人脸识别

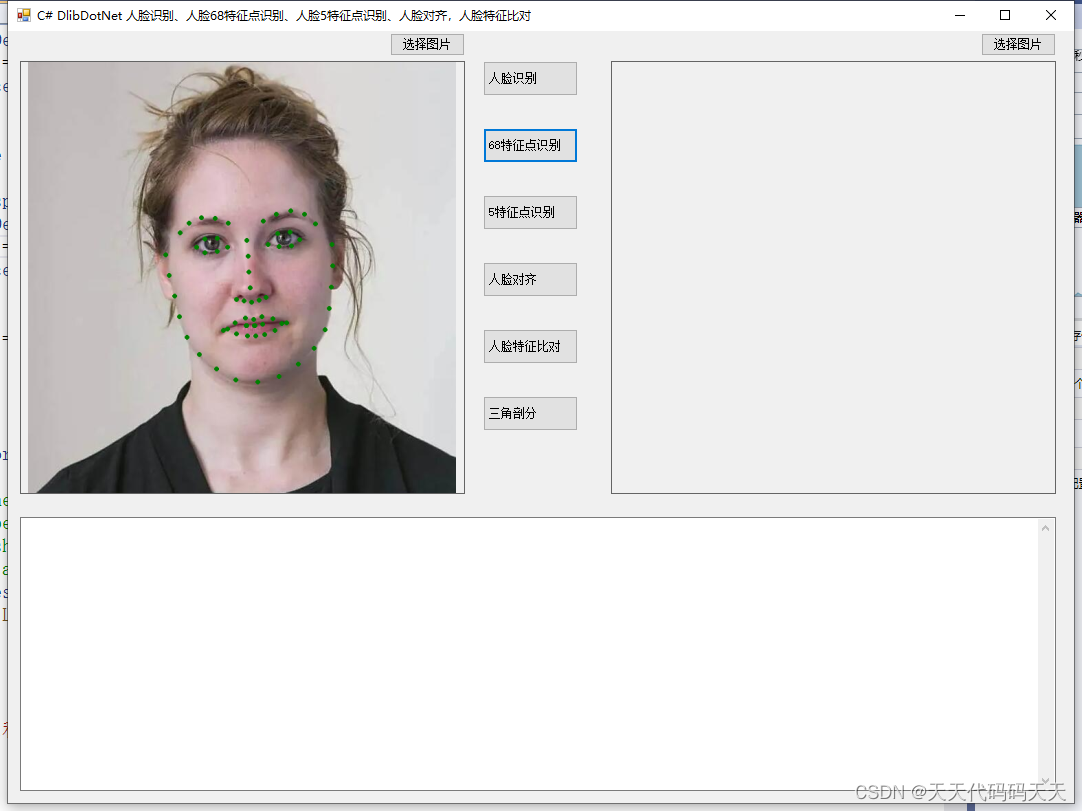
人脸68特征点识别
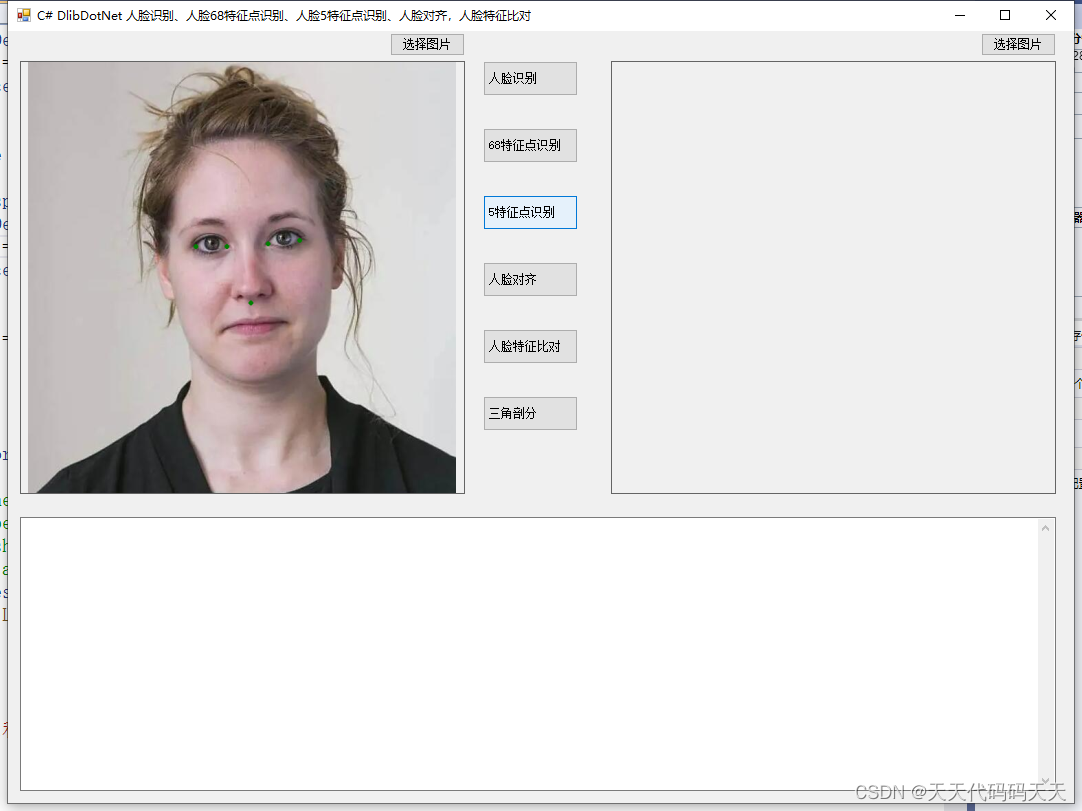
人脸5特征点识别
人脸对齐

三角剖分

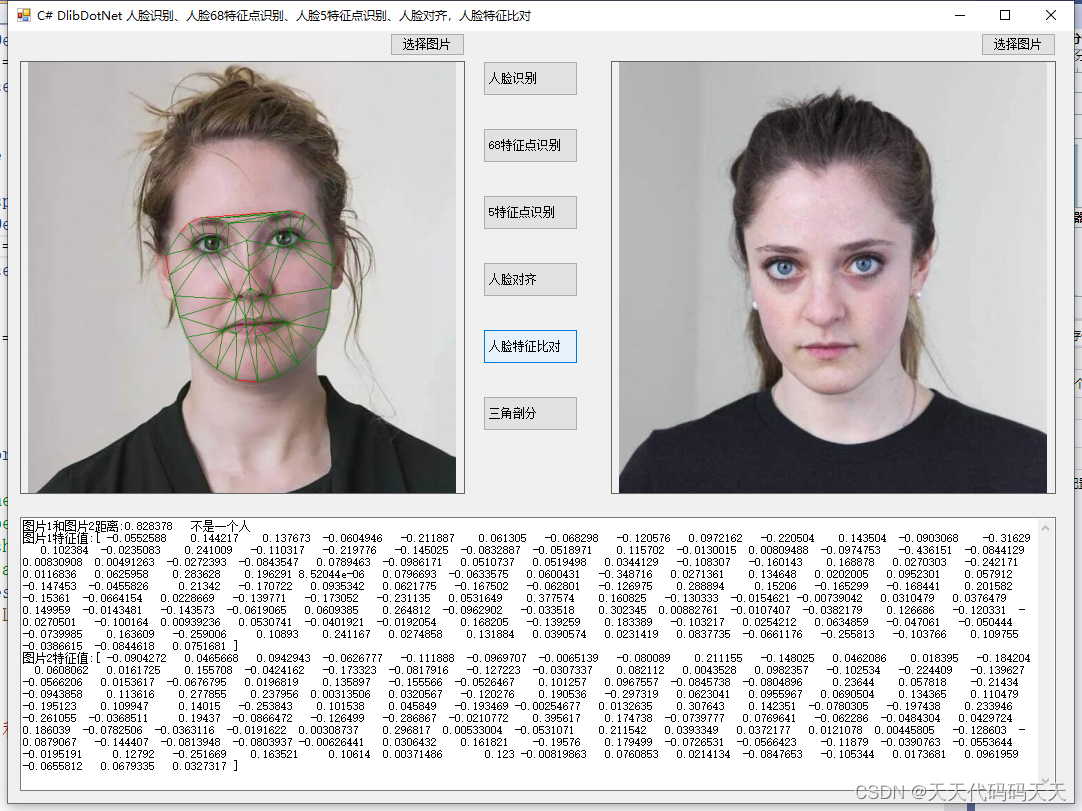
人脸特征比对
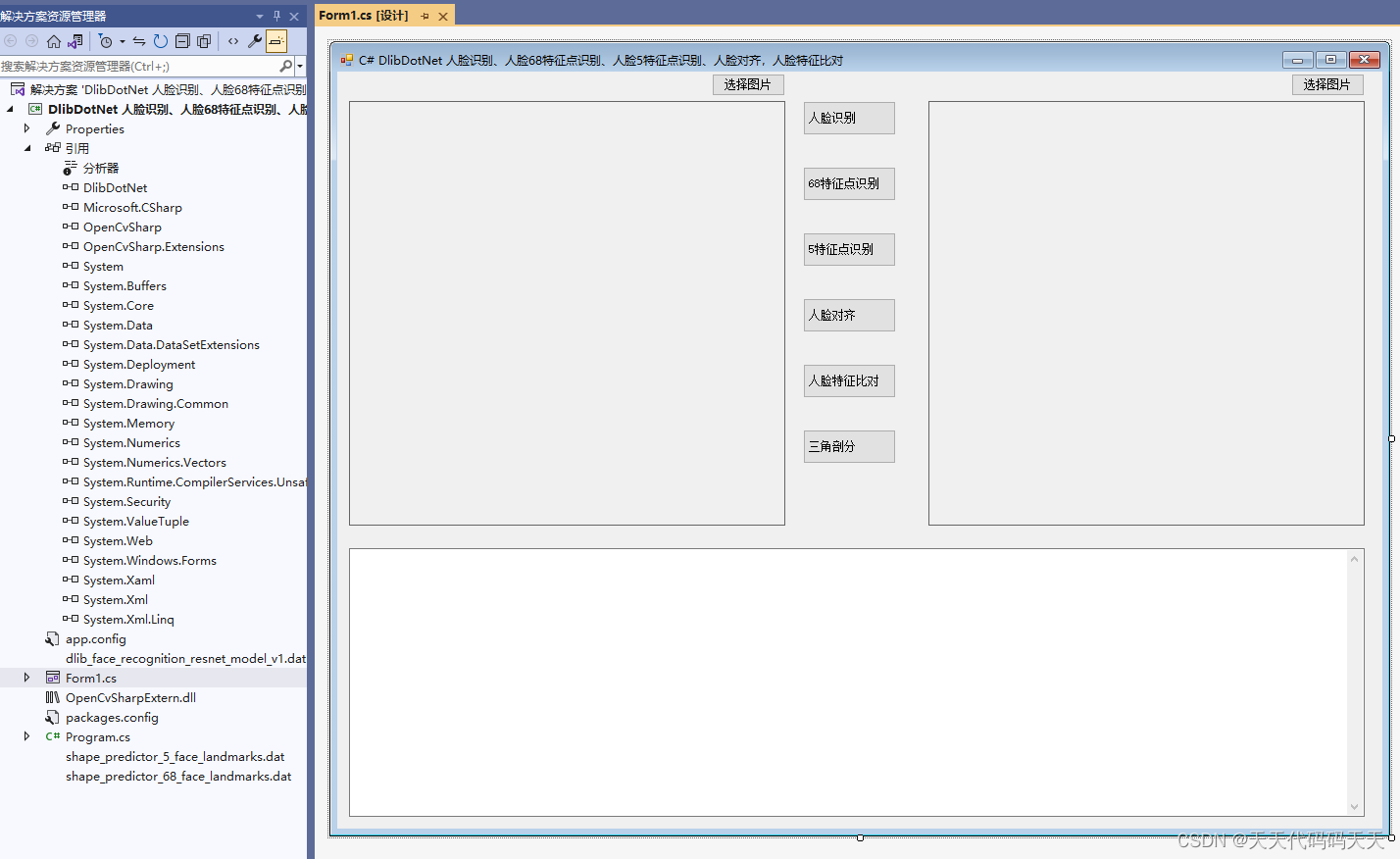
 项目
项目
VS2022+.net4.8+OpenCvSharp4+DlibDotNet
Demo下载
代码
using DlibDotNet.Extensions;
using DlibDotNet;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Text;
using System.Windows.Forms;
using static System.Windows.Forms.VisualStyles.VisualStyleElement;
using OpenCvSharp;
using System.Drawing.Imaging;
using System.Globalization;
namespace DlibDotNet_人脸识别_人脸68特征点识别_人脸5特征点识别
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string imgPath = "";
string imgPath2 = "";
string startupPath = "";
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
imgPath = ofd.FileName;
pictureBox1.Image = new Bitmap(imgPath);
}
private void button2_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox2.Image = null;
imgPath2 = ofd.FileName;
pictureBox2.Image = new Bitmap(imgPath2);
}
private void Form1_Load(object sender, EventArgs e)
{
string startupPath = Application.StartupPath;
Dlib.Encoding = Environment.OSVersion.Platform == PlatformID.Win32NT ? Encoding.GetEncoding(CultureInfo.CurrentCulture.TextInfo.ANSICodePage) : Encoding.UTF8;
}
/// <summary>
/// 人脸识别
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button3_Click(object sender, EventArgs e)
{
if (imgPath == "")
{
return;
}
using (var faceDetector = Dlib.GetFrontalFaceDetector())
using (var image = Dlib.LoadImage<RgbPixel>(imgPath))
{
var dets = faceDetector.Operator(image);
foreach (var r in dets)
Dlib.DrawRectangle(image, r, new RgbPixel { Green = 255 });
var result = image.ToBitmap();
this.pictureBox1.Invoke(new Action(() =>
{
this.pictureBox1.Image?.Dispose();
this.pictureBox1.Image = result;
}));
}
}
/// <summary>
/// 5特征点识别
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button5_Click(object sender, EventArgs e)
{
if (imgPath == "")
{
return;
}
string faceDataPath = "shape_predictor_5_face_landmarks.dat";
Mat mat = new Mat(imgPath);
Bitmap bmp = new Bitmap(imgPath);
bmp = Get24bppRgb(bmp);
// 图像转换到Dlib的图像类中
Array2D<RgbPixel> img = DlibDotNet.Extensions.BitmapExtensions.ToArray2D<RgbPixel>(bmp);
var faceDetector = Dlib.GetFrontalFaceDetector();
var shapePredictor = ShapePredictor.Deserialize(faceDataPath);
// 检测人脸
var faces = faceDetector.Operator(img);
if (faces.Count() == 0) { return; }
// 人脸区域中识别脸部特征
var shape = shapePredictor.Detect(img, faces[0]);
var bradleyPoints = (from i in Enumerable.Range(0, (int)shape.Parts)
let p = shape.GetPart((uint)i)
select new OpenCvSharp.Point(p.X, p.Y)).ToArray();
foreach (var item in bradleyPoints)
{
Cv2.Circle(mat, item.X, item.Y, 2, Scalar.Green, 2);
}
pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(mat);
}
// Convert to Format24bppRgb
private static Bitmap Get24bppRgb(System.Drawing.Image image)
{
var bitmap = new Bitmap(image);
var bitmap24 = new Bitmap(bitmap.Width, bitmap.Height, PixelFormat.Format24bppRgb);
using (var gr = Graphics.FromImage(bitmap24))
{
gr.DrawImage(bitmap, new System.Drawing.Rectangle(0, 0, bitmap24.Width, bitmap24.Height));
}
return bitmap24;
}
/// <summary>
/// 68特征点识别
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button4_Click(object sender, EventArgs e)
{
if (imgPath == "")
{
return;
}
string faceDataPath = "shape_predictor_68_face_landmarks.dat";
Mat mat = new Mat(imgPath);
Bitmap bmp = new Bitmap(imgPath);
bmp = Get24bppRgb(bmp);
// 图像转换到Dlib的图像类中
Array2D<RgbPixel> img = DlibDotNet.Extensions.BitmapExtensions.ToArray2D<RgbPixel>(bmp);
var faceDetector = Dlib.GetFrontalFaceDetector();
var shapePredictor = ShapePredictor.Deserialize(faceDataPath);
// 检测人脸
var faces = faceDetector.Operator(img);
if (faces.Count() == 0) { return; }
// 人脸区域中识别脸部特征
var shape = shapePredictor.Detect(img, faces[0]);
var bradleyPoints = (from i in Enumerable.Range(0, (int)shape.Parts)
let p = shape.GetPart((uint)i)
select new OpenCvSharp.Point(p.X, p.Y)).ToArray();
foreach (var item in bradleyPoints)
{
Cv2.Circle(mat, item.X, item.Y, 2, Scalar.Green, 2);
}
pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(mat);
}
/// <summary>
/// 人脸对齐
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button6_Click(object sender, EventArgs e)
{
if (imgPath == "")
{
return;
}
var path = imgPath;
string faceDataPath = "shape_predictor_68_face_landmarks.dat";
using (var faceDetector = Dlib.GetFrontalFaceDetector())
using (var img = Dlib.LoadImage<RgbPixel>(path))
{
Dlib.PyramidUp(img);
var shapePredictor = ShapePredictor.Deserialize(faceDataPath);
var dets = faceDetector.Operator(img);
var shapes = new List<FullObjectDetection>();
foreach (var rect in dets)
{
var shape = shapePredictor.Detect(img, rect);
if (shape.Parts <= 2)
continue;
shapes.Add(shape);
}
if (shapes.Any())
{
var lines = Dlib.RenderFaceDetections(shapes);
foreach (var line in lines)
Dlib.DrawLine(img, line.Point1, line.Point2, new RgbPixel
{
Green = 255
});
var wb = img.ToBitmap();
this.pictureBox1.Image?.Dispose();
this.pictureBox1.Image = wb;
foreach (var l in lines)
l.Dispose();
var chipLocations = Dlib.GetFaceChipDetails(shapes);
using (var faceChips = Dlib.ExtractImageChips<RgbPixel>(img, chipLocations))
using (var tileImage = Dlib.TileImages(faceChips))
{
// It is NOT necessary to re-convert WriteableBitmap to Matrix.
// This sample demonstrate converting managed image class to
// dlib class and vice versa.
using (var tile = tileImage.ToBitmap())
using (var mat = tile.ToMatrix<RgbPixel>())
{
var tile2 = mat.ToBitmap();
this.pictureBox1.Image?.Dispose();
this.pictureBox1.Image = tile2;
}
}
foreach (var c in chipLocations)
c.Dispose();
}
foreach (var s in shapes)
s.Dispose();
}
}
/// <summary>
/// 人脸特征比对
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button7_Click(object sender, EventArgs e)
{
textBox1.Text = "";
if (imgPath == "" || imgPath2 == "")
{
return;
}
var detector = Dlib.GetFrontalFaceDetector();
var sp = ShapePredictor.Deserialize("shape_predictor_5_face_landmarks.dat");
var net = DlibDotNet.Dnn.LossMetric.Deserialize("dlib_face_recognition_resnet_model_v1.dat");
var img1 = Dlib.LoadImageAsMatrix<RgbPixel>(imgPath);
var img2 = Dlib.LoadImageAsMatrix<RgbPixel>(imgPath2);
var faces = new List<Matrix<RgbPixel>>();
foreach (var face in detector.Operator(img1))
{
var shape = sp.Detect(img1, face);
var faceChipDetail = Dlib.GetFaceChipDetails(shape, 150, 0.25);
var faceChip = Dlib.ExtractImageChip<RgbPixel>(img1, faceChipDetail);
faces.Add(faceChip);
}
foreach (var face in detector.Operator(img2))
{
var shape = sp.Detect(img2, face);
var faceChipDetail = Dlib.GetFaceChipDetails(shape, 150, 0.25);
var faceChip = Dlib.ExtractImageChip<RgbPixel>(img2, faceChipDetail);
faces.Add(faceChip);
}
if (faces.Count != 2)
{
return;
}
var faceDescriptors = net.Operator(faces);
// Faces are connected in the graph if they are close enough. Here we check if
// the distance between two face descriptors is less than 0.6, which is the
// decision threshold the network was trained to use. Although you can
// certainly use any other threshold you find useful.
var diff = faceDescriptors[1] - faceDescriptors[0];
float len = Dlib.Length(diff);
String str = "";
if (len < 0.6)
{
str += "图片1和图片2距离:" + len.ToString() + " 是一个人" + "\r\n";
}
else
{
str += "图片1和图片2距离:" + len.ToString() + " 不是一个人" + "\r\n";
}
str += "图片1特征值:[" + faceDescriptors[0].ToString() + "]\r\n";
str += "图片2特征值:[" + faceDescriptors[1].ToString() + "]\r\n";
textBox1.Text = str;
}
/// <summary>
/// 三角剖分
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button8_Click(object sender, EventArgs e)
{
if (imgPath == "")
{
return;
}
string faceDataPath = "shape_predictor_68_face_landmarks.dat";
Mat mat = new Mat(imgPath);
Bitmap bmp = new Bitmap(imgPath);
bmp = Get24bppRgb(bmp);
// 图像转换到Dlib的图像类中
Array2D<RgbPixel> img = DlibDotNet.Extensions.BitmapExtensions.ToArray2D<RgbPixel>(bmp);
var faceDetector = Dlib.GetFrontalFaceDetector();
var shapePredictor = ShapePredictor.Deserialize(faceDataPath);
// 检测人脸
var faces = faceDetector.Operator(img);
if (faces.Count() == 0)
{
return;
}
// 人脸区域中识别脸部特征
var shape = shapePredictor.Detect(img, faces[0]);
var bradleyPoints = (from i in Enumerable.Range(0, (int)shape.Parts)
let p = shape.GetPart((uint)i)
select new OpenCvSharp.Point(p.X, p.Y)).ToArray();
pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(mat);
//凸包提取
var hull = Cv2.ConvexHullIndices(bradleyPoints);
var bradleyHull = (from i in hull
select bradleyPoints[i]).ToArray();
for (int i = 0; i < bradleyHull.Length - 1; i++)
{
Cv2.Line(mat, bradleyHull[i].X, bradleyHull[i].Y, bradleyHull[i + 1].X, bradleyHull[i + 1].Y, Scalar.Red);
}
Cv2.Line(mat, bradleyHull[bradleyHull.Length - 1].X, bradleyHull[bradleyHull.Length - 1].Y, bradleyHull[0].X, bradleyHull[0].Y, Scalar.Red);
pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(mat);
RotatedRect minAreaRect = Cv2.MinAreaRect(bradleyPoints);
//三角剖分
Subdiv2D subdiv = new Subdiv2D();
Rect rect = new Rect(0, 0, pictureBox1.Image.Width, pictureBox1.Image.Height);
subdiv.InitDelaunay(rect);
// 添加与绘制特征点
for (int i = 0; i < bradleyPoints.Length; i++)
{
subdiv.Insert(new Point2f(bradleyPoints[i].X, bradleyPoints[i].Y));
}
// 生成剖分三角形
Vec6f[] triangleList = subdiv.GetTriangleList();
OpenCvSharp.Point[] pt = new OpenCvSharp.Point[3];
// 绘制剖分三角形
for (int i = 0; i < triangleList.Length; i++)
{
Vec6f t = triangleList[i];
pt[0] = new OpenCvSharp.Point((int)t[0], (int)t[1]);
pt[1] = new OpenCvSharp.Point((int)t[2], (int)t[3]);
pt[2] = new OpenCvSharp.Point((int)t[4], (int)t[5]);
Cv2.Line(mat, pt[0], pt[1], Scalar.Green, 1);
Cv2.Line(mat, pt[1], pt[2], Scalar.Green, 1);
Cv2.Line(mat, pt[2], pt[1], Scalar.Green, 1);
}
pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(mat);
}
}
}