机器人开发--雷达lidar
- 1 介绍
- 2 分类
- 2.1 整体分类
- 2.2 机械式(三角&ToF)
- 三角测距激光雷达
- ToF测距激光雷达
- 3 机械式单线ToF激光雷达
- 3.1 扫描原理
- 3.2 不同材料反射率
- 3.3 核心参数
- 参考
1 介绍
激光雷达(英文:Laser Radar ),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。
2 分类
2.1 整体分类
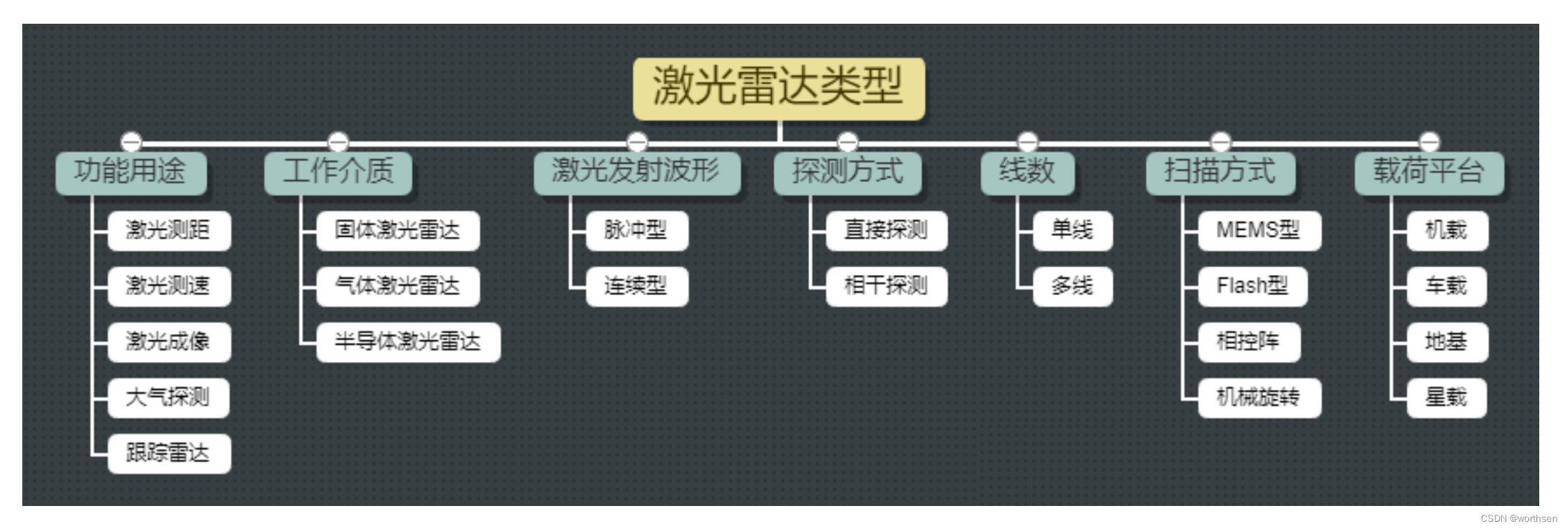
2.2 机械式(三角&ToF)
其中机械式激光雷达使用了不同的测距原理,主要可分为三角测距和ToF测距两类,使得雷达整体设计在尺寸、性能和成本上有较大差异。
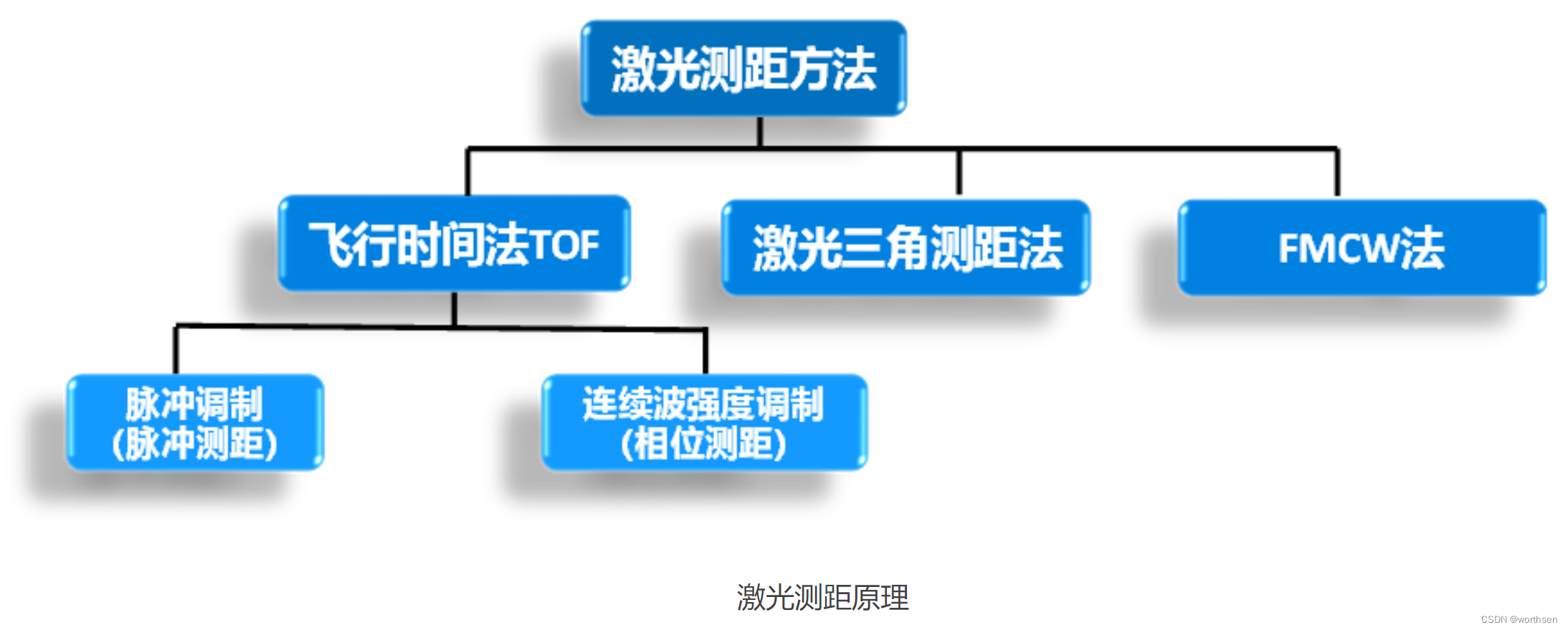
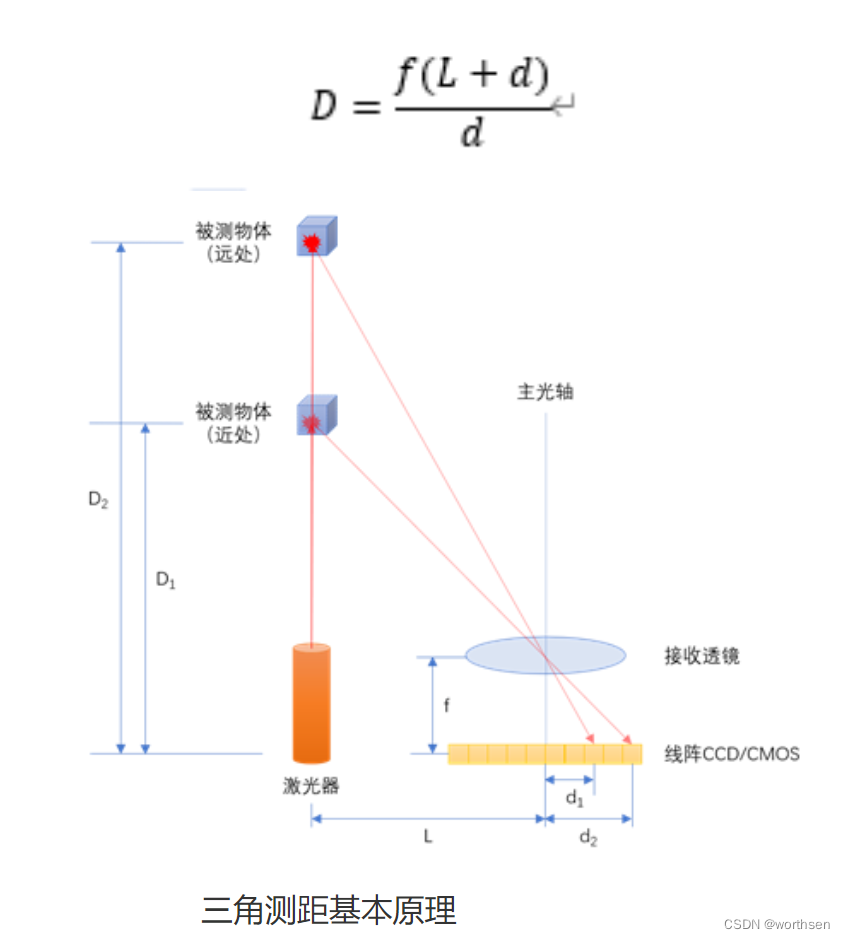
三角测距激光雷达
雷达测距模块向外发射红外激光,入射到被测物体上之后,部分散射光经接收透镜汇聚到线阵图像传感器(CCD/CMOS)上成像。由图中的几何关系可知,位于不同距离的物体。
f:接收透镜的焦距
L:发射光路光轴与接收透镜主光轴之间的偏移(即基线距离)
- 三角测距的距离分辨率会随着距离的变远而急速下降。
- 为了达到一定的距离分辨率,三角测距激光雷达往往都会使用较高分辨率的线阵图像传感器,通常具有数千个像素点,每次测距时需要将这些像素点的灰度值读出并交给DSP处理,整个读出和处理的过程需要耗费一定时间,从而限制了三角测距激光雷达的数据速率。
- 成本低,能做到百元级,扫地机器人能大范围使用就是这个原因。
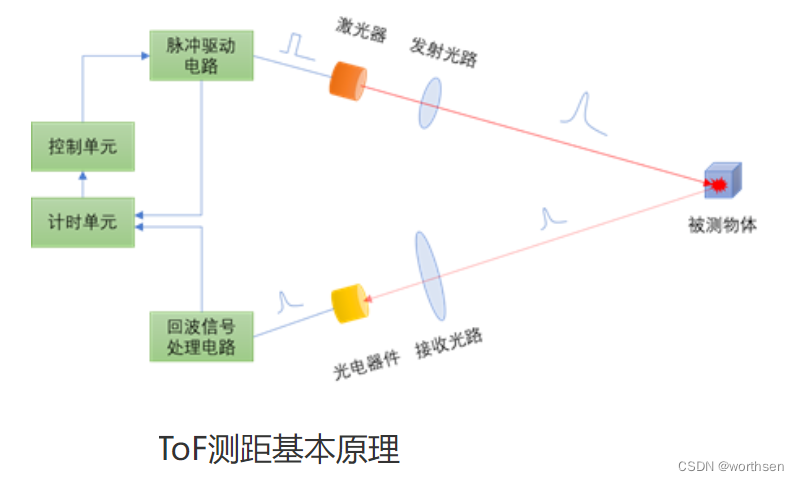
ToF测距激光雷达
Time of Flight,飞行时间测距法。
①开始测距时,脉冲驱动电路驱动激光器发射一个持续时间极短但瞬时功率非常高的光脉冲,同时计时单元启动计时;
②光脉冲经发射光路出射后,到达被测物体的表面并向各方向散射。测距模块的接收光路收到部分散射光能量,通过光电器件转化为光电流,输送给回波信号处理电路;
③回波信号处理电路将光电流转化为电压信号,经过一级或数级放大并调理后,得到一个回波信号对应的电脉冲,用于触发计时单元停止计时;
④此时,计时单元记录的时间间隔就代表了激光脉冲从发射到返回的全程所用的时间,使用这个时间值乘以光速并除以2,即可得到测距单元与被测目标之间的距离值。
测量发射波脉冲与目标回波脉冲之间的时间间隔,即测量激光脉冲从激光器到待测目标之间的往返时间T,即可得到目标距离 S = cT / 2,其中c为光在空气中的传播速度(3×10^8m/s)。
理论上,1cm测距,光飞行时间是67ps【皮秒】,1m测距,光飞行时间是6.7ns【纳秒】,由此可见,计数器很重要。
- ToF测距的工作条件比较极端,非常大(脉冲发射峰值)、非常弱(脉冲回波)和非常快(纳秒/皮秒级别)的信号,这就对整个电路的驱动能力、带宽和噪声抑制水平提出了很高的要求。
- ToF通过测量光脉冲的飞行时间来计算目标距离,而计时的精度不会因距离变远而发生改变,这样在整个量程内,ToF测距的距离分辨率都不会有实质性的变化。
- ToF测距处理的都是高速脉冲信号,由此而来的好处是整个测量过程耗时极短,可以很轻松地做到非常高的测量频率。
- 激光雷达lidar目前的技术难点在哪,关键技术都有哪些? - 十一号组织的回答 - 知乎
3 机械式单线ToF激光雷达
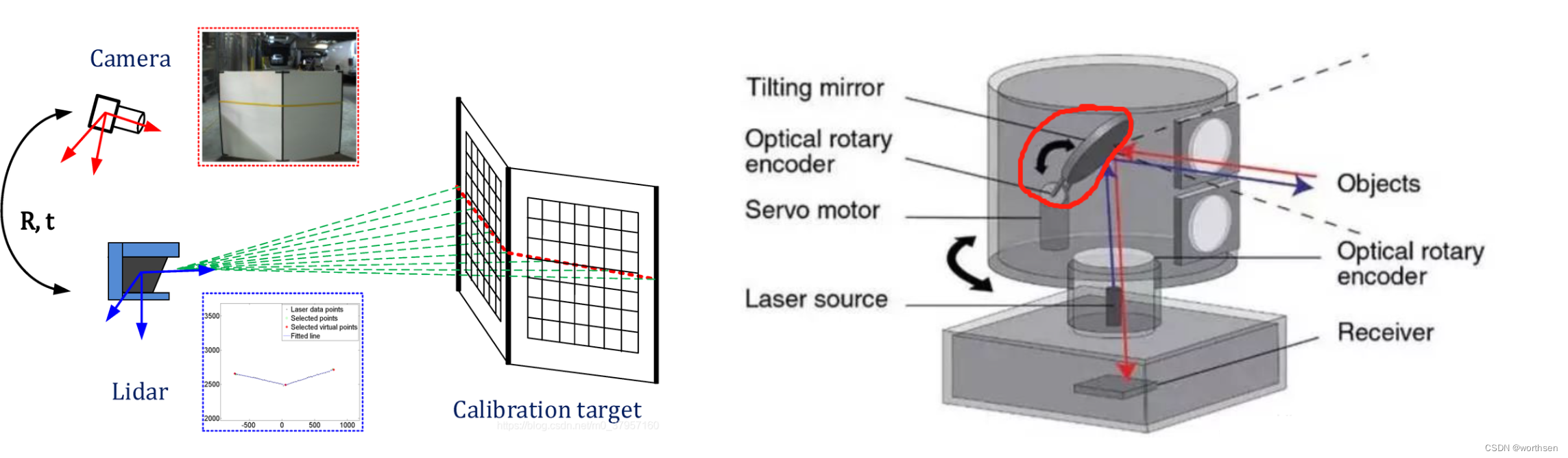
3.1 扫描原理
单线激光雷达的工作原理是发射器在激光雷达内部进行匀速的旋转,每旋转一个小角度(称之为角分辨率)即发射一次激光,轮巡一定的角度后,就生成了一帧完整的数据。但也意味着单线激光雷达只能识别同一高度一排点阵,只能描述线状信息,无法描述面以及高度。下图为扫描的原理图:
3.2 不同材料反射率


3.3 核心参数
- 扫描频率:即转速,10Hz就是一秒转10圈。
- 帧率:即代表一秒钟内激光雷达电机旋转的圈数,也就是每秒钟完成一圈扫描的次数。激光雷达输出的图像也被称为“点云”图像。
一幅点云图像代表一帧,对应到激光雷达内部就是电机旋转一圈完成扫描。
由于出厂后的激光雷达的采样率是一定的,因此帧率越高,角分辨率越低;帧率越低,角分辨率越高。 - 角分辨率:即相邻两个点之间的夹角。
- 采样率表示激光雷达每秒钟进行有效采集的次数,可直观理解为一秒内产生的点云数目。采样率可以通过角分辨率和帧率计算:
角分辨率0.08°时,每一帧的点云数目:360°/0.08°= 4500;每秒10帧,则每秒的点云数目:4500×10=45000;所以该激光雷达的采样率为45kHz。
参考
1、SICK 单线激光雷达LMS511_Upupup6的博客-CSDN博客_西克511雷达接线图
2、优劣几何?三角法和TOF激光雷达大解析!_奥比中光3D视觉开发者社区的博客-CSDN博客_三角雷达 csdn
3、激光雷达中三角测距与ToF测距的原理及比较-电子发烧友网
4、激光雷达(以激光器为辐射源雷达)_百度百科
5、激光雷达的7大分类讲解_思岚科技 SLAMTEC的博客-CSDN博客_激光雷达分类
6、激光雷达lidar目前的技术难点在哪,关键技术都有哪些? - 十一号组织的回答 - 知乎
7、万字长文文带你了解自动驾驶重要传感器——激光雷达_半甜田田的博客-CSDN博客
8、单线激光雷达 | 仙工智能帮助中心
9、「权记见闻」一看就懂,3分钟讲清激光雷达的工作原理
10、# 全面解析激光雷达
11、激光雷达扫描频率、角分辨率、帧率与采样率的计算方法_源代码杀手的博客-CSDN博客_角分辨率



![[附源码]计算机毕业设计基于Web的绿色环保网站Springboot程序](https://img-blog.csdnimg.cn/3e59ea8ec78b4091a5eba0c556c5b643.png)