文章和代码已经归档至【Github仓库:https://github.com/timerring/dive-into-AI 】或者公众号【AIShareLab】回复 pytorch教程 也可获取。
文章目录
- Pytorch:权值初始化
- 梯度消失与梯度爆炸
- Xavier 方法与 Kaiming 方法
- Xavier 方法
- nn.init.calculate_gain()
- Kaiming 方法
- 常用初始化方法
Pytorch:权值初始化
在搭建好网络模型之后,首先需要对网络模型中的权值进行初始化。权值初始化的作用有很多,通常,一个好的权值初始化将会加快模型的收敛,而比较差的权值初始化将会引发梯度爆炸或者梯度消失。下面将具体解释其中的原因:
梯度消失与梯度爆炸
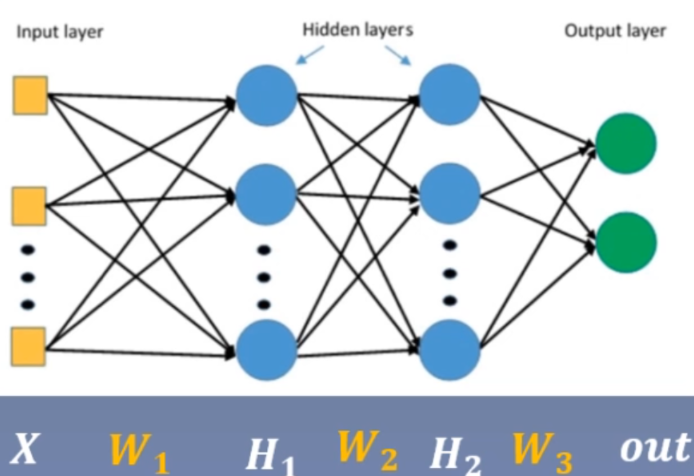
考虑一个 3 层的全连接网络。
H 1 = X × W 1 H_{1}=X \times W_{1} H1=X×W1, H 2 = H 1 × W 2 H_{2}=H_{1} \times W_{2} H2=H1×W2, O u t = H 2 × W 3 Out=H_{2} \times W_{3} Out=H2×W3,如下图所示,
其中第 2 层的权重梯度如下:
H 2 = H 1 ∗ W 2 Δ W 2 = ∂ Loss ∂ W 2 = ∂ L o s s ∂ out ∗ ∂ out ∂ H 2 ∗ ∂ H 2 ∂ W 2 = ∂ Loss ∂ out ∗ ∂ out ∂ H 2 ∗ H 1 \begin{array}{l} \mathrm{H}_{2}=\mathrm{H}_{1} * \mathrm{~W}_{\mathbf{2}} \\ \Delta \mathrm{W}_{\mathbf{2}}=\frac{\partial \text { Loss }}{\partial \mathrm{W}_{2}}=\frac{\partial \mathrm{Loss}}{\partial \text { out }} * \frac{\partial \text { out }}{\partial \mathrm{H}_{2}} * \frac{\partial \mathrm{H}_{2}}{\partial \mathrm{W}_{2}} \\ =\frac{\partial \text { Loss }}{\partial \text { out }} * \frac{\partial \text { out }}{\partial \mathrm{H}_{2}} * \mathrm{H}_{1} \\ \end{array} H2=H1∗ W2ΔW2=∂W2∂ Loss =∂ out ∂Loss∗∂H2∂ out ∗∂W2∂H2=∂ out ∂ Loss ∗∂H2∂ out ∗H1
由上式化简可知,如果H_1发生以下变化,那么对应的梯度也就会发生变化:
- 梯度消失: H 1 → 0 ⇒ Δ W 2 → 0 \mathrm{H}_{1} \rightarrow 0 \Rightarrow \Delta \mathrm{W}_{2} \rightarrow 0 H1→0⇒ΔW2→0
- 梯度爆炸: $\mathrm{H}{1} \rightarrow \infty \Rightarrow \Delta \mathrm{W}{2} \rightarrow \infty $
因此,为了避免以上两种情况,就必须严格控制网络层输出的数值范围。
具体可以通过构建 100 层全连接网络,先不使用非线性激活函数,每层的权重初始化为服从 N ( 0 , 1 ) N(0,1) N(0,1) 的正态分布,输出数据使用随机初始化的数据,这样的例子来直观地感受影响:
import torch
import torch.nn as nn
from common_tools import set_seed
set_seed(1) # 设置随机种子
class MLP(nn.Module):
def __init__(self, neural_num, layers):
super(MLP, self).__init__()
self.linears = nn.ModuleList([nn.Linear(neural_num, neural_num, bias=False) for i in range(layers)])
self.neural_num = neural_num
def forward(self, x):
for (i, linear) in enumerate(self.linears):
x = linear(x)
return x
def initialize(self):
for m in self.modules():
# 判断这一层是否为线性层,如果为线性层则初始化权值
if isinstance(m, nn.Linear):
nn.init.normal_(m.weight.data) # normal: mean=0, std=1
# 网络的层数
layer_nums = 100
# 神经元的个数
neural_nums = 256
batch_size = 16
net = MLP(neural_nums, layer_nums)
net.initialize()
# 设置随机初始化的输入
inputs = torch.randn((batch_size, neural_nums)) # normal: mean=0, std=1
output = net(inputs)
print(output)
输出为:
tensor([[nan, nan, nan, ..., nan, nan, nan],
[nan, nan, nan, ..., nan, nan, nan],
[nan, nan, nan, ..., nan, nan, nan],
...,
[nan, nan, nan, ..., nan, nan, nan],
[nan, nan, nan, ..., nan, nan, nan],
[nan, nan, nan, ..., nan, nan, nan]], grad_fn=<MmBackward>)
通过输出可知,输出值均为nan,即非数字类型,原因可能是数据太大(梯度爆炸)或者太小(梯度消失)。
为了具体知道是在哪一层开始出现nan的,我们可以在forward函数中添加判断得知,查看每一次前向转播的标准差是否是nan,若是,则停止前向传播并输出。
这里判断是否为nan时采用了 torch.isnan 函数
def forward(self, x):
for (i, linear) in enumerate(self.linears):
x = linear(x)
print("layer:{}, std:{}".format(i, x.std()))
if torch.isnan(x.std()):
print("output is nan in {} layers".format(i))
break
return x
输出如下:
layer:0, std:15.959932327270508
layer:1, std:256.6237487792969
layer:2, std:4107.24560546875
.
.
.
layer:29, std:1.322983152787379e+36
layer:30, std:2.0786820453988485e+37
layer:31, std:nan
output is nan in 31 layers
可见,之际上输出的标准差是逐层递增的,具体为什么会导致这种情况:
- E ( X × Y ) = E ( X ) × E ( Y ) E(X \times Y)=E(X) \times E(Y) E(X×Y)=E(X)×E(Y):两个相互独立的随机变量的乘积的期望等于它们的期望的乘积。
- D ( X ) = E ( X 2 ) − [ E ( X ) ] 2 D(X)=E(X^{2}) - [E(X)]^{2} D(X)=E(X2)−[E(X)]2:一个随机变量的方差等于它的平方的期望减去期望的平方
- D ( X + Y ) = D ( X ) + D ( Y ) D(X+Y)=D(X)+D(Y) D(X+Y)=D(X)+D(Y):两个相互独立的随机变量之和的方差等于它们的方差的和。
可以推导出两个随机变量的乘积的方差如下:
D ( X × Y ) = E [ ( X Y ) 2 ] − [ E ( X Y ) ] 2 = D ( X ) × D ( Y ) + D ( X ) × [ E ( Y ) ] 2 + D ( Y ) × [ E ( X ) ] 2 D(X \times Y)=E[(XY)^{2}] - [E(XY)]^{2}=D(X) \times D(Y) + D(X) \times [E(Y)]^{2} + D(Y) \times [E(X)]^{2} D(X×Y)=E[(XY)2]−[E(XY)]2=D(X)×D(Y)+D(X)×[E(Y)]2+D(Y)×[E(X)]2
又由于输入变量是符合标准的正态分布的,因此 E ( X ) = 0 E(X)=0 E(X)=0, E ( Y ) = 0 E(Y)=0 E(Y)=0,可知 D ( X × Y ) = D ( X ) × D ( Y ) D(X \times Y)=D(X) \times D(Y) D(X×Y)=D(X)×D(Y)
我们以输入层第一个神经元为例:
H 11 = ∑ i = 0 n X i ∗ W 1 i \mathrm{H}_{11}=\sum_{i=0}^{n} X_{i} * W_{1 i} H11=∑i=0nXi∗W1i
其中输入 X 和权值 W 都是服从 N ( 0 , 1 ) N(0,1) N(0,1) 的正态分布,且由公式 D ( X × Y ) = D ( X ) × D ( Y ) D(X \times Y)=D(X) \times D(Y) D(X×Y)=D(X)×D(Y), 因此这个神经元的方差为:
D ( H 11 ) = ∑ i = 0 n D ( X i ) ∗ D ( W 1 i ) = n ∗ ( 1 ∗ 1 ) = n \begin{aligned} \mathbf{D}\left(\mathrm{H}_{11}\right) &=\sum_{i=0}^{n} D\left(X_{i}\right) * D\left(W_{1 i}\right) \\ &=n *(1 * 1) \\ &=n \end{aligned} D(H11)=i=0∑nD(Xi)∗D(W1i)=n∗(1∗1)=n
可以求其标准差: std ( H 11 ) = D ( H 11 ) = n \operatorname{std}\left(\mathrm{H}_{11}\right)=\sqrt{\mathrm{D}\left(\mathrm{H}_{11}\right)}=\sqrt{n} std(H11)=D(H11)=n
可见,经过第一层网络,方差就会扩大 n 倍,标准差就扩大 n \sqrt{n} n 倍,n 为每层神经元个数,直到超出数值表示范围。
从前面的输出中也可以看出来,n = 256,因此每一层的标准差输出都是16倍。再由公式可知,每一层网络输出的方差与神经元个数、输入数据的方差、权值方差有关(见上式),通过观察可知,比较好改变的是权值的方差
D
(
W
)
D(W)
D(W),要控制每一层输出的方差仍然为1左右,因此需要
D
(
W
)
=
1
n
D(W)= \frac{1}{n}
D(W)=n1,可知标准差为
s
t
d
(
W
)
=
1
n
std(W)=\sqrt\frac{1}{n}
std(W)=n1。因此修改权值初始化代码为nn.init.normal_(m.weight.data, std=np.sqrt(1/self.neural_num))
再次输出时,结果如下:
layer:0, std:0.9974957704544067
layer:1, std:1.0024365186691284
layer:2, std:1.002745509147644
.
.
.
layer:94, std:1.031973123550415
layer:95, std:1.0413124561309814
layer:96, std:1.0817031860351562
修改之后,没有出现梯度消失或者梯度爆炸的情况,每层神经元输出的方差均在 1 左右。通过恰当的权值初始化,可以保持权值在更新过程中维持在一定范围之内。
但是上述的实验前提为未使用非线性函数的前提下,如果在forward()中添加非线性变换例如tanh,每一层的输出方差会越来越小,会导致梯度消失。
为了解决这个问题,进一步有了著名的 Xavier 初始化与 Kaiming 初始化。
Xavier 方法与 Kaiming 方法
Xavier 方法
Xavier 是 2010 年提出的,针对有非线性激活函数时的权值初始化方法。
- 目标是保持数据的方差维持在 1 左右
- 针对饱和激活函数如 sigmoid 和 tanh 等。
同时考虑前向传播和反向传播,需要满足两个等式
n i ∗ D ( W ) = 1 n i + 1 ∗ D ( W ) = 1 \begin{array}{l} \boldsymbol{n}_{\boldsymbol{i}} * \boldsymbol{D}(\boldsymbol{W})=\mathbf{1} \\ \boldsymbol{n}_{\boldsymbol{i}+\mathbf{1}} * \boldsymbol{D}(\boldsymbol{W})=\mathbf{1} \\ \end{array} ni∗D(W)=1ni+1∗D(W)=1
通过计算可知: D ( W ) = 2 n i + n i + 1 D(W)=\frac{2}{n_{i}+n_{i+1}} D(W)=ni+ni+12。
为了使 Xavier 方法初始化的权值服从均匀分布,假设 W W W 服从均匀分布 U [ − a , a ] U[-a, a] U[−a,a],那么方差 D ( W ) = ( − a − a ) 2 12 = ( 2 a ) 2 12 = a 2 3 D(W)=\frac{(-a-a)^{2}}{12}=\frac{(2 a){2}}{12}=\frac{a{2}}{3} D(W)=12(−a−a)2=12(2a)2=3a2,令 2 n i + n i + 1 = a 2 3 \frac{2}{n_{i}+n_{i+1}}=\frac{a^{2}}{3} ni+ni+12=3a2,解得: a = 6 n i + n i + 1 \boldsymbol{a}=\frac{\sqrt{6}}{\sqrt{n_{i}+n_{i+1}}} a=ni+ni+16,所以 W W W 服从分布 U [ − 6 n i + n i + 1 , 6 n i + n i + 1 ] U\left[-\frac{\sqrt{6}}{\sqrt{n_{i}+n_{i+1}}}, \frac{\sqrt{6}}{\sqrt{n_{i}+n_{i+1}}}\right] U[−ni+ni+16,ni+ni+16]
所以初始化方法改为:
a = np.sqrt(6 / (self.neural_num + self.neural_num))
# 把 a 变换到 tanh,计算增益
tanh_gain = nn.init.calculate_gain('tanh')
a *= tanh_gain
nn.init.uniform_(m.weight.data, -a, a)
并且每一层的激活函数都使用 tanh,输出如下:
layer:0, std:0.7571136355400085
layer:1, std:0.6924336552619934
layer:2, std:0.6677976846694946
.
.
.
layer:97, std:0.6426210403442383
layer:98, std:0.6407480835914612
layer:99, std:0.6442216038703918
可以看到每层输出的方差都维持在 0.6 左右。
也可以直接调用PyTorch 中 Xavier 初始化方法:
tanh_gain = nn.init.calculate_gain('tanh')
nn.init.xavier_uniform_(m.weight.data, gain=tanh_gain)
nn.init.calculate_gain()
这里重点介绍一下nn.init.calculate_gain(nonlinearity,param=**None**)方法。
主要功能是经过一个分布的方差经过激活函数后的变化尺度,主要有两个参数:
- nonlinearity:激活函数名称
- param:激活函数的参数,如 Leaky ReLU 的 negative_slop等等。
下面是计算标准差经过激活函数的变化尺度的代码。
x = torch.randn(10000)
out = torch.tanh(x)
# 计算变化尺度(也可以称为变化倍数)
gain = x.std() / out.std()
print('gain:{}'.format(gain))
tanh_gain = nn.init.calculate_gain('tanh')
print('tanh_gain in PyTorch:', tanh_gain)
输出如下:
gain:1.5982500314712524
tanh_gain in PyTorch: 1.6666666666666667
结果表示,原有数据分布的方差经过 tanh 之后,标准差会变小 1.6 倍左右。
Kaiming 方法
虽然 Xavier 方法提出了针对饱和激活函数的权值初始化方法,但是 AlexNet 出现后,大量网络开始使用非饱和的激活函数如 ReLU 等,这时 Xavier 方法不再适用。2015 年针对 ReLU 及其变种等激活函数提出了 Kaiming 初始化方法。
针对 ReLU,方差应该满足: D ( W ) = 2 n i \mathrm{D}(W)=\frac{2}{n_{i}} D(W)=ni2;
针对 ReLu 的变种,方差应该满足: D ( W ) = 2 ( 1 + a 2 ) ∗ n i D(W)=\frac{2}{\left(1+\mathrm{a}^{2}\right) * n_{i}} D(W)=(1+a2)∗ni2,a 表示负半轴的斜率,如 PReLU 方法,标准差满足 std ( W ) = 2 ( 1 + a 2 ) ∗ n i \operatorname{std}(W)=\sqrt{\frac{2}{\left(1+a^{2}\right) * n_{i}}} std(W)=(1+a2)∗ni2。
代码如下:nn.init.normal_(m.weight.data, std=np.sqrt(2 / self.neural_num)),或者使用 PyTorch 提供的初始化方法:nn.init.kaiming_normal_(m.weight.data)。
常用初始化方法
PyTorch 中提供了 10 中初始化方法
- Xavier 均匀分布
- Xavier 正态分布
- Kaiming 均匀分布
- Kaiming 正态分布
- 均匀分布
- 正态分布
- 常数分布
- 正交矩阵初始化
- 单位矩阵初始化
- 稀疏矩阵初始化
综上, 常用初始化的目标就是要保证每一层输出的方差不能太大,也不能太小,维持在一个稳定的范围内。