官方的安装和配置教程https://github.com/RoboSense-LiDAR/rslidar_sdk/
1.手动下载sdk,下载tar.gz,然后解压缩:Releases · RoboSense-LiDAR/rslidar_sdk · GitHub
2.个人电脑连接速腾激光雷达后,确保能够ping通。当连接网线后,电脑的网卡驱动会自动识别
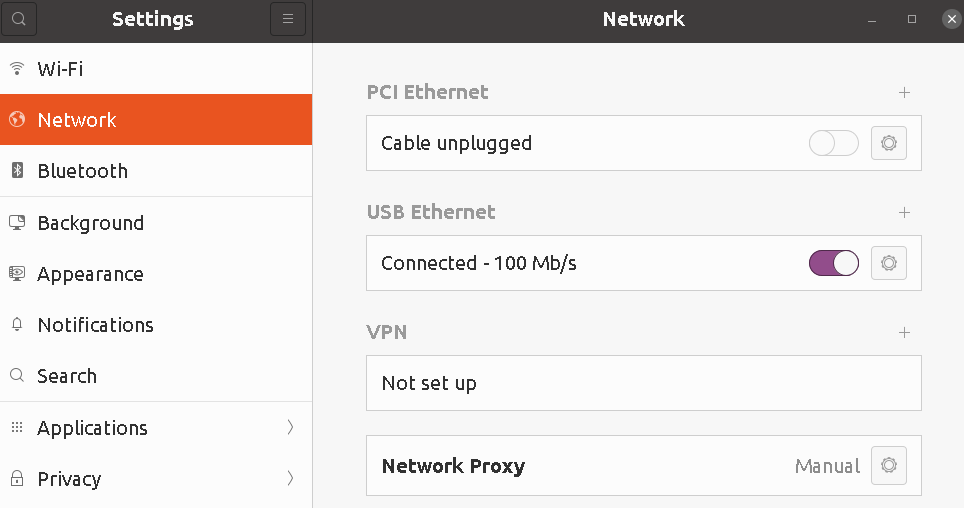
紫色的那个网口连接的就是速腾的激光雷达,接着点击设置按钮
#主机的网口以太网配置,手动-IPV4
#IP:192.168.1.102 掩码 255.255.255.0 网关可以不设置
然后ping雷达的IP地址,我的是192.168.1.200
$ ping 192.168.1.200出现以下信息就表示正常。

3.根据你ubuntu的系统版本,先安装对应版本的ROS。ROS有两个版本:ROS1和ROS2.
我的版本是ubuntu20.04+ ROS-noetic 。
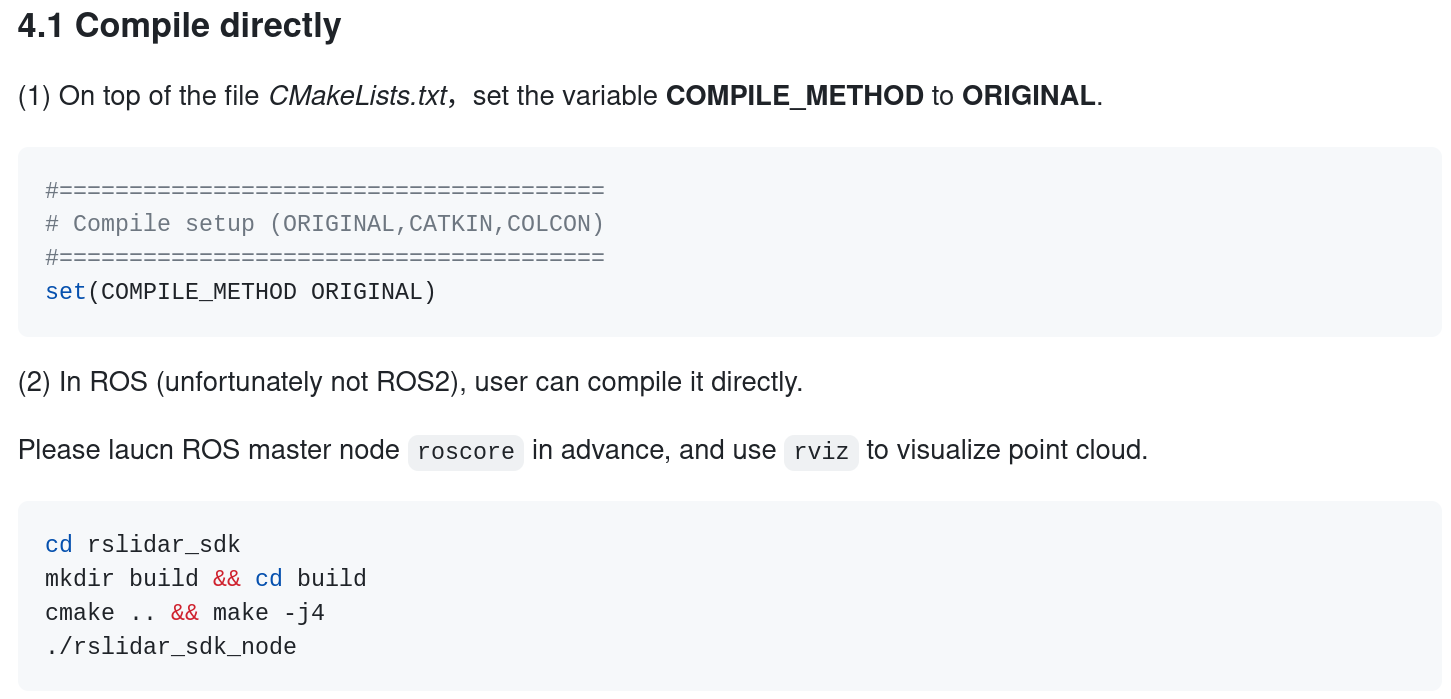
接着开始编译,我选择的编译方式是官方教程4.1
4.源码编译,在运行./rslidar_sdk_node之前,确保开启了roscore.
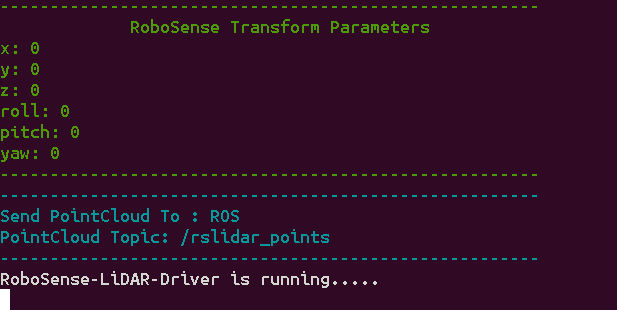
当我运行./rslidar_sdk_node时,出现如下界面,表示运行正常。
假如你出现了如下界面,说明你配置文件里面雷达的类型设置的不对。
配置文件在这个地方 rslidar_sdk/config/config.yaml
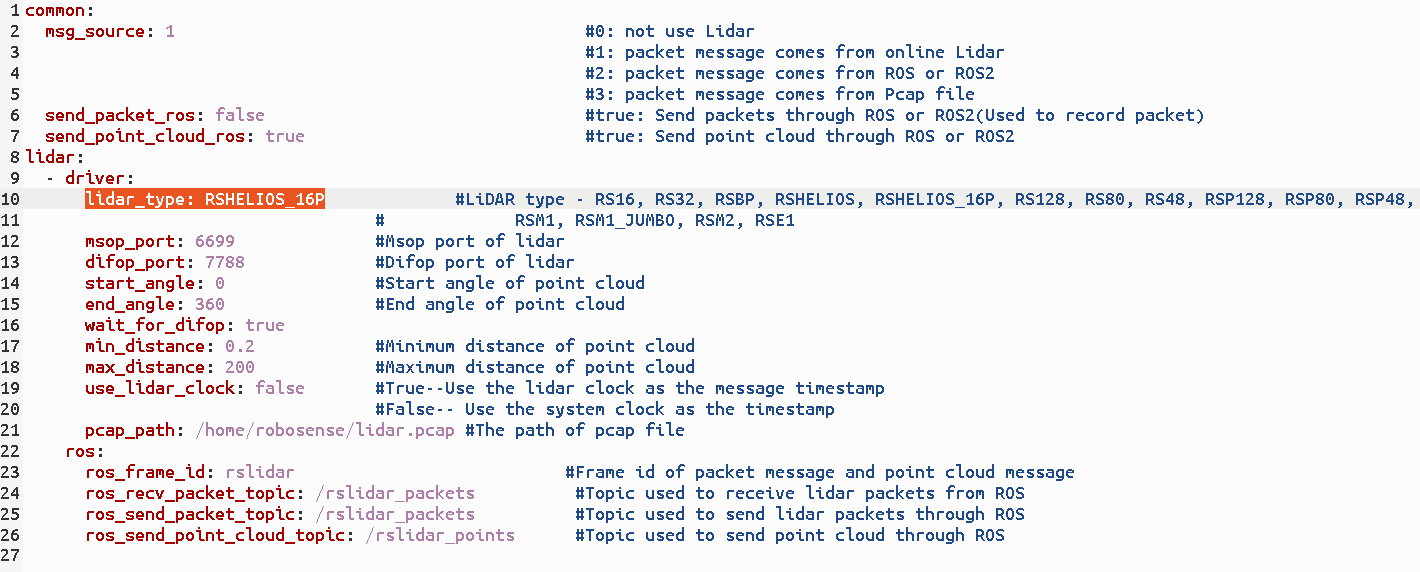 在上述高亮地方,把雷达类型改成你自己的就行了,这个文件里只有这一个地方需要改,其他的不用改。
在上述高亮地方,把雷达类型改成你自己的就行了,这个文件里只有这一个地方需要改,其他的不用改。
5.接着使用rviz可视化工具,查看点云数据,终端开启rviz即可
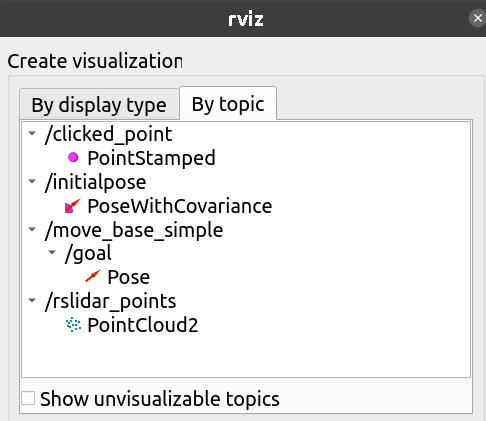
$ rviz接着把速腾雷达的点云话题,添加到可视化列表里,左下角点击“Add”, 在弹出的对话框中可以看到rslidar_points选择“PointCloud2”
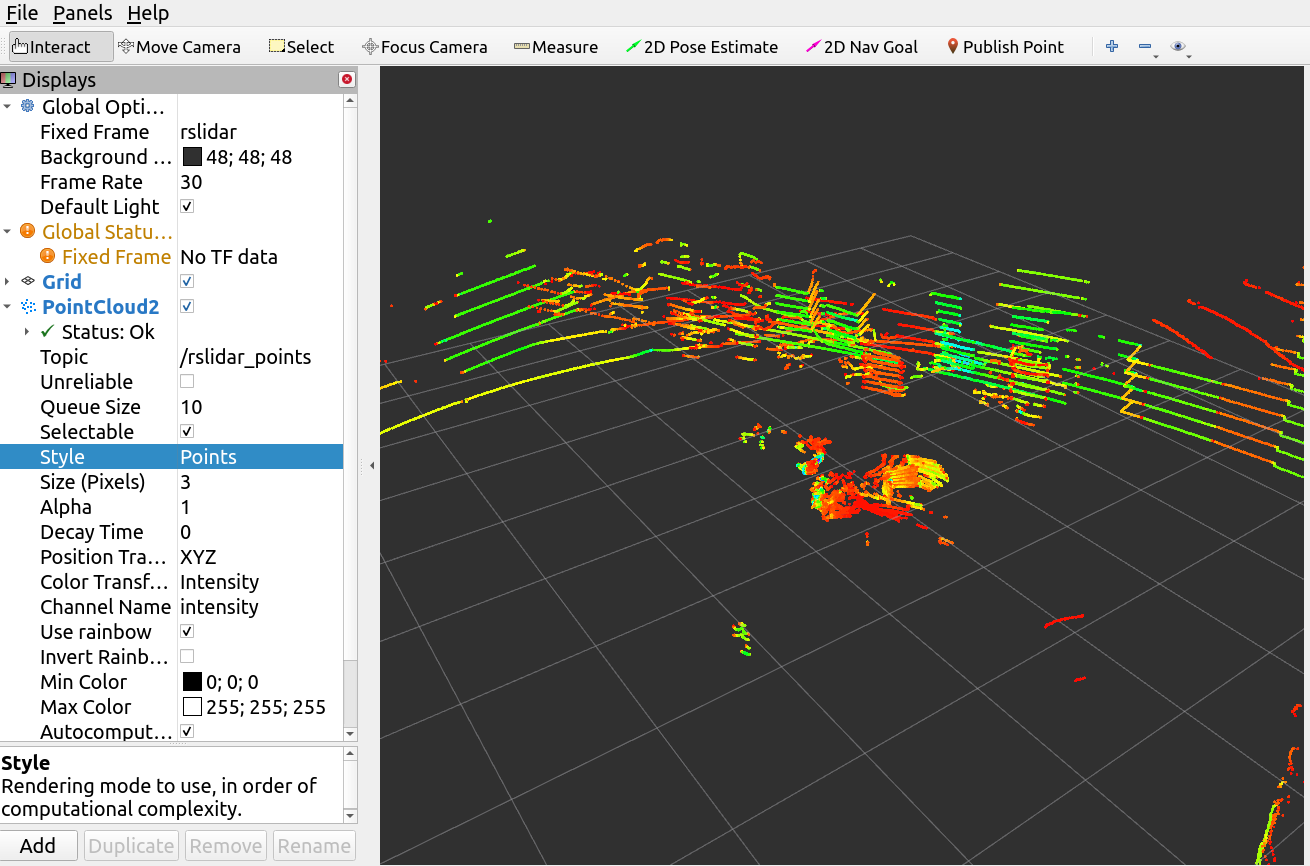
接着在左侧的选项里,把"Fixed Frame"改成“rslidar”; 把“Style”改成“Points”即可。
FAQ:
1.假如你启动sdk后,一直出现“ERRCODE_MSOPTIMEOUT”,而且更改雷达的类型后一直无效。重启计算机
我之前在ubuntu18.04+ROS-melodic上编译的时候,这个问题反复出现。重启之后,问题就消失了。


![[Juc进阶]Callable、Future和FutureTask](https://img-blog.csdnimg.cn/img_convert/c6015c96c94dd7e364ac22bdbda4e5a1.png)