stable and SysTick hasn't rolled over, use these
// values to calculate micros. If there is a pending SysTick, add one to the millis counter in the calculation.
uint32_t micros(void)
{
uint32_t ticks, ticks2;
uint32_t pend, pend2;
uint32_t count, count2;
ticks2 = SysTick->VAL;
pend2 = !!((SCB->ICSR & SCB_ICSR_PENDSTSET_Msk)||((SCB->SHCSR & SCB_SHCSR_SYSTICKACT_Msk))) ;
count2 = HAL_GetTick();
do {
ticks=ticks2;
pend=pend2;
count=count2;
ticks2 = SysTick->VAL;
pend2 = !!((SCB->ICSR & SCB_ICSR_PENDSTSET_Msk)||((SCB->SHCSR & SCB_SHCSR_SYSTICKACT_Msk))) ;
count2 = HAL_GetTick();
} while ((pend != pend2) || (count != count2) || (ticks < ticks2));
return ((count+pend) * 1000) + (((SysTick->LOAD - ticks)*(1048576/(SystemCoreClock/1000000)))>>20) ;
// this is an optimization to turn a runtime division into two compile-time divisions and
// a runtime multiplication and shift, saving a few cycles
}
// original function:
// uint32_t micros( void )
// {
// uint32_t ticks ;
// uint32_t count ;
//
// SysTick->CTRL;
// do {
// ticks = SysTick->VAL;
// count = GetTickCount();
// } while (SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk);
//
// return count * 1000 + (SysTick->LOAD + 1 - ticks) / (SystemCoreClock/1000000) ;
// }
void delay(uint32_t dwMs)
{
if (dwMs == 0)
return;
uint32_t start = HAL_GetTick();
do {
yield();
} while (HAL_GetTick() - start < dwMs);
}
#ifdef __cplusplus
}
#endif
二、修改encoder外中断接口
1.中断调用接口
一般编码器 doA doB会赋予的,所以在中断里尽量节约执行时间,并没有判断回调函数是否为空,而doIndex项,看例程里有时并没有赋予,所以在执行时判断了 if(functionZ) 再执行,否则stm32会异常,该处踩坑了。
typedef void (*pf_callbakck)(void);
static pf_callbakck functionA=nullptr;
static pf_callbakck functionB=nullptr;
static pf_callbakck functionZ=nullptr;
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
case M0_ENC_A_Pin:{
functionA();
}break;
case M0_ENC_B_Pin:{
functionB();
}break;
case M0_ENC_Z_Pin:{
if(functionZ)
functionZ();
}break;
default:break;
}
}
2.嫁接回调函数
代码如下:
void Encoder::enableInterrupts(void (*doA)(), void(*doB)(), void(*doIndex)())
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(doA != nullptr) functionA=doA;
if(doB != nullptr) functionB=doB;
GPIO_InitStruct.Pin = M0_ENC_A_Pin|M0_ENC_B_Pin;
GPIO_InitStruct.Pull = GPIO_NOPULL;
switch(quadrature){
case Quadrature::ON:
/*Configure GPIO pins : PBPin PBPin */
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING_FALLING;
break;
case Quadrature::OFF:
// A callback and B callback
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
break;
}
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = M0_ENC_Z_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(M0_ENC_Z_GPIO_Port, &GPIO_InitStruct);
// if index used initialize the index interrupt
if(hasIndex() && doIndex != nullptr)
functionZ=doIndex;
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}3、新增digitalRead函数
__inline__ bool digitalRead(int pin)
{
bool tmp=0;
switch(pin)
{
case M0_ENC_A_Pin:tmp=HAL_GPIO_ReadPin(M0_ENC_A_GPIO_Port, M0_ENC_A_Pin);break;
case M0_ENC_B_Pin:tmp=HAL_GPIO_ReadPin(M0_ENC_B_GPIO_Port, M0_ENC_B_Pin);break;
case M0_ENC_Z_Pin:tmp=HAL_GPIO_ReadPin(M0_ENC_Z_GPIO_Port, M0_ENC_Z_Pin);break;
default:break;
}
return tmp;
}三、添加编译项
如图所示:

四、编译,调试
测试代码如下:
#define __MAIN_CPP__
#include "simpleFoc_main.h"
#include "Print.h"
#include "hwSerial.h"
#include <SimpleFOC.h>
#include "main.h"
extern HardwareSerial Serial2;
#define Serial Serial2
extern "C" {
Encoder encoder = Encoder(M0_ENC_A_Pin, M0_ENC_B_Pin, 1000);
// interrupt routine intialisation
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
void setup() {
// enable/disable quadrature mode
encoder.quadrature = Quadrature::ON;
// check if you need internal pullups
encoder.pullup = Pullup::USE_EXTERN;
// initialise encoder hardware
encoder.init();
// hardware interrupt enable
encoder.enableInterrupts(doA, doB);
Serial.println("Encoder ready");
_delay(1000);
}
void loop() {
// iterative function updating the sensor internal variables
// it is usually called in motor.loopFOC()
// not doing much for the encoder though
// encoder.update();
// display the angle and the angular velocity to the terminal
Serial.print(encoder.getAngle());
Serial.print("\t");
Serial.println(encoder.getVelocity());
_delay(100);
}
}编译下载,转动电机,运行结果如下:
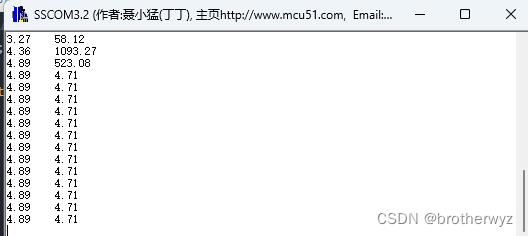
总结
运行结果,编码器程序移植工作正常。只是simpleFoc采用的是外部中断方式进行采集,看了stm32定时器章节,里面有编码器接口功能,后续有必要的情况下会对该部分以定时器接口进行实现。