模拟行走机器人
力扣链接:874. 模拟行走机器人
题目描述
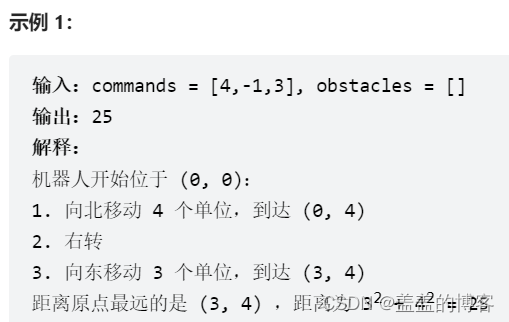
机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands :
-2 :向左转 90 度
-1 :向右转 90 度
1 <= x <= 9 :向前移动 x 个单位长度
在网格上有一些格子被视为障碍物 obstacles 。第 i 个障碍物位于网格点 obstacles[i] = (xi, yi) 。
机器人无法走到障碍物上,它将会停留在障碍物的前一个网格方块上,但仍然可以继续尝试进行该路线的其余部分。
返回从原点到机器人所有经过的路径点(坐标为整数)的最大欧式距离的平方。(即,如果距离为 5 ,则返回 25 )
示例
官方题解
class Solution {
public int robotSim(int[] commands, int[][] obstacles) {
int[][] dirs = {{-1, 0}, {0, 1}, {1, 0}, {0, -1}};
int px = 0, py = 0, d = 1;
Set<Integer> set = new HashSet<Integer>();
for (int[] obstacle : obstacles) {
set.add(obstacle[0] * 60001 + obstacle[1]);
}
int res = 0;
for (int c : commands) {
if (c < 0) {
d += c == -1 ? 1 : -1;
d %= 4;
if (d < 0) {
d += 4;
}
} else {
for (int i = 0; i < c; i++) {
if (set.contains((px + dirs[d][0]) * 60001 + py + dirs[d][1])) {
break;
}
px += dirs[d][0];
py += dirs[d][1];
res = Math.max(res, px * px + py * py);
}
}
}
return res;
}
}
Java代码
class Solution {
private int[][] dir = {{0, 1}, {1, 0}, {0, -1}, {-1, 0}};
private HashSet<String> set;
public int robotSim(int[] commands, int[][] obstacles) {
int[] position = {0, 0};
set = new HashSet<>();
for (int i = 0; i < obstacles.length; i++) {
int[] pos = obstacles[i];
String p = pos[0] + "_" + pos[1];
set.add(p);
}
int derc = 0;
int max = 0;
for (int i = 0; i < commands.length; i++) {
switch (commands[i]) {
case -1: {
derc = (derc + 1 ) % 4;
break;
}
case -2: {
derc = (derc - 1 + 4) % 4;
break;
}
default: {
walk(position, derc, commands[i]);
}
}
max = Math.max(position[1] * position[1] + position[0] * position[0], max);
}
return max;
}
public void walk(int[] pos, int derc, int length) {
int[] delta = dir[derc];
while (length > 0) {
pos[0] += delta[0];
pos[1] += delta[1];
if (set.contains(pos[0] + "_" + pos[1])) {
pos[0] -= delta[0];
pos[1] -= delta[1];
break;
}
length--;
}
}
}
来源:力扣(LeetCode)
链接:https://leetcode.cn/problems/walking-robot-simulation
著作权归领扣网络所有。商业转载请联系官方授权,非商业转载请注明出处。


](https://img-blog.csdnimg.cn/30d2ce4f67504618ad226e1c313f549f.png)