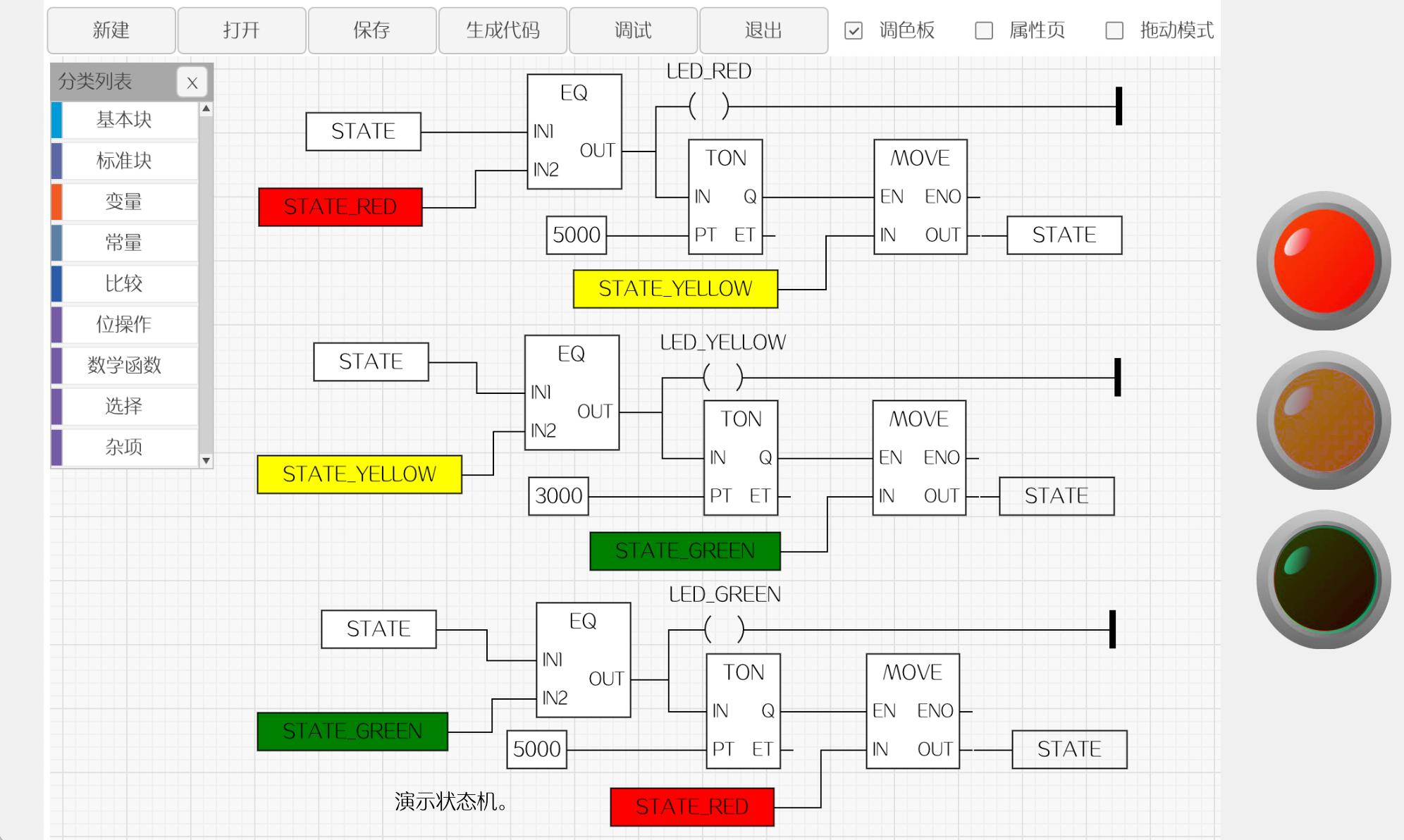
各种类型的数据传输和存储就涉及到大小端的问题,首先要简单说下芯片的大小端问题,我们这里主要讨论Cortex-M内核。
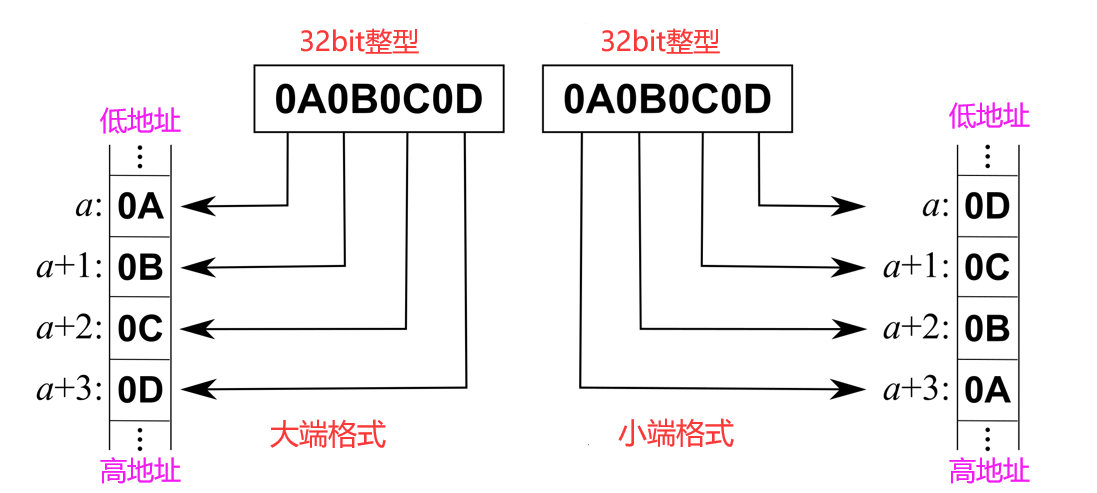
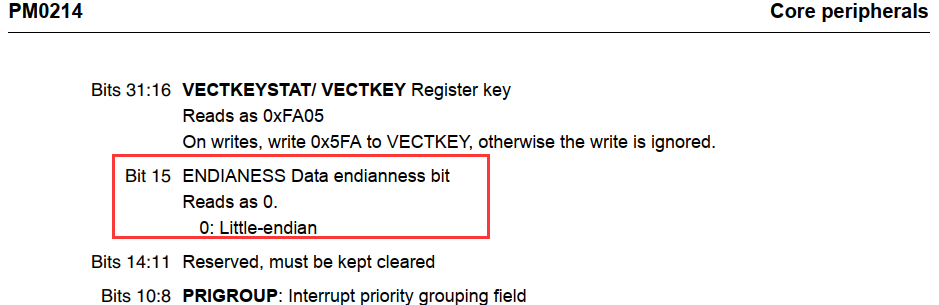
M内核支持大端或者小端,实际应用中大部分内核都是小端。以STM32为例,全部都是小端,而且是芯片设计之初就固化进去的,不可修改。市面上其他厂家基本也都固化的小端格式。
F1编程手册
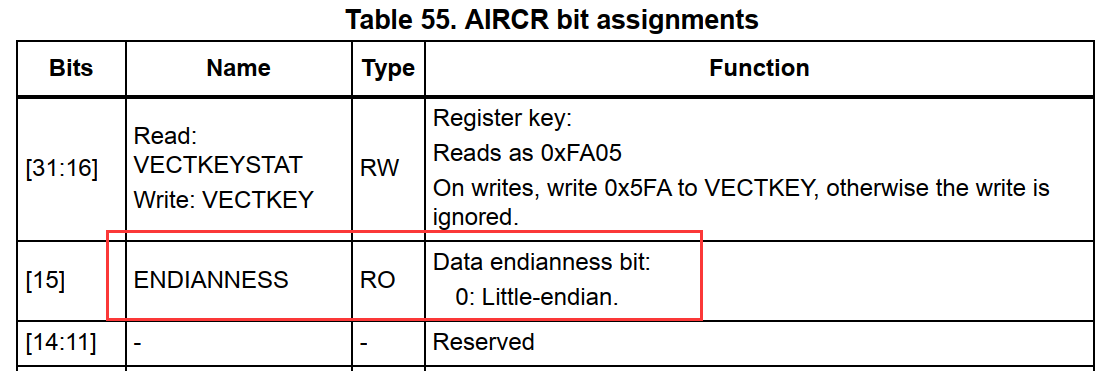
F3和F4编程手册
F7和H7编程手册
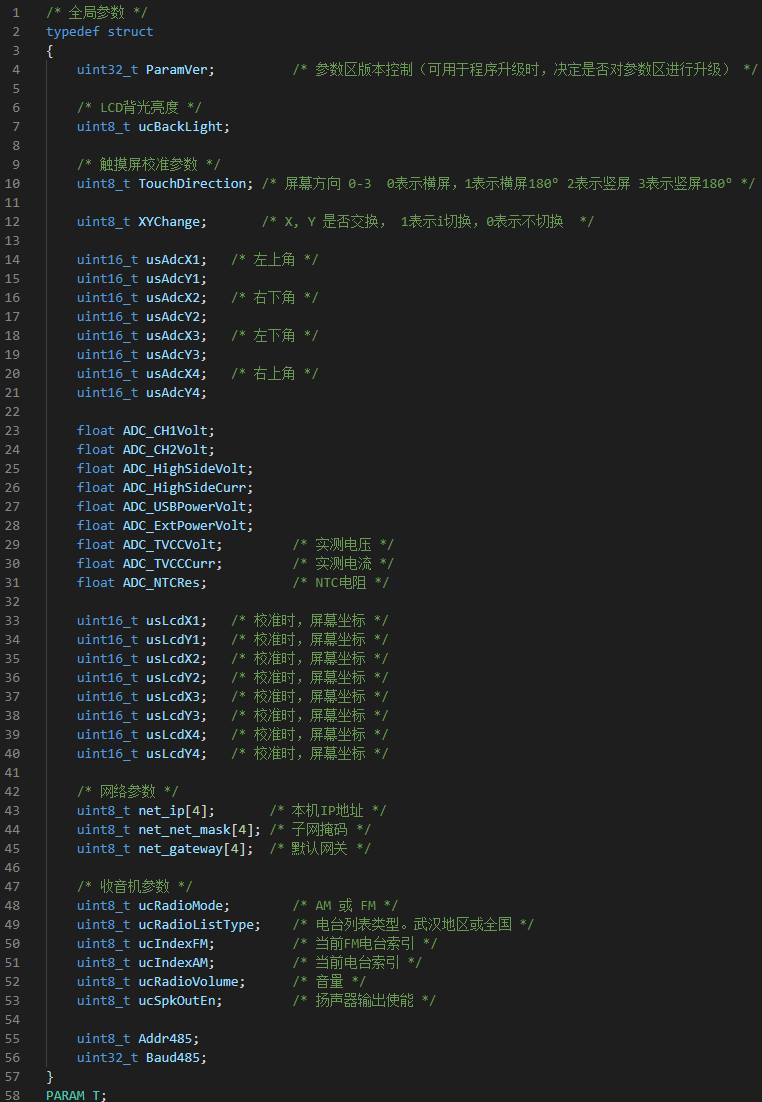
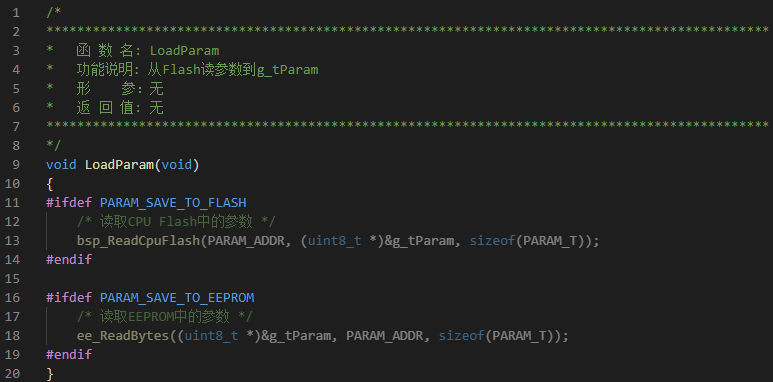
各种数据类型编程EEPROM,SPI Flash等存储器的简易方法,一般这些存储器都是字节编程,写入浮点等数据类型时不太方便。这里分享一个方法,定义一个结构体,将各种数据类型封装进去:
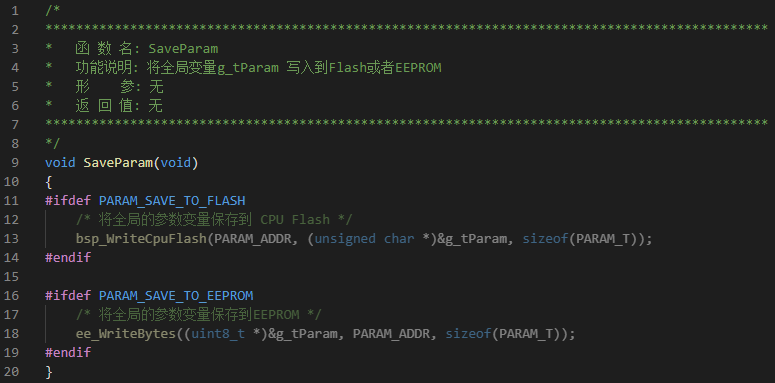
写入的时候采用下面方式:
读取时可以采用下面方式:
各种数据类型的SPI,UART,I2C等传输问题。这里我们以串口通信为例,比如主机要发送如下格式数据给从机:
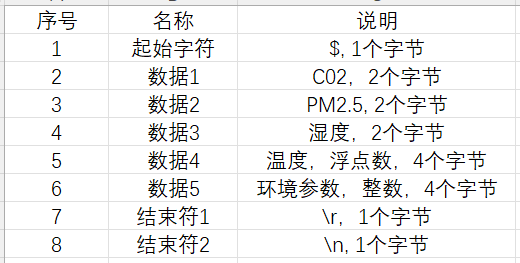
我们可以做一个如下结构体格式:
typedef struct
{
uint8_t ucStart;
uint16_t usCO2;
uint16_t usPM25;
uint16_t usHumidity;
float Temprature;
uint32_t ulParam;
uint8_t ucEnd1;
uint8_t ucEnd2;
}
UART_T;
UART_T g_tUartParam;
主机发送的时候我们就可以采用如下方法:
comSendBuf(COM1, (uint8_t *)&g_tUartParam, sizeof(UART_T));
从机工程也定义一个同样的结构体变量,比如我们把接收到一帧数据存到缓冲uint8_t buf[50]里面了。
我们就可以定义一个结构体指针变量:
UART_T *pUartParam;
pUartParam = (UART_T *)buf;
那么我们就可以pUartParam->usCO2, pUartParam->Temprature等方式来访问,非常方便。
代码实现
结构体数据如下:
typedef struct
{
uint8_t ucStart;
uint16_t usCO2;
uint16_t usPM25;
uint16_t usHumidity;
float Temprature;
uint32_t ulParam;
uint8_t ucEnd1;
uint8_t ucEnd2;
}
USART_T;
USART_T g_tUartParam; /* 串口1发送数据使用 */
USART_T *pUartParam; /* 串口2接数据使用 */
uint8_t buf[128]; /* 接收记录缓冲 */
数据收发处理:
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: c程序入口
* 形 参: 无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int main(void)
{
uint8_t ucKeyCode;
uint8_t read;
uint8_t ucStatus = 0; /* 状态机标志 */
uint8_t ucCount=0;
float ftest = 0.11f;
pUartParam = (USART_T *)buf;
bsp_Init(); /* 硬件初始化 */
PrintfLogo(); /* 打印例程名称和版本等信息 */
PrintfHelp(); /* 打印操作提示 */
bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */
memset(buf, 0, 128);
/* 进入主程序循环体 */
while (1)
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
/* 判断定时器超时时间 */
if (bsp_CheckTimer(0))
{
/* 每隔100ms 进来一次 */
bsp_LedToggle(2);
}
/* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下,串口1发送数据给串口2 */
g_tUartParam.ucStart = '$';
g_tUartParam.usCO2 = 1;
g_tUartParam.usPM25 = 2;
g_tUartParam.usHumidity = 3;
g_tUartParam.Temprature = ftest++;
g_tUartParam.ulParam = 5;
g_tUartParam.ucEnd1 = '\r';
g_tUartParam.ucEnd2 = '\n';
comSendBuf(COM1, (uint8_t *)&g_tUartParam, sizeof(UART_T));
printf("发送数据完成\r\n");
break;
default:
/* 其它的键值不处理 */
break;
}
}
/* 串口2接收数据解析处理 */
if (comGetChar(COM2, &read))
{
switch (ucStatus)
{
/* 状态0保证接收到0x01 */
case 0:
if(read == '$')
{
ucStatus = 1;
buf[ucCount++] = read;
}
break;
case 1:
buf[ucCount] = read;
/* 接收够15个数据 */
if((buf[ucCount-1] == '\r')&&(buf[ucCount] == '\n'))
{
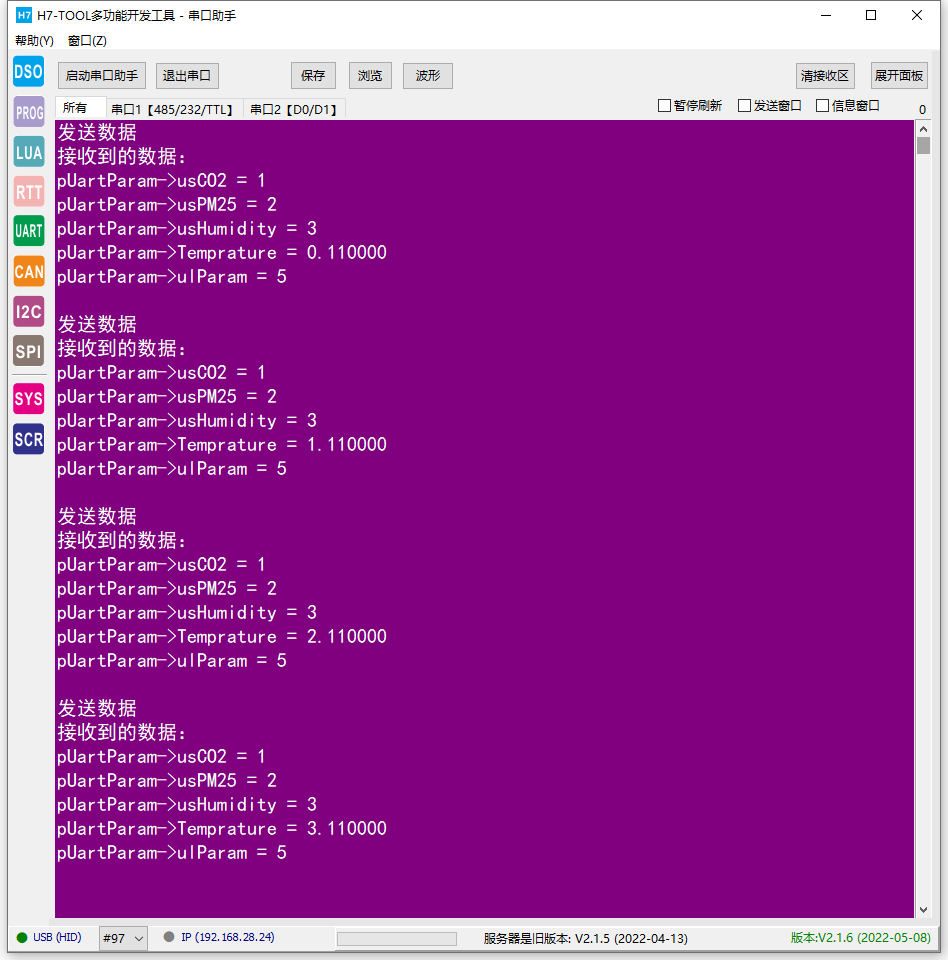
/* 打印接收到的数据值 */
printf("接收到的数据:\r\n");
printf("pUartParam->usCO2 = %d\r\n", pUartParam->usCO2);
printf("pUartParam->usPM25 = %d\r\n", pUartParam->usPM25);
printf("pUartParam->usHumidity = %d\r\n", pUartParam->usHumidity);
printf("pUartParam->Temprature = %f\r\n", pUartParam->Temprature);
printf("pUartParam->ulParam = %d\r\n", pUartParam->ulParam);
printf("\r\n");
memset(buf, 0, 128);
ucStatus = 0;
ucCount=0;
}
else
{
ucCount++;
}
break;
default:
break;
}
}
}
}
测试效果