众所周知,想要使用rosdep,需要两个步骤:
sudo rosdep init
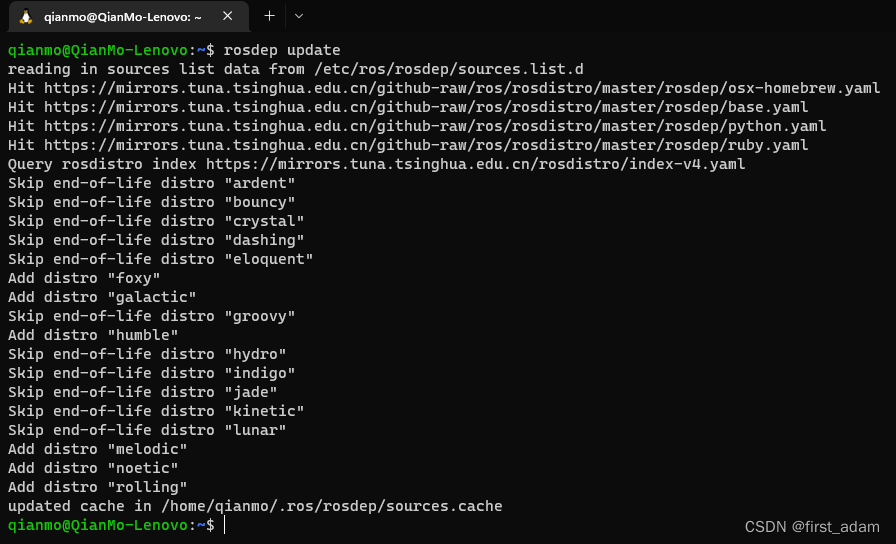
rosdep update
其中,第一步就是下载了一个文件,第二步是从服务器下载一些数据。
但是因为国内的网络的原因,这两步都有一点困难。但是可以使用tuna的镜像站来完成这个步骤:rosdistro 镜像使用帮助。
现在我们就看下是如何解决这两步的。
首先,需要下载20-default.list到/etc/ros/rosdep/sources.list.d/。这个就很简单了,直接创建目录,下载文件就好:
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
sudo curl -o /etc/ros/rosdep/sources.list.d/20-default.list https://mirrors.tuna.tsinghua.edu.cn/github-raw/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
运行以上两条指令,就和运行sudo rosdep init是一模一样的效果。只是,此时下载的源是tuna的,直接运行rosdep update是会报错的,那么就需要第二步了:
export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml
其实也就是指定了一个软件源。当然,这个指令只会对当前终端有效,如果想要永远有效,直接写到~/.bashrc就可以了:
echo 'export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml' >> ~/.bashrc
source ~/.barshrc
完成之后rosdep update就不会有任何问题了,又快又稳。
转载:
https://www.guyuehome.com/39865
![P3611 [USACO17JAN] Cow Dance Show S](https://img-blog.csdnimg.cn/9a99efbf48524136ac8f270ebcdb519a.png)