一、简介
DQN算法是深度学习领域首次广泛应用于强化学习的算法模型之一。它于2013年由DeepMind公司的研究团队提出,通过将深度神经网络与经典的强化学习算法Q-learning结合,实现了对高维、连续状态空间的处理,具备了学习与规划的能力。
二、发展史
在DQN算法提出之前,强化学习中的经典算法主要是基于表格的Q学习算法。这些算法在处理简单的低维问题时表现出色,但随着状态和动作空间的增加,表格表示的存储和计算复杂度呈指数级增长。为了解决这个问题,研究人员开始探索使用函数逼近的方法,即使用参数化的函数代替表格。
之后,逐步发展出了一系列将深度学习应用于强化学习的算法。DQN算法是其中的一种。它是由Alex Krizhevsky等人在2013年提出的,是首个将深度学习与强化学习相结合的算法。DQN算法引入了经验回放和固定Q目标网络等技术,极大地提升了深度神经网络在强化学习中的性能。随后,DQN算法在Atari游戏中取得了比人类玩家更好的成绩,引起了广泛的关注和研究。
Q-learning:Q-learning是强化学习中的经典算法,由Watkins等人在1989年提出。它使用一个Q表格来存储状态和动作的价值,通过不断更新和探索来学习最优策略。然而,Q-learning算法在面对大规模状态空间时,无法扩展。
Deep Q-Network(DQN):DQN算法在2013年由DeepMind团队提出,通过使用深度神经网络来逼近Q函数的值,解决了状态空间规模大的问题。该算法采用了两个关键技术:经验回放和固定Q目标网络。
经验回放:经验回放是DQN算法的核心思想之一,它的基本原理是将智能体的经验存储在一个回放记忆库中,然后随机从中抽样,利用这些经验进行模型更新。这样做的好处是避免了样本间的相关性,提高了模型的稳定性和收敛速度。
固定Q目标网络:DQN算法使用两个神经网络,一个是主网络(online network),用于选择动作,并进行模型更新;另一个是目标网络(target network),用于计算目标Q值。目标网络的参数固定一段时间,这样可以减少目标的波动,提高模型的稳定性。
三、算法公式
本质:Q-learning+深度神经网络 = DQN
3.1 Q-learning算法公式
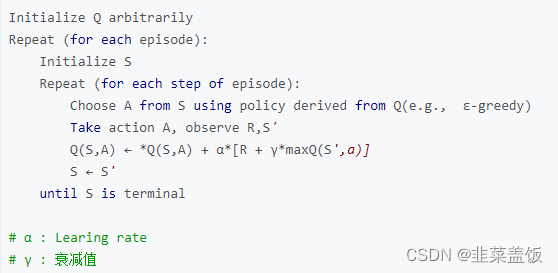
Q-learning算法通过不断更新Q值来学习最优策略,其更新公式如下:

3.2 DQN算法公式:

DQN算法通过最小化Q函数的均方差损失来进行模型更新。其更新公式如下:

四、算法原理
DQN算法的原理是通过利用深度神经网络逼近Q函数的值,实现对高维、连续状态空间的处理。其核心思想是通过不断更新神经网络的参数,使其的输出Q值逼近真实的Q值,从而学习最优策略。
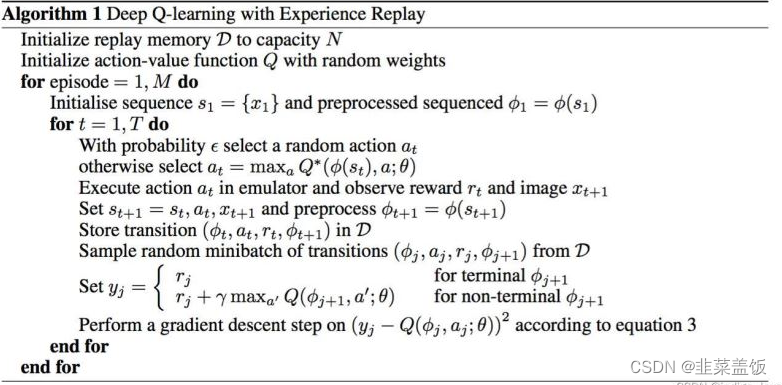
DQN算法的工作原理如下:
初始化:初始化主网络和目标网络的参数。
选择动作:根据当前状态s,使用ε-greedy策略选择动作a。
执行动作并观察回报:采取动作a,与环境交互,观察下一个状态s’和立即回报r。
存储经验:将(s, a, r, s’)存储到经验回放记忆库中。
从经验回放记忆库中随机抽样:从记忆库中随机抽样一批经验。
计算目标Q值:使用目标网络计算目标Q值,即max(Q(s’, a, θ-))。
更新主网络:根据损失函数L(θ)进行模型参数更新。
更新目标网络:定期更新目标网络的参数。
重复步骤2-8,直到达到终止条件。
五、算法功能
DQN算法具有以下功能:
处理高维、连续状态空间:通过深度神经网络的逼近能力,可以处理高维、连续状态空间的问题。
学习和规划能力:通过与环境的交互和不断试错,DQN算法可以学习到最优策略,并具备一定的规划能力。
稳定性和收敛速度高:DQN算法通过经验回放和固定Q目标网络等技术,提高了模型的稳定性和收敛速度。
六、示例代码
以下是一个使用DQN算法解决经典的CartPole问题的示例代码:
# -*- coding: utf-8 -*-
import gym
import numpy as np
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Dense
from tensorflow.keras.optimizers import Adam
env = gym.make('CartPole-v0')
n_actions = env.action_space.n
n_states = env.observation_space.shape[0]
def create_dqn_model():
model = Sequential()
model.add(Dense(32, input_shape=(n_states,), activation='relu'))
model.add(Dense(32, activation='relu'))
model.add(Dense(n_actions, activation='linear'))
model.compile(loss='mse', optimizer=Adam(lr=0.001))
return model
def choose_action(state, epsilon):
if np.random.rand() < epsilon:
return np.random.choice(n_actions)
else:
q_values = model.predict(state)
return np.argmax(q_values[0])
def train_dqn():
epsilon = 1.0
epsilon_min = 0.01
epsilon_decay = 0.995
batch_size = 32
replay_memory = []
for episode in range(500):
state = env.reset()
state = np.reshape(state, [1, n_states])
done = False
steps = 0
while not done:
env.render()
action = choose_action(state, epsilon)
next_state, reward, done, _ = env.step(action)
next_state = np.reshape(next_state, [1, n_states])
replay_memory.append((state, action, reward, next_state, done))
state = next_state
steps += 1
if done:
print("Episode: %d, Steps: %d" % (episode, steps))
break
if len(replay_memory) > batch_size:
minibatch = np.random.choice(replay_memory, batch_size, replace=False)
states_mb = np.concatenate([mb[0] for mb in minibatch])
actions_mb = np.array([mb[1] for mb in minibatch])
rewards_mb = np.array([mb[2] for mb in minibatch])
next_states_mb = np.concatenate([mb[3] for mb in minibatch])
dones_mb = np.array([mb[4] for mb in minibatch])
targets = rewards_mb + 0.99 * (np.amax(model.predict_on_batch(next_states_mb), axis=1)) * (1 - dones_mb)
targets_full = model.predict_on_batch(states_mb)
ind = np.array([i for i in range(batch_size)])
targets_full[[ind], [actions_mb]] = targets
model.fit(states_mb, targets_full, epochs=1, verbose=0)
if epsilon > epsilon_min:
epsilon *= epsilon_decay
env.close()
if __name__ == '__main__':
model = create_dqn_model()
train_dqn()
参考:
https://www.ngui.cc/el/2433927.html?action=onClick
https://blog.csdn.net/Zhang_0702_China/article/details/123423637
https://www.jb51.net/article/231665.htm
http://lihuaxi.xjx100.cn/news/1290031.html?action=onClick