目录
- 一、前言
- 二、线性回归
- 2.1 训练代码
- 2.2 绘图部分代码
- 2.3 numpy 数组的保存和导入代码
- 2.4 完整代码
- 三、numpy矩阵的保存
- 四、模型的保存和导入
- 4.1 保存模型
- 4.2 导入模型
- 五、卷积层
- 5.1 Conv2d
- 5.1.1 函数定义
- 5.1.2 参数说明
- 5.1.3 测试代码
- 5.1.4 最终结果
- 5.2 Conv1d
- 5.2.1 函数定义
- 5.2.2 参数说明
- 5.2.3 测试代码
- 5.2.4 最终结果
- 5.2.5 核心代码
- 六、池化层
- 6.1 max_pool2d
- 6.2 avg_pool2d
- 6.3 max_pool1d
- 七、后记
PyTorch——开源的Python机器学习库
一、前言
本想着一篇博文直接写完基于PyTorch的深度学习实战,可写着写着发现字数都上万了。考虑到读者可能花了大力气对这么一篇博文看到失去了对PyTorch神经网络的耐心,同时也为了我个人对文章排版的整理,还是分成了分卷阅读。
这里贴一下上篇博文:
[深度学习实战]基于PyTorch的深度学习实战(上)[变量、求导、损失函数、优化器]
还有贴上博文的社区帖子:
[有红包][深度学习实战]基于PyTorch的深度学习实战(上)[变量、求导、损失函数、优化器]
二、线性回归
线性回归也叫 regression,它是一个比较简单的模拟线性方程式的模型。线性方程式我们应该都学过吧,就是类似这样:
Y=wX+b
其中 w 是系数,b 是位移,它是一条笔直的斜线。
那么我们假设给定一条模拟直线的点,每个点偏移这条直线很小的范围,我们要用到随机函数来模拟这个随机的偏移。
首先可以定义一个随机种子,随机种子基本不影响随机数的值,也可以不定义随机种子。随机数值在 0~1 之间。
例如:torch.manual_seed(1),设置随机种子为 1。
size=10
0.2*torch.rand(size)
这里我们不打算使用 pytorch 的随机函数,毕竟 numpy 中已经提供了随机函数,我们的数据是生成 200 个 X 和 Y,模拟参数 w 为 0.5。
代码:
import numpy as np
from numpy import random
import matplotlib.pyplot as plt
X = np.linspace(-1, 1, 200)
Y = 0.5 * X + 0.2* np.random.normal(0, 0.05, (200, ))
plt.scatter(X,Y)
plt.show()
#将X,Y转成200 batch大小,1维度的数据
X=Variable(torch.Tensor(X.reshape(200,1)))
Y=Variable(torch.Tensor(Y.reshape(200,1)))
图形:
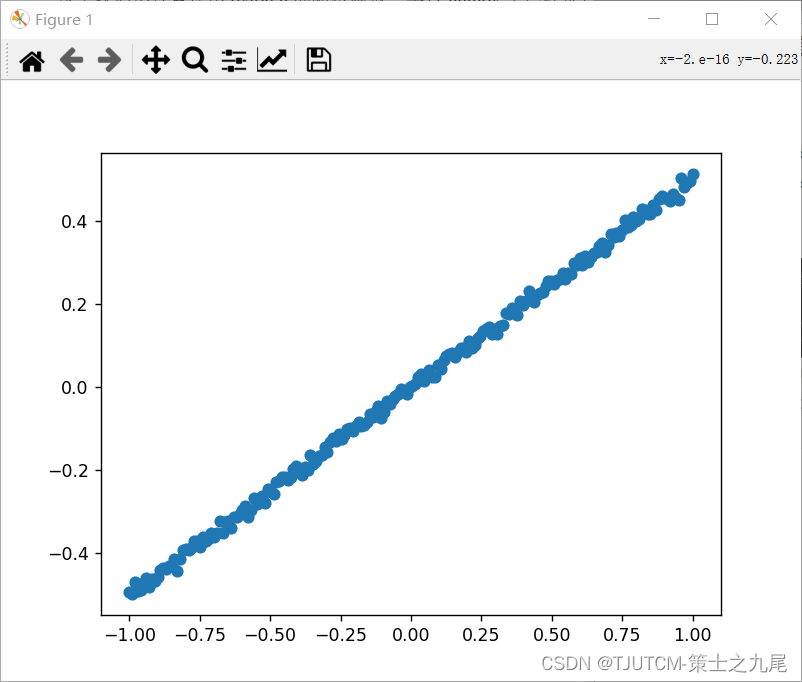
注意:这里要将输入数据转换成 (batch_size,dim) 格式的数据,添加一个批次的维度。
现在的任务是给定这些散列点 (x,y) 对,模拟出这条直线来。这是一个简单的线性模型,我们先用一个简单的 1→1 的 Linear 层试试看。
示例代码:
# 神经网络结构
model = torch.nn.Sequential(
torch.nn.Linear(1, 1),
)
optimizer = torch.optim.SGD(model.parameters(), lr=0.5)
loss_function = torch.nn.MSELoss()
2.1 训练代码
for i in range(300):
prediction = model(X)
loss = loss_function(prediction, Y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
2.2 绘图部分代码
plt.figure(1, figsize=(10, 3))
plt.subplot(131)
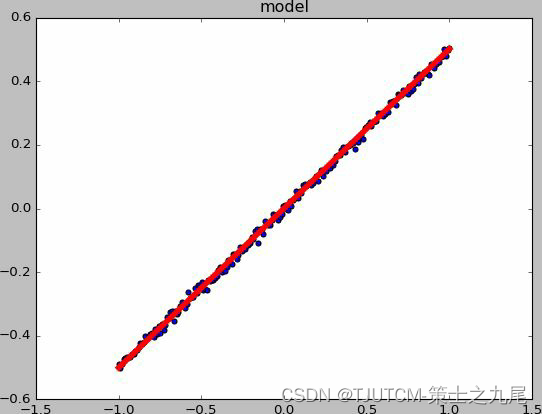
plt.title('model')
plt.scatter(X.data.numpy(), Y.data.numpy())
plt.plot(X.data.numpy(), prediction.data.numpy(), 'r-', lw=5)
plt.show()
最后的显示结果如图所示,红色是模拟出来的回归曲线:
2.3 numpy 数组的保存和导入代码
np.save("pred.npy",prediction.data.numpy())
pred= numpy.load("pred.npy")
2.4 完整代码
import numpy as np
from numpy import random
import matplotlib.pyplot as plt
import torch
from torch.autograd import Variable
X = np.linspace(-1, 1, 200)
Y = 0.5 * X + 0.2* np.random.normal(0, 0.05, (200, ))
X=Variable(torch.Tensor(X.reshape(200,1)))
Y=Variable(torch.Tensor(Y.reshape(200,1)))
print(X)
model = torch.nn.Sequential(
torch.nn.Linear(1, 1)
)
optimizer = torch.optim.SGD(model.parameters(), lr=0.5)
loss_function = torch.nn.MSELoss()
for i in range(300):
prediction = model(X)
loss = loss_function(prediction, Y)
print("loss:",loss)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(prediction.data.numpy())
plt.figure(1, figsize=(10, 3))
plt.subplot(131)
plt.title('model')
plt.scatter(X.data.numpy(), Y.data.numpy())
plt.plot(X.data.numpy(), prediction.data.numpy(), 'r-', lw=5)
plt.show()
三、numpy矩阵的保存
import numpy as np
a=np.array(2)
np.save("nm.npy",a)
a = np.load("nm. npy ")
其中 np 是 import numpy as np 的 np。a 是对应的 numpy 数组,"nm. npy"是文件名称。
四、模型的保存和导入
每次定义和训练一个模型都要花费很长的时间,我们当然希望有一种方式可以将训练好的模型和参数保存下来,下一次使用的时候直接导入模型和参数,就跟一个已经训练好的神经网络模型一样。幸运的是,pytorch 提供了保存和导入方法。
4.1 保存模型
# 保存整个神经网络的结构和模型参数
torch.save(mymodel, 'mymodel.pkl')
# 只保存神经网络的模型参数
torch.save(mymodel.state_dict(), 'mymodel_params.pkl')
4.2 导入模型
mymodel = torch.load('mymodel.pkl')
五、卷积层
卷积层是用一个固定大小的矩形区去席卷原始数据,将原始数据分成一个个和卷积核大小相同的小块,然后将这些小块和卷积核相乘输出一个卷积值(注意:这里是一个单独的值,不再是矩阵了)。
卷积的本质就是用卷积核的参数来提取原始数据的特征,通过矩阵点乘的运算,提取出和卷积核特征一致的值,如果卷积层有多个卷积核,则神经网络会自动学习卷积核的参数值,使得每个卷积核代表一个特征。
这里我们拿最常用的 conv2d 和 conv1d 举例说明卷积过程的计算。
5.1 Conv2d
conv2d 是二维度卷积,对数据在宽度和高度两个维度上进行卷积。
5.1.1 函数定义
torch.nn.functional.conv2d(input, weight, bias=None, stride=1, padding=0, dilation
5.1.2 参数说明
input:输入的Tensor数据,格式为 (batch,channels,H,W),四维数组,第一维度是样本数量,第二维度是通道数或者记录数,三、四维度是高度和宽度。
weight:卷积核权重,也就是卷积核本身,是一个四维度数组,(out_channels, in_channels/groups, kH, kW)。 Out_channels 是卷积核输出层的神经元个数,也就是这层有多少个卷积核;==in_channels ==是输入通道数,kH 和 kW 是卷积核的高度和宽度。
bias:位移参数,可选项,一般不用管。
stride:滑动窗口,默认为 1,指每次卷积对原数据滑动 1 个单元格。
padding:是否对输入数据填充 0。Padding 可以将输入数据的区域改造成卷积核大小的整数倍,这样对不满足卷积核大小的部分数据就不会忽略了。通过 padding 参数指定填充区域的高度和宽度,默认 0(就是填充区域为0,不填充的意思)。
dilation:卷积核之间的空格,默认1。
groups:将输入数据分组,通常不用管这个参数,没有太大意义。
5.1.3 测试代码
import torch
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
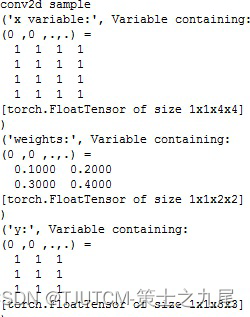
print("conv2d sample")
a=torch.ones(4,4)
x = Variable(torch.Tensor(a))
x=x.view(1,1,4,4)
print("x variable:", x)
b=torch.ones(2,2)
b[0,0]=0.1
b[0,1]=0.2
b[1,0]=0.3
b[1,1]=0.4
weights = Variable(b)
weights=weights.view(1,1,2,2)
print ("weights:",weights)
y=F.conv2d(x, weights, padding=0)
print ("y:",y)
5.1.4 最终结果
我们看看它是怎么计算的:
(1) 原始数据大小是1 * 1 * 4 * 4,1 * 1我们忽略掉,就是一个样本,每个样本一个通道的意思。4 * 4说明每个通道的数据是4 * 4大小的。而卷积核的大小是2 * 2。最后的卷积结果是3 * 3。
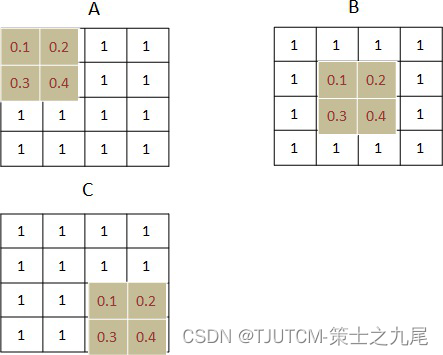
A. 第一步,卷积核与原始数据第一个数据做卷积乘法。图中示例部分的算法如下:
0.1 * 1+0.2 * 1+0.3 * 1+0.4 * 1=1.0。
B. 中间步骤,按顺序移动卷积核,并和目标区域做矩阵乘法。得到这一步的卷积值,作为结果矩阵的一个元素,图中示例部分的算法如下:
0.1 * 1+0.2 * 1+0.3 * 1+0.4 * 1=1.0
C. 最后一步,用卷积核卷积 input[2:4,2:4],最后共 4 个元素。图中示例部分的算法和上面一样,最后的值也是 1。
因为原始数据都是 1,所有最后卷积出来的结果才是相同的,否则的话是不同的。最终卷积的结果就是:
5.2 Conv1d
conv1d 是一维卷积,它和 conv2d 的区别在于只对宽度进行卷积,对高度不卷积。
5.2.1 函数定义
torch.nn.functional.conv1d(input, weight, bias=None, stride=1, padding=0, dilation=
5.2.2 参数说明
input:输入的Tensor数据,格式为 (batch,channels,W),三维数组,第一维度是样本数量,第二维度是通道数或者记录数,三维度是宽度。
weight:卷积核权重,也就是卷积核本身。是一个三维数组,(out_channels, in_channels/groups, kW)。 out_channels 是卷积核输出层的神经元个数,也就是这层有多少个卷积核;in_channels 是输入通道数;kW 是卷积核的宽度。
bias:位移参数,可选项,一般也不用管。
stride:滑动窗口,默认为 1,指每次卷积对原数据滑动 1 个单元格。
padding:是否对输入数据填充 0。Padding 可以将输入数据的区域改造成是卷积核大小的整数倍,这样对不满足卷积核大小的部分数据就不会忽略了。通过 padding 参数指定填充区域的高度和宽度,默认 0(就是填充区域为0,不填充的意思)。
ilation:卷积核之间的空格,默认 1。
groups:将输入数据分组,通常不用管这个参数,没有太大意义。
5.2.3 测试代码
import torch
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
print("conv1d sample")
a=range(16)
x = Variable(torch.Tensor(a))
x=x.view(1,1,16)
print("x variable:", x)
b=torch.ones(3)
b[0]=0.1
b[1]=0.2
b[2]=0.3
weights = Variable(b)
weights=weights.view(1,1,3)
print ("weights:",weights)
y=F.conv1d(x, weights, padding=0)
print ("y:",y)
5.2.4 最终结果
我们看看它是怎么计算的:
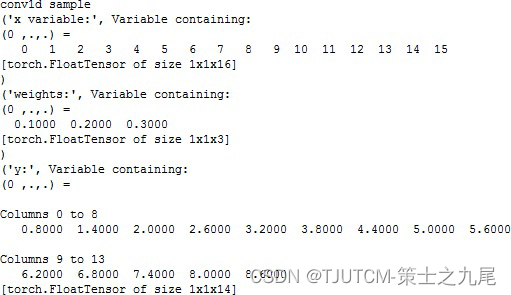
(1)原始数据大小是 0-15 的一共 16 个数字,卷积核宽度是 3,向量是 [0.1,0.2,0.3]。
我们看第一个卷积是对 x[0:3] 共 3 个值 [0,1,2] 进行卷积,公式如下:
0 * 0.1+1 * 0.2+2 * 0.3=0.8
(2)对第二个目标卷积,是 x[1:4] 共 3 个值 [1,2,3] 进行卷积,公式如下:
1 * 0.1+2 * 0.2+3 * 0.3=1.4
看到和计算结果完全一致!
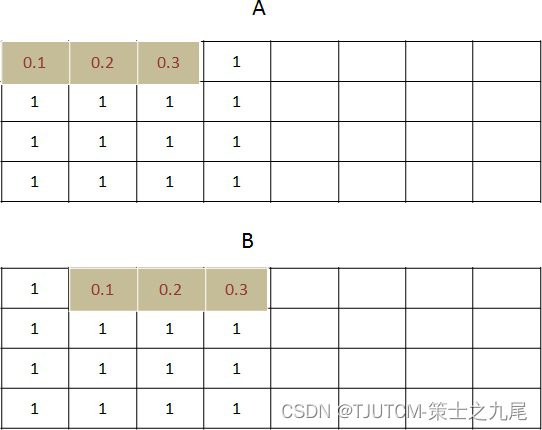
该图就是conv1d的示意图,和conv2d的区别就是只对宽度卷积,不对高度卷积。最后结果的宽度是原始数据的宽度减去卷积核的宽度再加上
1,这里就是 14。
所以最终卷积之后的结果一共是 14 个数值,显示如下:

我们再看看输入数据有多个通道的情况:
5.2.5 核心代码
print("conv1d sample")
a=range(16)
x = Variable(torch.Tensor(a))
x=x.view(1,2,8)
print("x variable:", x)
b=torch.ones(6)
b[0]=0.1
b[1]=0.2
b[2]=0.3
weights = Variable(b)
weights=weights.view(1,2,3)
print ("weights:",weights)
y=F.conv1d(x, weights, padding=0)
print ("y:",y)
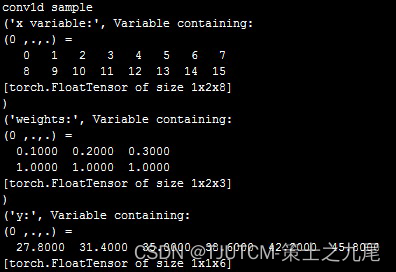
我们看看返回结果第一个元素 27.8 是怎么计算出来的,这时候卷积核有 2 个通道:
[0.1,0.2,0.3] 和 [1,1,1]
第 1 个卷积对象也有 2 个通道:[0,1,2] 和 [8,9,10]
结果是 2 个卷积核分别对应 2 个输入通道进行卷积然后求和。
卷积核对第 1 个卷积对象的卷积值:(0.1 * 0+0.2 * 1+0.3 * 2)+(1 * 8+1 * 9+1 * 10)=27.8
第2个卷积对象也有 2 个通道:[1,2,3] 和 [9,10,11]
卷积核对第 2 个卷积对象的卷积值:(0.1 * 1+0.2 * 2+0.3 * 3)+(1 * 9+1 * 10+1 * 11)=31.4,和 pytorch 计算结果相同。
六、池化层
池化层比较容易理解,就是将多个元素用一个统计值来表示。
那为什么要池化呢?
比如对于一个图像来说,单个的像素其实不代表什么含义。统计值可以取最大值,也可以取平均值,用不同的池化函数来表示。
6.1 max_pool2d
对于二维最大值池化来说,用 torch.nn.functional. F.max_pool2d 方法来操作。
比如:
import torch.nn.functional as F
from torch.autograd import Variable
print("conv2d sample")
a=range(20)
x = Variable(torch.Tensor(a))
x=x.view(1,1,4,5)
print("x variable:", x)
y=F.max_pool2d(x, kernel_size=2,stride=2)
print ("y:",y)
最后显示结果如下图:
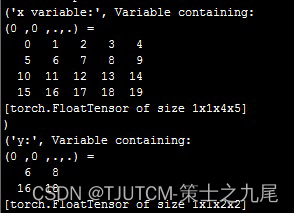
x 是 4*5 的矩阵,表示高度 4,宽度 5,一个样本,每个样本一个通道。
x=x.view(1,1,4,5) 意思是将 x 矩阵转换成 (1,1,4,5) 的四维矩阵,第一个 1 是样本数,第二个 1 是通道数,第三个 4 和第四个 5 是高度和宽度。
b=F.max_pool2d(x, kernel_size=2,stride=2) 中的参数 2 表示池化的核大小是 2,也就是 (2,2),表示核是一个行 2 列 2 的矩阵,每两行两列池化成一个数据。比如:
[[1,2],
[3,4]]
会被池化成最大的数,就是 4。
stride=2 表示滑动窗口为 2,第一个池化对象之后相隔 2 个元素距离,如果剩下的不够池化核的尺寸,则忽略掉不作池化处理。
第 1 个池化目标是 [[0,1],[5,6]],因此最大池化结果是 6;第 2 个池化目标是 [[2,3],[7,8]],因此最大池化结果是 8。
max_pool2d 方法的说明如下:
torch.nn.functional.max_pool2d(input, kernel_size, stride=None, padding=0, dilation=1
那么具体的各个参数的含义说明如下:
input:输入的 Tensor 数据,格式为 (channels,H,W),三维数组,第一维度是通道数或者记录数,二、三维度是高度和宽度。
kernel_size:池化区的大小,指定宽度和高度 (kh x kw),如果只有一个值则表示宽度和高度相同。
stride:滑动窗口,默认和 kernel_size 相同值,这样在池化的时候就不会重叠。如果设置的比 kernel_size 小,则池化时会重叠。它也是高度和宽度两个值。
padding:是否对输入在左前端填充 0。池化时,如果剩余的区域不够池化区大小,则会丢弃掉。 Padding 可以将输入数据的区域改造成是池化核的整数倍,这样就不会丢弃掉原始数据了。Padding 也是指定填充区域的高度和宽度,默认 0(就是填充区域为 0,不填充的意思)。
ceil_mode:在计算输出 shape 大小时按照 ceil 还有 floor 计算,是数序函数(如ceil(4.5)=5;floor(4.5)=4)。
count_include_pad:为 True 时,在求平均时会包含 0 填充区域的大小。这个参数只有在 avg_pool2d 并且 padding 参数不为 0 时才有意义。
6.2 avg_pool2d
那么同样的,avg_pool2d 和 max_pool2d 的计算原理是一样的!只不过avg_pool2d 取的是平均值,而不是最大值而已。这里就不重复说明计算过程了。
6.3 max_pool1d
max_pool1d 和 max_pool2d 的区别和卷积操作类似,也是只对宽度进行池化。
先看看示例代码:
print("conv1d sample")
a=range(16)
x = Variable(torch.Tensor(a))
x=x.view(1,1,16)
print("x variable:", x)
y=F.max_pool1d(x, kernel_size=2,stride=2)
print ("y:",y)
输出结果:
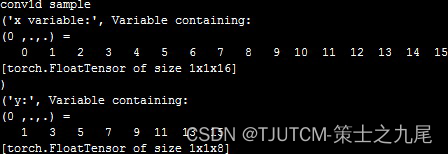
max_pool1d 方法对输入参数的最后一个维度进行最大池化。
第一个池化目标 [0,1],池化输出 1;
第二个池化目标 [2,3],池化输出 3;
……
最后结果就是这样计算得来的。
同样,我们仿照卷积操作再看看多通道的池化示例。代码:
print("conv1d sample")
a=range(16)
x = Variable(torch.Tensor(a))
x=x.view(1,2,8)
print("x variable:", x)
y=F.max_pool1d(x, kernel_size=2,stride=2)
print ("y:",y)
输出结果:
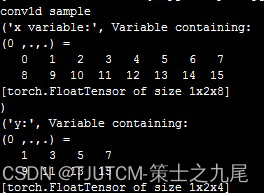
可以看到通道数保持不变。
七、后记
好的,恭喜你看完了本文的全部内容!其余的知识点,会在基于PyTorch的深度学习实战的下篇和补充篇分享,会在下周放出!如果有兴趣跟着我学习的话,请在这周复习回顾并尽量手敲代码来体验并加深理解。下周见!



![力扣奇遇记 [第一章]](https://img-blog.csdnimg.cn/fc6ad78ef64d4022bfb6cbce17c14b09.png)