0.摘要
虽然卷积神经网络(CNN)在计算机视觉领域取得了巨大成功,但本研究探讨了一种更简单、无卷积的骨干网络,适用于许多密集预测任务。与最近提出的专门用于图像分类的Vision Transformer(ViT)不同,我们引入了金字塔视觉Transformer(PVT),克服了将Transformer应用于各种密集预测任务的困难。与当前最先进的方法相比,PVT具有几个优点:
(1)与通常输出低分辨率结果且计算和内存开销较高的ViT不同,PVT不仅可以在图像的密集分区上进行训练,以实现高输出分辨率,这对于密集预测非常重要,而且还使用逐渐缩小的金字塔来减少大型特征图的计算量。
(2)PVT继承了CNN和Transformer的优点,使其成为各种视觉任务的统一骨干,无需卷积,可以直接替代CNN的骨干网络。
(3)通过大量实验证明了PVT的有效性,它提升了许多下游任务的性能,包括物体检测、实例分割和语义分割。例如,在参数数量相当的情况下,PVT+RetinaNet在COCO数据集上达到了40.4的AP,超过了ResNet50+RetinaNet(36.3 AP)4.1个AP(见图2)。
我们希望PVT能够成为像素级预测的替代和有用的骨干网络,并促进未来的研究。
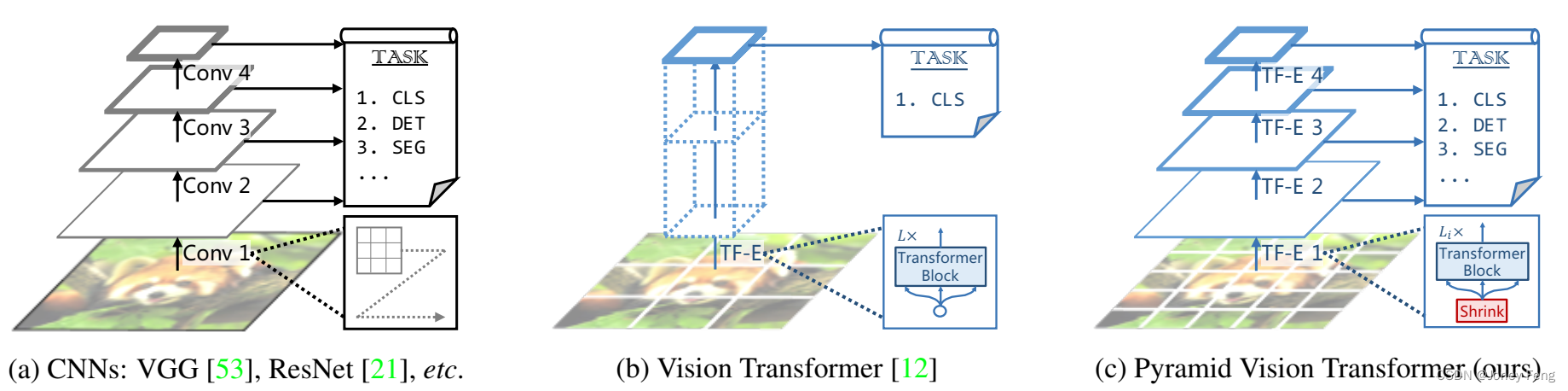
图1:不同架构的比较,其中“Conv”和“TF-E”分别代表“卷积”和“Transformer编码器”。
(a)许多CNN主干网络在目标检测(DET)、实例分割和语义分割(SEG)等密集预测任务中使用金字塔结构。
(b)最近提出的Vision Transformer(ViT)[12]是一种专为图像分类(CLS)而设计的“柱状”结构。 (c)通过将CNN的金字塔结构结合起来,我们提出了金字塔视觉Transformer(PVT),它可以用作许多计算机视觉任务的多功能主干网络,扩大了ViT的范围和影响。
此外,我们的实验还表明,PVT可以轻松与DETR [5]相结合,构建一个无需卷积的端到端目标检测系统。
1.引言
卷积神经网络(CNN)在计算机视觉领域取得了显著的成功,使其成为几乎所有任务的通用和主导方法[53,21,72,48,20,38,8,31]。然而,本研究旨在探索一种超越CNN的替代骨干网络,用于密集预测任务,如物体检测[39,13]、语义分割[81]和实例分割[39],除了图像分类[11]之外。
受到Transformer在自然语言处理中的成功启发,许多研究人员开始探索其在计算机视觉中的应用。例如,一些工作将视觉任务建模为具有可学习查询的字典查找问题,并在CNN骨干网络之上使用Transformer解码器作为任务特定的头部[5,82,71,55,23,41]。虽然一些先前的研究也将注意力模块[69,47,78]融入到CNN中,但据我们所知,在计算机视觉中探索一个干净且无卷积的Transformer骨干网络来解决密集预测任务的研究非常有限。
最近,Dosovitskiy等人[12]提出了用于图像分类的Vision Transformer(ViT)。这是一种有趣且有意义的尝试,以无卷积模型取代CNN的骨干网络。如图1(b)所示,ViT具有柱状结构,以粗糙的图像块作为输入。虽然ViT适用于图像分类,但直接将其适应于像素级密集预测,如物体检测和分割,是具有挑战性的,因为
(1)其输出特征图是单尺度和低分辨率的,
(2)即使对于常见的输入图像尺寸(例如COCO基准测试中800像素的短边),其计算和内存成本也相对较高。
为了解决上述限制,本研究提出了一种纯Transformer骨干网络,称为金字塔视觉Transformer(PVT),可以在许多下游任务中替代CNN骨干网络,包括图像级预测和像素级密集预测。具体而言,如图1(c)所示,我们的PVT通过以下方式克服了传统Transformer的困难:
(1)采用细粒度的图像块(即每个块4×4像素)作为输入,学习高分辨率的表示,这对于密集预测任务至关重要;
(2)引入渐进缩小的金字塔结构,随着网络的加深,减少Transformer的序列长度,显著降低计算成本;
(3)采用空间缩减注意力(SRA)层,在学习高分辨率特征时进一步减少资源消耗。
总体而言,提出的PVT具有以下优点。
首先,与传统的CNN骨干网络(参见图1(a))相比,其具有随着网络深度增加而增大的局部感受野,我们的PVT始终产生全局感受野,更适用于检测和分割任务。
其次,与ViT(参见图1(b))相比,由于其先进的金字塔结构,我们的方法可以更容易地嵌入到许多代表性的密集预测流程中,例如RetinaNet [38]和Mask R-CNN [20]。
第三,我们可以通过将PVT与其他任务特定的Transformer解码器(例如PVT+DETR [5]用于目标检测)结合,构建一个无卷积的流程。据我们所知,这是第一个完全无卷积的目标检测流程。
我们的主要贡献如下:
(1) 我们提出了金字塔视觉Transformer(PVT),这是第一个专为各种像素级密集预测任务设计的纯Transformer骨干网络。通过结合PVT和DETR,我们可以构建一个端到端的目标检测系统,无需卷积和手工设计的组件,如密集锚点和非极大值抑制(NMS)。
【DETR(Detection Transformer)是一种基于Transformer的端到端目标检测模型。它使用Transformer编码器来处理输入图像,并通过自注意力机制来建立图像中目标的全局关联。DETR的输出由两部分组成:目标类别和目标框坐标。】
(2) 我们通过设计渐进缩小的金字塔和空间缩减注意力(SRA),克服了将Transformer迁移到密集预测任务时的许多困难。这些方法能够减少Transformer的资源消耗,使PVT能够灵活地学习多尺度和高分辨率的特征。
(3) 我们在几个不同的任务上对提出的PVT进行了评估,包括图像分类、目标检测、实例分割和语义分割,并将其与流行的ResNet [21]和ResNeXt [72]进行了比较。
如图2所示,我们的PVT在不同参数规模下相对于先前的方法始终取得了改进的性能。例如,在可比的参数数量下,使用RetinaNet [38]进行目标检测,PVT-Small在COCO val2017上实现了40.4的AP,比ResNet50高出4.1个点(40.4 vs. 36.3)。此外,PVT-Large实现了42.6的AP,比ResNeXt101-64x4d提高了1.6个点,参数数量减少了30%。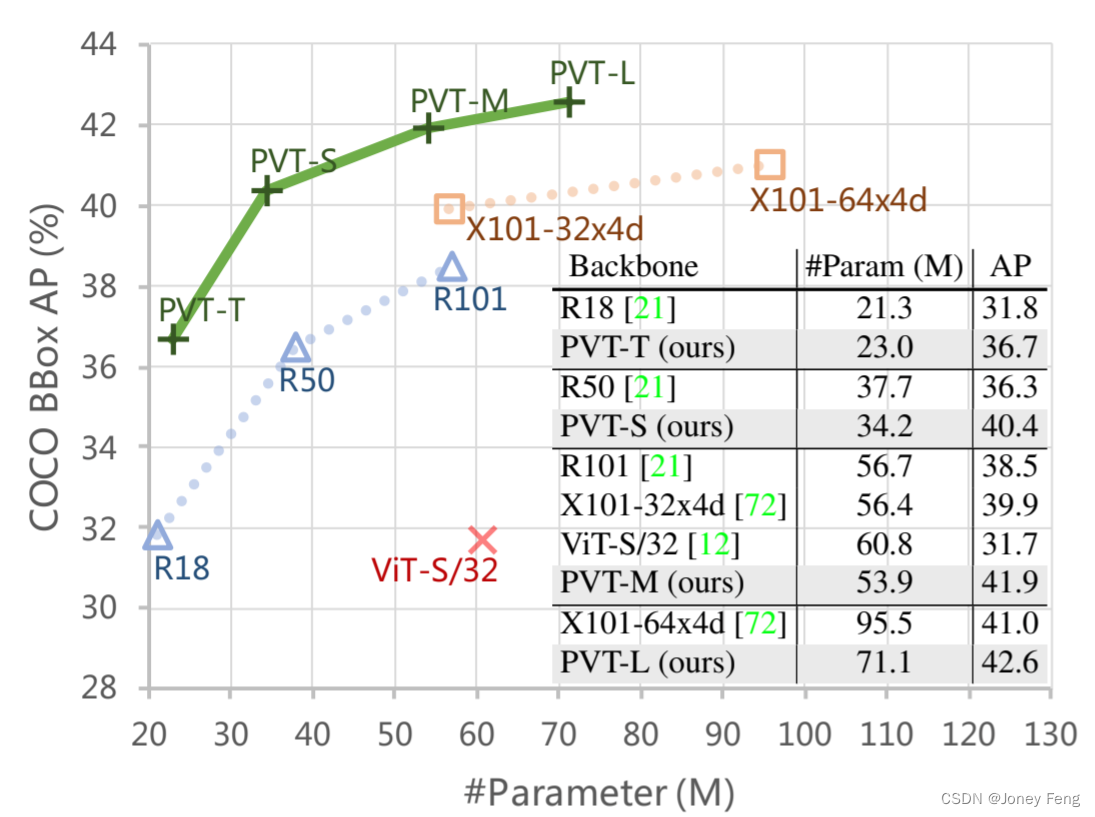
图2:使用RetinaNet进行目标检测时,在COCO val2017上不同骨干网络的性能比较,其中“T”、“S”、“M”和“L”表示我们的PVT模型的不同规模。我们可以看到,当不同模型的参数数量可比时,PVT变体显著优于它们对应的骨干网络,如ResNets(R)[21],ResNeXts(X)[72]和ViT [12]。
2.相关工作
2.1.CNN主干网络
CNN是视觉识别中深度神经网络的主力军。标准的CNN最早在[33]中被引入,用于区分手写数字。该模型包含具有一定感受野的卷积核,可以捕捉有利的视觉上下文。为了提供平移等变性,卷积核的权重在整个图像空间上共享。近年来,随着计算资源(例如GPU)的快速发展,对大规模图像分类数据集(例如ImageNet [50])上的堆叠卷积块[32,53]的成功训练成为可能。例如,GoogLeNet [58]证明了包含多个卷积核路径的卷积操作符可以实现非常竞争的性能。多路径卷积块的有效性在Inception系列[59,57]、ResNeXt [72]、DPN [9]、MixNet [64]和SKNet [35]中进一步得到验证。此外,ResNet [21]将跳跃连接引入卷积块中,使得创建/训练非常深的网络成为可能,并在计算机视觉领域取得了令人印象深刻的结果。DenseNet [24]引入了一种密集连接的拓扑结构,将每个卷积块连接到所有先前的块。最近的进展可以在最近的调研/综述论文[30,52]中找到。与完整的CNN不同,视觉Transformer骨干网络仍处于早期开发阶段。在这项工作中,我们尝试通过设计一种新的多功能Transformer骨干网络,适用于大多数视觉任务,来扩展Vision Transformer的范围。
2.2.密集预测任务
初步的。密集预测任务旨在对特征图进行像素级分类或回归。目标检测和语义分割是两个典型的密集预测任务。
目标检测。在深度学习时代,CNN已成为目标检测的主要框架,其中包括单阶段检测器(如SSD [42]、RetinaNet [38]、FCOS [61]、GFL [36,34]、PolarMask [70]和OneNet [54])和多阶段检测器(Faster R-CNN [48]、Mask R-CNN [20]、Cascade R-CNN [4]和Sparse R-CNN [56])。这些主流目标检测器大多都建立在高分辨率或多尺度的特征图上,以获得良好的检测性能。最近,DETR [5]和可变形DETR [82]将CNN骨干和Transformer解码器结合起来构建一个端到端的目标检测器。同样地,它们也需要高分辨率或多尺度的特征图来进行准确的目标检测。
语义分割。CNN在语义分割中也起着重要的作用。在早期阶段,FCN [43]引入了完全卷积的架构,用于为任意大小的给定图像生成空间分割图。随后,Noh等人 [46]引入了反卷积操作,并在PASCAL VOC 2012数据集 [51]上取得了令人印象深刻的性能。受到FCN的启发,U-Net [49]专门用于医学图像分割领域,将相同空间尺寸的低级和高级特征图之间的信息流连接起来。为了探索更丰富的全局上下文表示,Zhao等人 [79]设计了一个金字塔池化模块,用于不同的池化尺度,而Kirillov等人 [31]则基于FPN [37]开发了一个轻量级的分割头部模块,称为Semantic FPN。最后,DeepLab系列 [7,40]应用了空洞卷积来扩大感受野,同时保持特征图的分辨率。与目标检测方法类似,语义分割模型也依赖于高分辨率或多尺度的特征图。
2.3.自注意力机制和Transformer在视觉中的应用
由于卷积滤波器权重通常在训练后固定,它们无法根据不同的输入进行动态调整。许多方法已经提出来通过使用动态滤波器 [29]或自注意操作 [63]来缓解这个问题。非局部块 [69]尝试对空间和时间上的长程依赖进行建模,对于准确的视频分类已经被证明是有益的。然而,尽管非局部操作符取得了成功,但它面临着高计算和内存成本的问题。Criss-cross [25]通过生成交叉路径的稀疏注意力图进一步降低了复杂性。Ramachandran等人 [47]提出了独立的自注意力来替换卷积层,使用本地自注意单元。AANet [3]在自注意力和卷积操作结合时取得了有竞争力的结果。LambdaNetworks [2]使用lambda层,一种高效的自注意力方法,来替换CNN中的卷积操作。DETR [5]利用Transformer解码器将目标检测建模为一个端到端的字典查找问题,通过可学习的查询成功地消除了诸如NMS之类的手工制作过程。在DETR的基础上,可变形DETR [82]进一步采用了可变形注意力层,以关注一组稀疏的上下文元素,从而实现更快的收敛和更好的性能。最近,Vision Transformer (ViT) [12]通过将图像视为一系列补丁,采用纯Transformer [63]模型进行图像分类。DeiT [62]通过一种新颖的蒸馏方法进一步扩展了ViT。与以前的模型不同,本工作将金字塔结构引入Transformer,用于呈现密集预测任务的纯Transformer骨干,而不是任务特定的头部或图像分类模型。
3.金字塔视觉Transformer
3.1.整体架构
我们的目标是将金字塔结构引入Transformer框架,使其能够为密集预测任务(例如目标检测和语义分割)生成多尺度的特征图。PVT的概述如图3所示。与CNN的骨干网络[21]类似,我们的方法有四个阶段,生成不同尺度的特征图。所有阶段共享相似的架构,包括一个补丁嵌入层和Li个Transformer编码器层。
在第一阶段中,给定大小为H×W×3的输入图像,我们首先将其划分为HW/4×HW/4个大小为4×4×3的补丁。然后,我们将展平的补丁输入线性投影,并获得大小为HW/4×C1的嵌入补丁。接下来,将嵌入补丁和位置嵌入一起通过具有L1个层的Transformer编码器,输出被重塑为大小为H/4×W/4×C1的特征图F1。以相同的方式,使用前一阶段的特征图作为输入,我们获得以下特征图F2、F3和F4,它们相对于输入图像的步长分别为8、16和32个像素。通过特征金字塔{F1,F2,F3,F4},我们的方法可以轻松地应用于大多数下游任务,包括图像分类、目标检测和语义分割。

图3:金字塔视觉Transformer(PVT)的整体架构。整个模型分为四个阶段,每个阶段由一个补丁嵌入层和一个Li层的Transformer编码器组成。按照金字塔结构,四个阶段的输出分辨率逐渐从高(4倍步长)缩小到低(32倍步长)。
3.2.Transformer的特征金字塔
与CNN骨干网络[53,21]使用不同的卷积步长来获得多尺度特征图不同,我们的PVT通过补丁嵌入层使用逐渐缩小的策略来控制特征图的尺度。在这里,我们将第i个阶段的补丁大小表示为Pi。在第i个阶段的开始,我们首先将输入特征图Fi−1 ∈RHi−1×Wi−1×Ci−1均匀地划分为Hi−PiWi−Pi个补丁,然后将每个补丁展平并投影到一个Ci维的嵌入中。经过线性投影后,嵌入补丁的形状可以看作是HPi×WPi×Ci,其中高度和宽度比输入小Pi倍。通过这种方式,我们可以在每个阶段灵活调整特征图的尺度,从而可以构建Transformer的特征金字塔。
图4:多头注意力(MHA)与空间缩减注意力(SRA)的比较。通过空间缩减操作,我们的SRA的计算/内存成本远低于MHA。
3.3.Transformer编码
第i阶段中的Transformer编码器有Li个编码器层,每个编码器层由一个注意力层和一个前馈层组成[63]。由于PVT需要处理高分辨率(例如4倍步长)的特征图,我们提出了一种空间缩减注意力(SRA)层来替代编码器中传统的多头注意力(MHA)层[63]。
与MHA类似,我们的SRA接收查询Q、键K和值V作为输入,并输出一个经过改进的特征。不同之处在于我们的SRA在注意力操作之前减小了K和V的空间尺度(参见图4),这大大减小了计算和内存开销。第i阶段中SRA的详细描述如下:
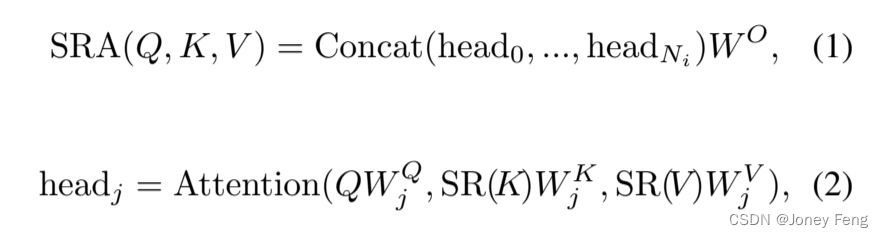 其中Concat(·)是连接操作,与[63]中一样。W Q j,W K j和W V j是线性投影参数,维度分别为RCi×dhead。W O 是一个 RCi×Ci 的线性投影参数。Ni是第i阶段注意力层的头数。因此,每个头的维度(即dhead)等于NCii。SR(·)是用于减小输入序列(即K或V)的空间维度的操作,表示为:
其中Concat(·)是连接操作,与[63]中一样。W Q j,W K j和W V j是线性投影参数,维度分别为RCi×dhead。W O 是一个 RCi×Ci 的线性投影参数。Ni是第i阶段注意力层的头数。因此,每个头的维度(即dhead)等于NCii。SR(·)是用于减小输入序列(即K或V)的空间维度的操作,表示为: 这里,x ∈ R(HiWi)×Ci表示输入序列,Ri表示第i阶段注意力层的缩减比例。Reshape(x,Ri)是将输入序列x重新形状为大小为HRiW2 i i i ×(Ri2Ci)的序列的操作。WS ∈ R(Ri2Ci)×Ci是一个线性投影,将输入序列的维度降低到Ci。Norm(·)表示层归一化[1]。与原始的Transformer [63]一样,我们的注意力操作Attention(·)计算如下:
这里,x ∈ R(HiWi)×Ci表示输入序列,Ri表示第i阶段注意力层的缩减比例。Reshape(x,Ri)是将输入序列x重新形状为大小为HRiW2 i i i ×(Ri2Ci)的序列的操作。WS ∈ R(Ri2Ci)×Ci是一个线性投影,将输入序列的维度降低到Ci。Norm(·)表示层归一化[1]。与原始的Transformer [63]一样,我们的注意力操作Attention(·)计算如下: 通过这些公式,我们可以发现我们的注意力操作的计算/内存成本比MHA低Ri2倍,因此我们的SRA可以在有限资源下处理更大的输入特征图/序列。
通过这些公式,我们可以发现我们的注意力操作的计算/内存成本比MHA低Ri2倍,因此我们的SRA可以在有限资源下处理更大的输入特征图/序列。
3.4.讨论
与我们的模型最相关的工作是ViT [12]。在这里,我们讨论它们之间的关系和区别。首先,PVT和ViT都是没有卷积的纯Transformer模型。它们之间的主要区别在于金字塔结构。与传统的Transformer [63]类似,ViT的输出序列的长度与输入相同,这意味着ViT的输出是单一尺度的(参见图1 (b))。此外,由于资源有限,ViT的输入是粗粒度的(例如,补丁大小为16或32像素),因此其输出分辨率相对较低(例如,16步长或32步长)。因此,直接将ViT应用于需要高分辨率或多尺度特征图的密集预测任务是困难的。
我们的PVT通过引入逐步缩小的金字塔结构打破了Transformer的常规。它可以生成与传统CNN骨干网络类似的多尺度特征图。此外,我们还设计了一个简单但有效的注意力层——SRA,用于处理高分辨率特征图并减少计算和内存成本。由于以上设计的优势,我们的方法相比ViT具有以下优点:
1)更灵活——可以在不同阶段生成不同尺度/通道的特征图;
2)更通用——可以轻松地插入并在大多数下游任务模型中使用;
3)更友好于计算和内存——可以处理更高分辨率的特征图或更长的序列。
4.应用到下游任务
4.1.基于图像级别的预测
图像分类是图像级别预测最经典的任务。为了提供讨论的实例,我们设计了一系列不同尺度的PVT模型,分别是PVT-Tiny、-Small、-Medium和-Large,其参数数量与ResNet18、50、101和152相似。PVT系列的详细超参数设置在补充材料中提供。对于图像分类,我们遵循ViT [12]和DeiT [62]的做法,在最后一个阶段的输入中添加一个可学习的分类标记,然后使用全连接(FC)层在标记之上进行分类。
4.2.基于像素级别的密集预测
除了图像级别的预测,密集预测也经常在下游任务中出现,需要在特征图上进行像素级别的分类或回归。在这里,我们讨论两个典型的任务,分别是目标检测和语义分割。我们将我们的PVT模型应用于三种代表性的密集预测方法,分别是RetinaNet [38]、Mask R-CNN [20]和Semantic FPN [31]。RetinaNet是一种广泛使用的单阶段检测器,Mask R-CNN是最流行的两阶段实例分割框架,Semantic FPN是一种没有特殊操作(例如,空洞卷积)的基本语义分割方法。使用这些方法作为基准可以充分检验不同的骨干网络的有效性。
具体的实现细节如下:
(1)与ResNet类似,我们使用在ImageNet上预训练的权重来初始化PVT骨干网络;
(2)我们使用输出特征金字塔{F1,F2,F3,F4}作为FPN [37]的输入,然后将精炼的特征图送入后续的检测/分割头部;
(3)在训练检测/分割模型时,PVT的所有层都不被冻结;
(4)由于检测/分割的输入可以是任意形状,预训练的ImageNet上的位置嵌入可能不再有意义。因此,我们根据输入分辨率对预训练的位置嵌入进行双线性插值。
5.实验
我们将PVT与两个最具代表性的CNN骨干网络进行比较,即ResNet [21]和ResNeXt [72],它们在许多下游任务的基准测试中被广泛使用。
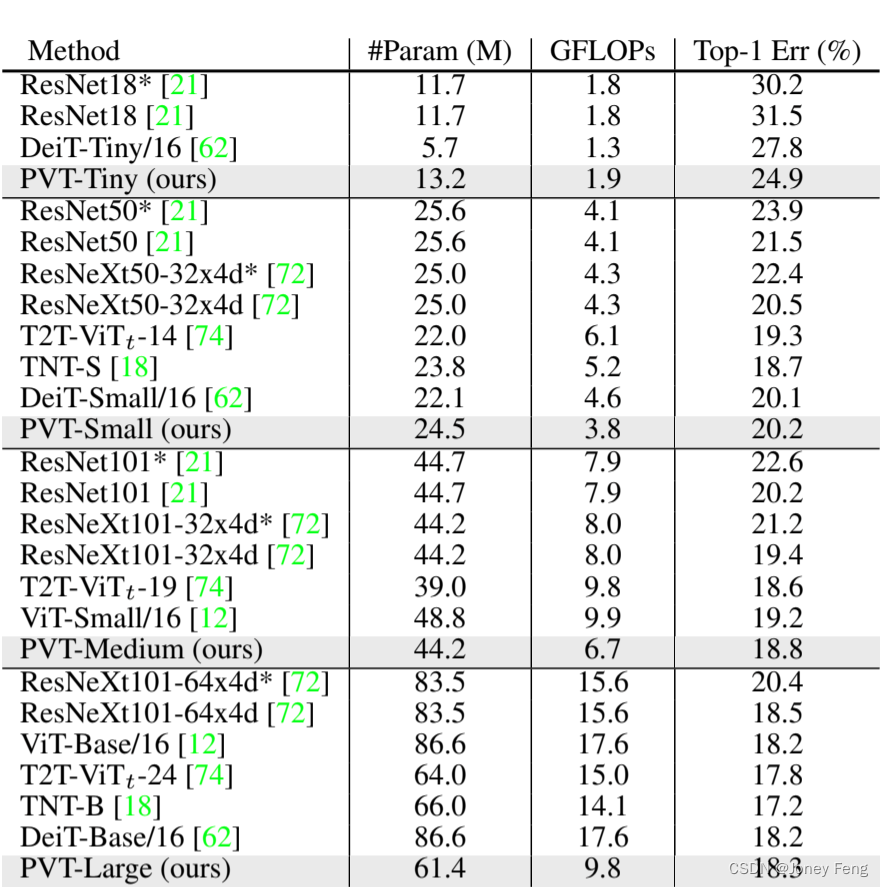
表1:在ImageNet验证集上的图像分类性能。“#Param”指参数数量。“GFLOPs”是在输入尺度为224×224下计算的。“*”表示使用原始论文中的训练策略的方法的性能。
5.1.图像分类
设置。图像分类实验是在ImageNet 2012数据集[50]上进行的,该数据集包含了128万张训练图像和1,000个类别的50,000张验证图像。为了进行公平比较,所有模型都在训练集上进行训练,并在验证集上报告top-1错误率。我们遵循DeiT [62]的做法,采用随机裁剪、随机水平翻转[58]、标签平滑正则化[59]、mixup [76]、CutMix [75]和随机擦除[80]作为数据增强。在训练过程中,我们使用AdamW [45]进行优化,动量为0.9,小批量大小为128,权重衰减为5×10^-2。初始学习率设置为1×10^-3,并按照余弦调度[44]进行衰减。所有模型在8个V100 GPU上从头开始训练300个epochs。为了进行基准测试,我们对验证集进行中心裁剪,将224×224的图像块裁剪出来评估分类准确率。
结果。在表1中,我们可以看到在相似的参数数量和计算预算下,我们的PVT模型优于传统的CNN骨干网络。例如,当GFLOPs大致相似时,PVT Small的top-1错误率达到20.2,比ResNet50 [21]的错误率高1.3个百分点(20.2 vs. 21.5)。同时,在相似或更低的复杂度下,PVT模型的性能与最近提出的基于Transformer的模型(如ViT [12]和DeiT [62])相当(PVT-Large: 18.3 vs. ViT(DeiT)-Base/16: 18.3)。在此,我们需要澄清的是,这些结果符合我们的预期,因为金字塔结构对于密集预测任务是有益的,但对图像分类几乎没有改进。需要注意的是,ViT和DeiT有局限性,它们专门设计用于分类任务,因此不适用于密集预测任务,后者通常需要有效的特征金字塔。
5.2.目标检测
设置。目标检测实验是在具有挑战性的COCO基准测试[39]上进行的。所有模型都在COCO train2017(118,000张图像)上进行训练,并在val2017(5,000张图像)上进行评估。我们在两个标准检测器RetinaNet [38]和Mask R-CNN [20]的基础上验证了PVT骨干网络的有效性。在训练之前,我们使用在ImageNet上预训练的权重来初始化骨干网络,并使用Xavier [17]来初始化新增的层。我们的模型在8个V100 GPU上以批量大小为16进行训练,并使用AdamW [45]进行优化,初始学习率为1×10^-4。遵循常规做法[38,20,6],我们采用1×或3×的训练计划(即12或36个epochs)来训练所有的检测模型。训练图像的尺寸调整为较短边为800像素,而较长边不超过1333像素。当使用3×的训练计划时,我们会在[640,800]的范围内随机调整输入图像的较短边。在测试阶段,输入图像的较短边固定为800像素。
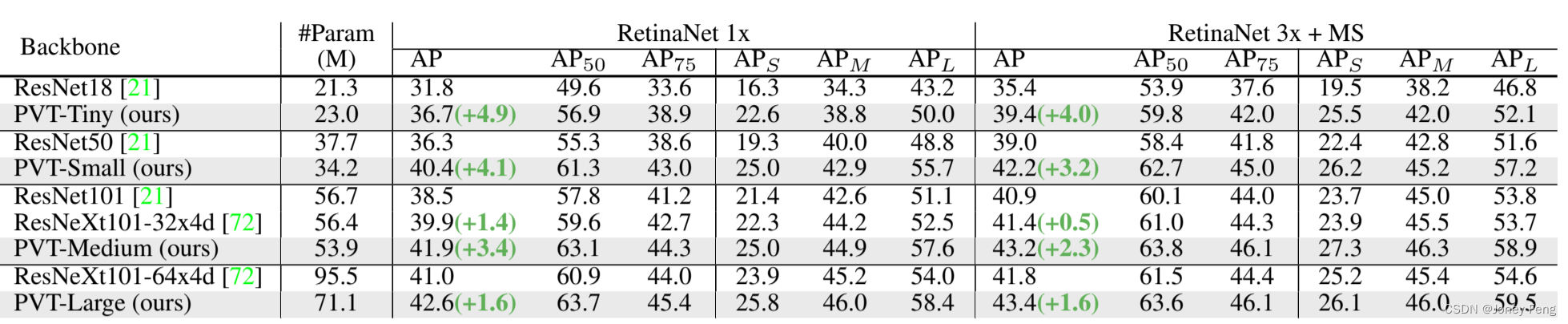
结果。如表2所示,在使用RetinaNet进行目标检测时,我们发现在相同数量的参数下,基于PVT的模型显著超过了它们的对应模型。例如,使用1×的训练计划,PVT-Tiny的AP比ResNet18高出4.9个百分点(36.7 vs. 31.8)。此外,使用3×的训练计划和多尺度训练,PVT-Large实现了最佳的AP为43.4,超过了ResNeXt101-64x4d(43.4 vs. 41.8),而我们的参数数量少了30%。这些结果表明,对于目标检测,我们的PVT可以作为CNN骨干网络的良好替代品。在基于Mask R-CNN的实例分割实验中也发现了类似的结果,如表3所示。使用1×的训练计划,PVT-Tiny实现了35.1的掩膜AP(APm),比ResNet18高出3.9个百分点(35.1 vs. 31.2),甚至比ResNet50高出0.7个百分点(35.1 vs. 34.4)。PVT-Large获得的最佳APm为40.7,比ResNeXt101-64x4d高出1.0个百分点(40.7 vs. 39.7),且参数少了20%。
表2:在COCO val2017上的目标检测性能。“MS”表示使用了多尺度训练[38,20]。
5.3.语义分割
设置。我们选择了ADE20K [81]作为具有挑战性的场景解析数据集,来评估语义分割的性能。ADE20K包含150个细粒度的语义类别,分别用于训练、验证和测试的图像数量分别为20,210、2,000和3,352。我们基于没有膨胀卷积 [73]的简单分割方法Semantic FPN [31]来评估我们的PVT骨干网络。在训练阶段,骨干网络使用在ImageNet [11]上预训练的权重进行初始化,其他新增的层使用Xavier [17]进行初始化。我们使用AdamW [45]进行模型优化,初始学习率为1e-4。遵循常规做法[31,7],我们在4个V100 GPU上以批量大小为16进行80k次迭代的训练。学习率按照0.9的幂指数进行多项式衰减。在训练时,我们随机调整和裁剪图像大小为512×512,并在测试时按照较短边为512像素进行缩放。
结果。如表4所示,在使用Semantic FPN [31]进行语义分割时,基于PVT的模型始终优于基于ResNet [21]或ResNeXt [72]的模型。例如,几乎具有相同数量的参数和GFLOPs,我们的PVT-Tiny/Small/Medium的mIoU至少比ResNet-18/50/101高2.8个百分点。此外,尽管我们的PVT-Large的参数数量和GFLOPs比ResNeXt101-64x4d低了20%,但mIoU仍然比后者高出1.9个百分点(42.1 vs. 40.2)。在更长的训练计划和多尺度测试下,PVT-Large+Semantic FPN实现了最佳的mIoU为44.8,非常接近ADE20K基准测试的最新性能。需要注意的是,Semantic FPN只是一个简单的分割头部。这些结果表明,我们的PVT骨干网络可以比CNN骨干网络提取更好的用于语义分割的特征,得益于全局注意机制。
表3:在COCO val2017上的目标检测和实例分割性能。APb和APm分别表示边界框AP和掩膜AP。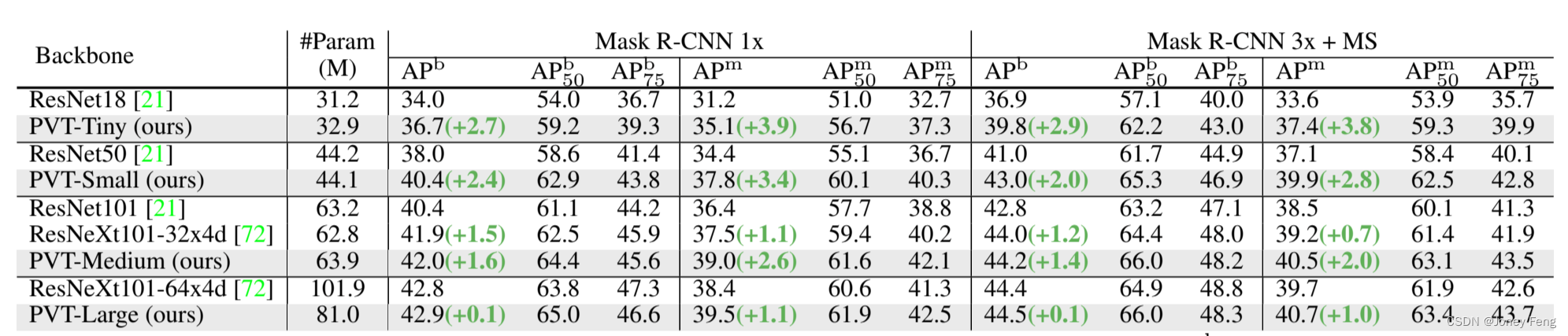
5.4.纯Transformer物体检测
为了达到无卷积的极限,我们通过简单地将我们的PVT与基于Transformer的检测头DETR [5]相结合,构建了一个纯Transformer的目标检测管道。我们在COCO train2017上训练模型50个epochs,初始学习率为1×10^(-4)。学习率在第33个epoch时除以10。我们使用随机翻转和多尺度训练作为数据增强。所有其他实验设置与5.2节中相同。如表5所示,基于PVT的DETR在COCO val2017上实现了34.7的AP,优于基于ResNet50的原始DETR 2.4个百分点(34.7 vs. 32.3)。这些结果证明了纯Transformer检测器在目标检测任务中也能很好地工作。在SM中,我们还尝试了一个纯Transformer模型PVT+Trans2Seg [71]用于语义分割。
表5:纯Transformer目标检测管道的性能。我们通过将PVT和DETR [5]相结合构建了一个纯Transformer检测器,其AP比基于ResNet50 [21]的原始DETR高出2.4个百分点。

5.5.消融研究
设置。我们在ImageNet [11]和COCO [39]数据集上进行消融研究。在ImageNet上的实验设置与第5.1节中的设置相同。对于COCO,所有模型都使用1×训练计划(即12个epochs)进行训练,不使用多尺度训练,其他设置与第5.2节中的设置相同。
金字塔结构。在将Transformer应用于密集预测任务时,金字塔结构至关重要。ViT(见图1(b))是一个柱状框架,其输出是单尺度的。当使用粗糙的图像补丁(例如,每个补丁32×32像素)作为输入时,会导致低分辨率的输出特征图,从而导致检测性能较差(如表6所示,在COCO val2017上为31.7的AP)。当像我们的PVT那样使用细粒度的图像补丁(例如每个补丁4×4像素)作为输入时,ViT将耗尽GPU内存(32G)。通过渐进式缩小的金字塔,我们的方法避免了这个问题。具体来说,我们的模型可以在浅层阶段处理高分辨率的特征图,在深层阶段处理低分辨率的特征图。因此,在COCO val2017上我们获得了40.4的AP,比ViT-Small/32高出8.7个百分点(40.4 vs. 31.7)。
计算开销。随着输入规模的增加,我们的PVT的GFLOPs增长速度大于ResNet [21],但低于ViT [12],如图5所示。然而,当输入规模不超过640×640像素时,PVT-Small和ResNet50的GFLOPs相似。这意味着我们的PVT更适用于中分辨率输入的任务。
在COCO数据集上,输入图像的较短边为800像素。在这种情况下,基于PVT-Small的RetinaNet的推理速度比基于ResNet50的模型慢。
(1)解决这个问题的一种直接方法是减小输入规模。将输入图像的较短边缩小到640像素时,基于PVT-Small的模型比基于ResNet50的模型运行更快(51.7ms vs. 55.9ms),并且AP更高(38.7 vs. 36.3,提高了2.4个百分点)。
(2)另一种解决方案是开发一个计算复杂度较低的自注意力层。这是一个值得探索的方向,我们最近提出了一种解决方案PVTv2 [66]。在SM中,我们对PVT的其他特征进行了更多的定性或定量分析,并提供了密集预测任务的视觉结果。
表6:使用RetinaNet进行目标检测时,ViT和我们的PVT的性能比较。由于小的补丁大小(即每个补丁4×4),ViT-Small/4的GPU内存不足。ViT-Small/32在COCO val2017上获得31.7的AP,比我们的PVT-Small低了8.7个百分点。

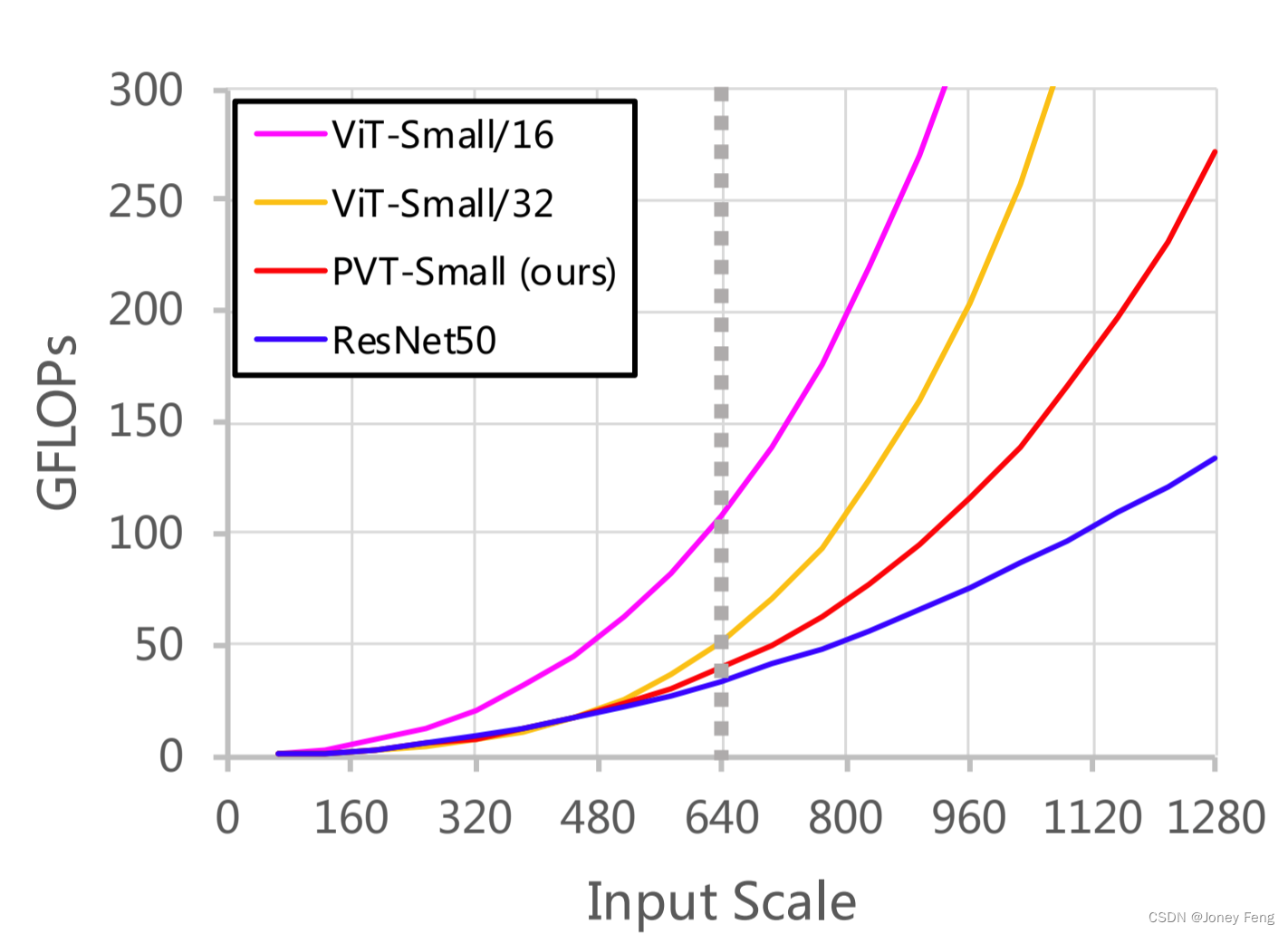
图5:不同输入规模下的模型GFLOPs。GFLOPs的增长速率为:ViT-Small/16 [12] > ViT-Small/32 [12] > PVT-Small(我们的)> ResNet50 [21]。
6.结论和未来的工作
我们引入了PVT,一种纯Transformer骨干网络,用于密集预测任务,如目标检测和语义分割。我们开发了一个逐渐缩小的金字塔和一个空间缩减注意力层,以在有限的计算/内存资源下获得高分辨率和多尺度的特征图。在目标检测和语义分割基准测试上进行了广泛的实验,验证了我们的PVT在相同参数数量下比精心设计的CNN骨干网络更强大。
尽管PVT可以作为CNN骨干网络(如ResNet、ResNeXt)的替代品,但仍然有一些特定的模块和操作是为CNN设计的,在这项工作中没有考虑,例如SE [22]、SK [35]、空洞卷积 [73]、模型修剪 [19] 和NAS [60]。此外,随着多年的快速发展,已经出现了许多经过良好设计的CNN骨干网络,如Res2Net [16]、EfficientNet [60]和ResNeSt [77]。相比之下,计算机视觉中基于Transformer的模型仍处于早期阶段的发展。因此,我们相信在未来还有许多潜在的技术和应用领域(例如OCR [67,65,68]、3D [27,10,26]和医学 [14,15,28]图像分析)有待探索,并希望PVT能够成为一个良好的起点。


![数据结构07:查找[C++][B树Btree]](https://img-blog.csdnimg.cn/5e97b730d4854a36bfcc169a8957be92.png)


![[数据结构]顺序表和ArrayList](https://img-blog.csdnimg.cn/img_convert/da77b64f02e8f83a800f70616299209f.png)