目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
针对Stevens和Lewis描述的小型飞机纵向动力学的非线性动态,研究非线性动态反演控制器可以是一个有趣的课题。动态反演控制器的目标是通过了解系统的动力学方程和状态信息,从而在实时中实现对系统的反演和控制。
下面是研究步骤:
1. 系统建模:首先,你需要建立小型飞机的纵向动力学模型。这可能包括纵向运动方程、气动力模型以及控制效应模型等。这些方程需要考虑飞行器的质量、惯性、空气动力学特性等因素。你可以参考Stevens和Lewis的工作以及其他相关文献,以获取合适的模型。
2. 系统特性分析:在完成系统建模后,你可以进行系统特性分析。使用非线性系统理论,分析系统的稳定性、可控性和可观测性等特性。这些分析将有助于理解系统行为和设计控制器。
3. 动态反演控制器设计:基于系统的动力学方程和特性分析结果,设计动态反演控制器。动态反演控制器的目标是通过在线估计系统未知参数和外部扰动,实时计算出对应的控制指令。这种控制器的优势在于对系统参数变化和未建模动态的鲁棒性。
4. 仿真与验证:实施动态反演控制器,并使用仿真工具模拟小型飞机的纵向运动。通过输入一组初始条件和控制指令,在仿真环境中进行验证和评估控制器的性能。可以使用 MATLAB、Simulink 或其他仿真软件来进行此步骤。
5. 实际实验:如果仿真结果令人满意,可以考虑在实际小型飞机上实施该控制器,并进行飞行试验。在实验中收集数据,并与仿真结果进行比较和分析,以验证控制器的有效性。
需要注意的是,小型飞机的纵向动力学是一个复杂的问题,需要掌握相关的飞行器动力学和控制理论知识。同时,确保你对动态反演控制器的基本原理和设计方法有充分的了解。
📚2 运行结果
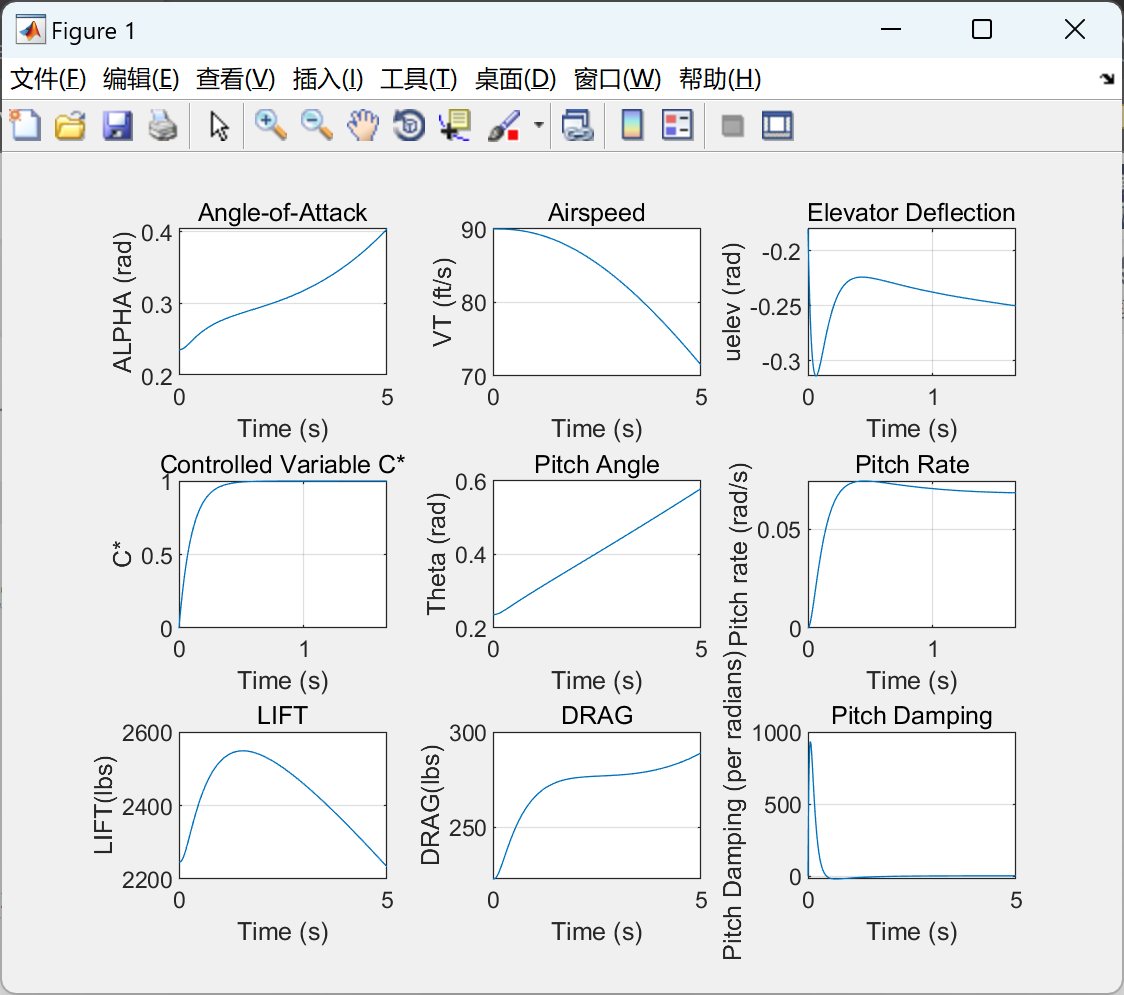
部分代码:
%% COMMAND INPUT
r=1; % Reference C* demand
rdot=0; % Reference rate
% Outputs
nz=(LIFT*cos(ALPHA)+DRAG*sin(ALPHA))/(G*MASS)-cos(THETA); % Normal acceleration [eq (2)]
nzp=nz+15*MOM/(G*IYY); % Normal acceleration at pilot's station [eq (3)]
cstar=nzp+12.4*Q; % Controlled C* variable [eq(4)]
y=cstar; % Output y=h(x)
%% DYNAMIC INVERSION CONTROL INPUT
e=r-y; % error
Fctrl=dhdx*f; % F(x)
Gctrl=dhdx*g; % G(x)
K=10; % Linear control gain
uelev=(-Fctrl+rdot+K*e)/Gctrl; % Control
%% Model State Equations
xdot=zeros(5,1);
xdot(1)=(FT*cos(ALPHA)-DRAG-WEIGHT*sin(GAMMA))/MASS; % Airspeed rate
xdot(2)=(-FT*sin(ALPHA)-LIFT+WEIGHT*cos(GAMMA))/(MASS*VT)+Q;% AoA rate
xdot(3)=Q; % Pitch rate
xdot(4)=MOM/IYY; % Pitch acceleration
xdot(5)=-20.2*EL+20.2*uelev; % Elevator rate
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]B.L. Steven & F.L. Lewis (2003) “Aircraft Flight Control & Simulation”, John Wiley (edition 2)