前言
欢迎来到小K的Leetcode|代码随想录|专题化专栏,今天将为大家带来链表相交和环形链表 II的分享✨
目录
- 前言
- 面试题 02.07. 链表相交
- 142. 环形链表 II
- 总结
面试题 02.07. 链表相交
✨题目链接点这里
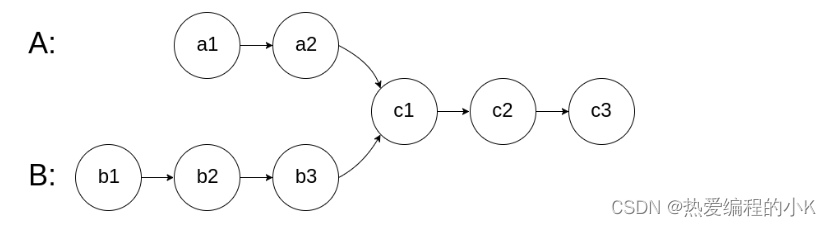
给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表没有交点,返回 null 。
图示两个链表在节点 c1 开始相交:
题目数据 保证 整个链式结构中不存在环。
注意,函数返回结果后,链表必须 保持其原始结构 。
示例 1:
输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,0,1,8,4,5], skipA = 2, skipB = 3
输出:Intersected at ‘8’
解释:相交节点的值为 8 (注意,如果两个链表相交则不能为 0)。
从各自的表头开始算起,链表 A 为 [4,1,8,4,5],链表 B 为 [5,0,1,8,4,5]。
在 A 中,相交节点前有 2 个节点;在 B 中,相交节点前有 3 个节点。
示例 2:
输入:intersectVal = 2, listA = [0,9,1,2,4], listB = [3,2,4], skipA = 3, skipB = 1
输出:Intersected at ‘2’
解释:相交节点的值为 2 (注意,如果两个链表相交则不能为 0)。
从各自的表头开始算起,链表 A 为 [0,9,1,2,4],链表 B 为 [3,2,4]。
在 A 中,相交节点前有 3 个节点;在 B 中,相交节点前有 1 个节点。
示例 3:
输入:intersectVal = 0, listA = [2,6,4], listB = [1,5], skipA = 3, skipB = 2
输出:null
解释:从各自的表头开始算起,链表 A 为 [2,6,4],链表 B 为 [1,5]。
由于这两个链表不相交,所以 intersectVal 必须为 0,而 skipA 和 skipB 可以是任意值。
这两个链表不相交,因此返回 null 。
提示:
listA 中节点数目为 m
listB 中节点数目为 n
0 <= m, n <= 3 * 104
1 <= Node.val <= 105
0 <= skipA <= m
0 <= skipB <= n
如果 listA 和 listB 没有交点,intersectVal 为 0
如果 listA 和 listB 有交点,intersectVal == listA[skipA + 1] == listB[skipB + 1]
思路:这道题目也是双指针的一种用法,我们先定义两个指针分别指向两个链表的头结点,然后让指向较长链表的指针朝后移动,和较短链表的那个指针对其,最后就是移动,循环比较,返回第一个 两个指针指向同一节点的情况,没找到则返回空
class Solution {
public:
ListNode *getIntersectionNode(ListNode *headA, ListNode *headB) {
ListNode* curA = headA, *curB = headB;
int lenA = 0, lenB = 0;
while (curA != nullptr) {
lenA++;
curA = curA->next;
}
while (curB != nullptr) {
lenB++;
curB = curB->next;
}
curA = headA;
curB = headB;
if (lenA < lenB){
swap(lenA,lenB);
swap(curA,curB);
}
int gap = lenA - lenB;
while (gap--) curA = curA->next;
while (curA != nullptr) {
if(curA == curB) return curA;
curA = curA->next;
curB = curB->next;
}
return nullptr;
}
};

142. 环形链表 II
✨题目链接点这里
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递,仅仅是为了标识链表的实际情况。
不允许修改 链表。
示例 1:
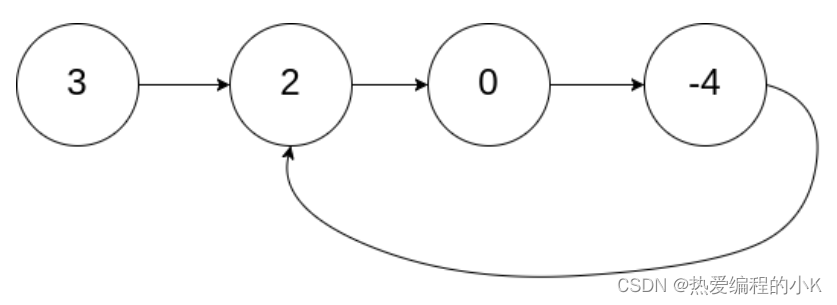
输入:head = [3,2,0,-4], pos = 1
输出:返回索引为 1 的链表节点
解释:链表中有一个环,其尾部连接到第二个节点。
示例 2:
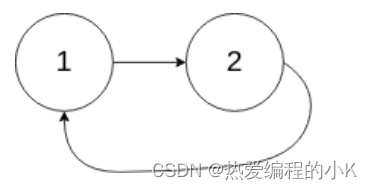
输入:head = [1,2], pos = 0
输出:返回索引为 0 的链表节点
解释:链表中有一个环,其尾部连接到第一个节点。
示例 3:
输入:head = [1], pos = -1
输出:返回 null
解释:链表中没有环。
提示:
链表中节点的数目范围在范围 [0, 104] 内
-105 <= Node.val <= 105
pos 的值为 -1 或者链表中的一个有效索引
思路:解决这个问题我们需要明确下面两个问题
- 判断链表是否有环
- 如果有环,如何找到这个环的入口
问题一:判断链表是否有环
可以使用快慢指针法,定义一个快指针 fast 和一个慢指针 slow ,从头结点开始,每次让快指针移动两个节点,慢指针每次移动一个节点,如果在途中相遇,则代表有环
相遇一定在环内相遇,这是为什么?快指针一定比慢指针先入环
为什么快慢指针一定会相遇?快指针一次移动两步,而慢指针一次移动一步,所以快指针相当于是以每次一步来追赶慢指针,所以一定会相遇
问题二:找环的入口
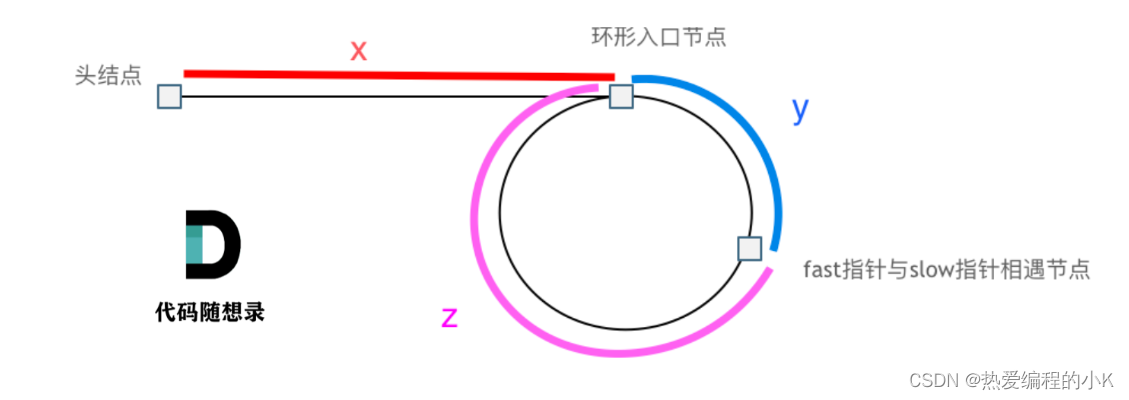
假设从头结点到环形入口节点 的节点数为x。 环形入口节点到 fast指针与slow指针相遇节点 节点数为y。 从相遇节点 再到环形入口节点节点数为 z。
那么相遇时: slow指针走过的节点数为:x + y, fast指针走过的节点数:x + y + n (y + z),n为fast指针在环内走了n圈才遇到slow指针,(y+z)为 一圈内节点的个数A
则有:(x + y) * 2 = x + y + n (y + z)
化简得x = (n - 1)(y + z) + z ,注意这里n一定是大于等于1的,因为 fast指针至少要多走一圈才能相遇slow指针。当n等于一和大于一的效果是一样的,因为当n大于一就相当于快指针在环内多转了几圈
class Solution {
public:
ListNode *detectCycle(ListNode *head) {
ListNode* slow = head;
ListNode* fast = head;
while (fast != nullptr && fast->next != nullptr) {
slow = slow->next;
fast = fast->next->next;
if (slow == fast) {
ListNode* index1 = head;
ListNode* index2 = fast;
while (index1 != index2) {
index1 = index1->next;
index2 = index2->next;
}
return index1;
}
}
return nullptr;
}
};

总结
今天的收获还是挺大的,这个环形链表不难,但是很有意思,有点写数学题的感觉,一步一步揭开面纱真的很舒服~