目录
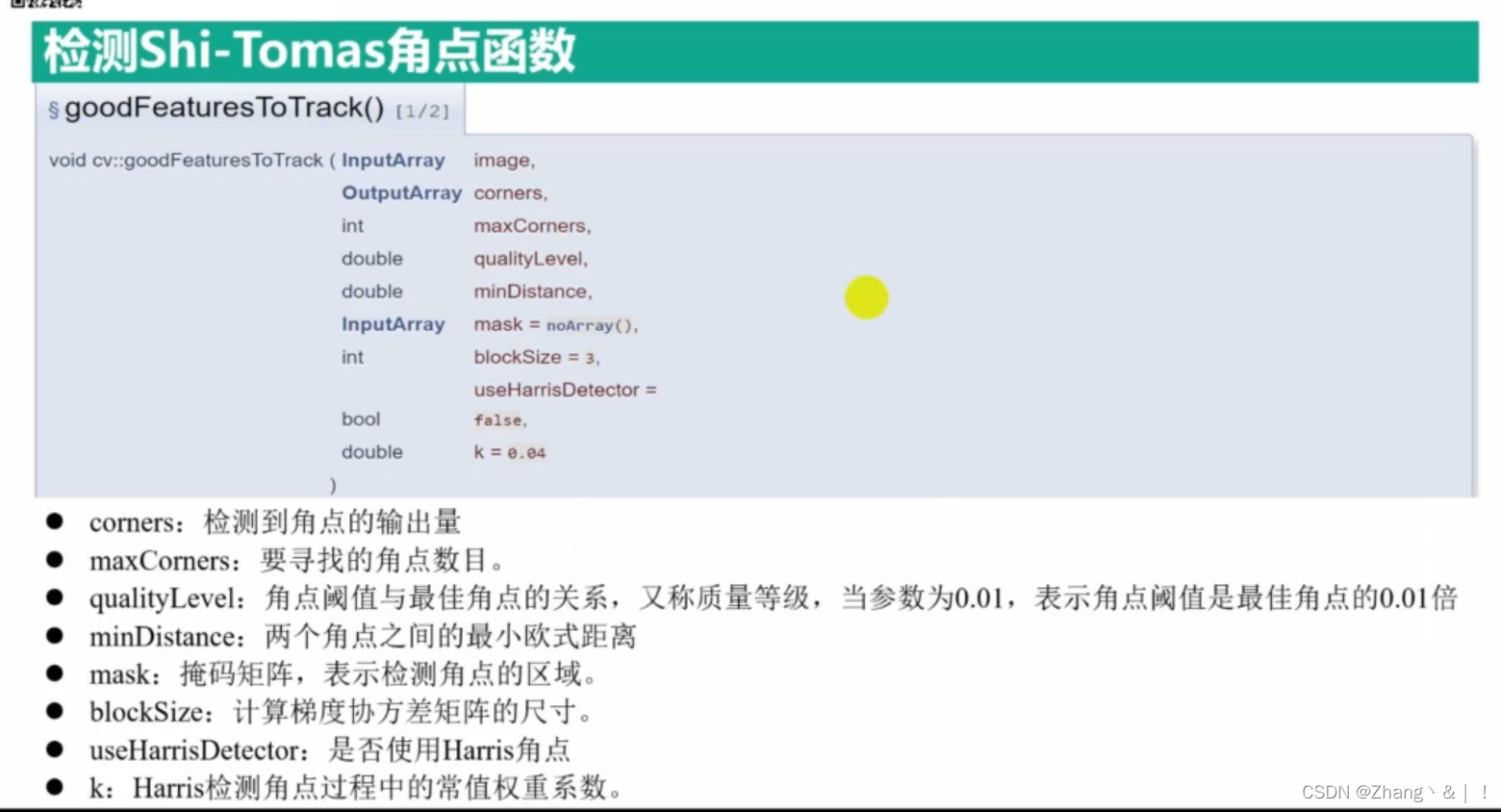
1、Shi-Tomas角点检测
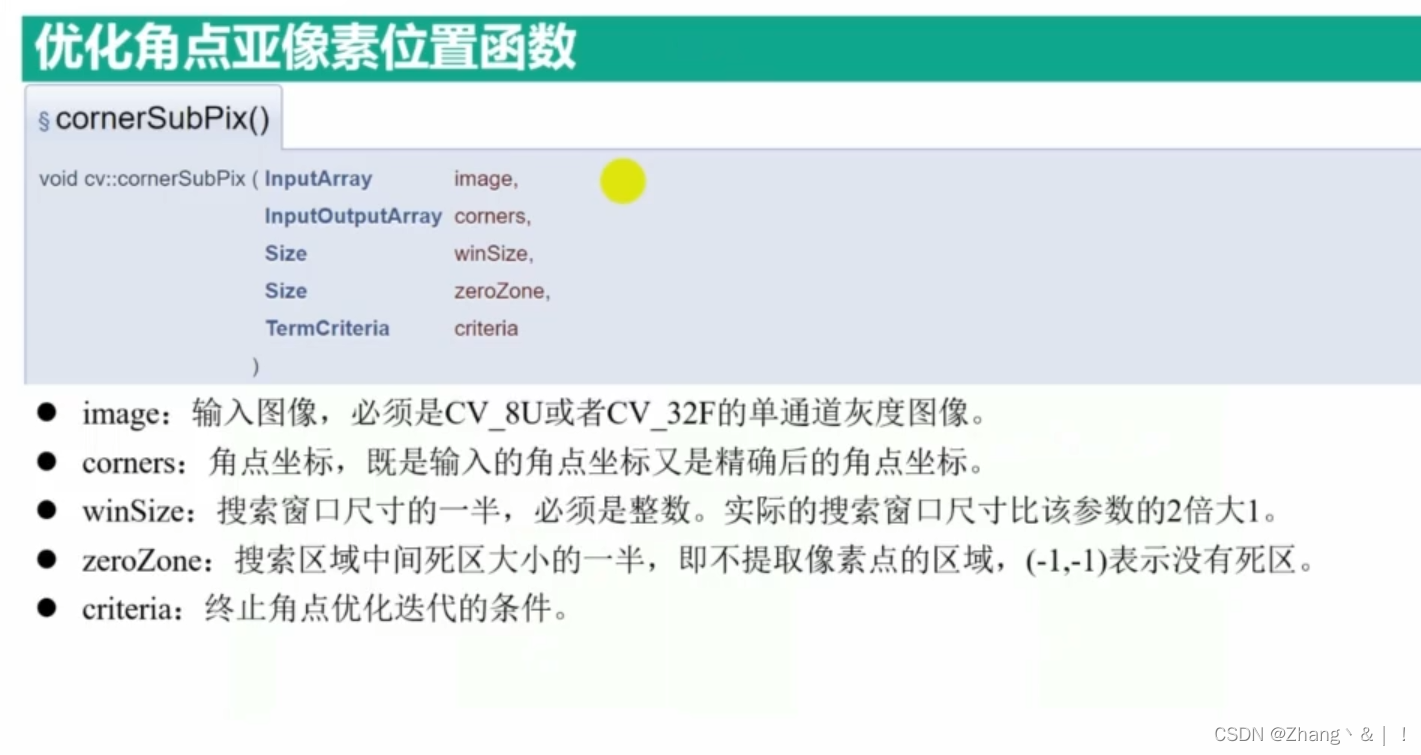
2、亚像素级别角点位置优化
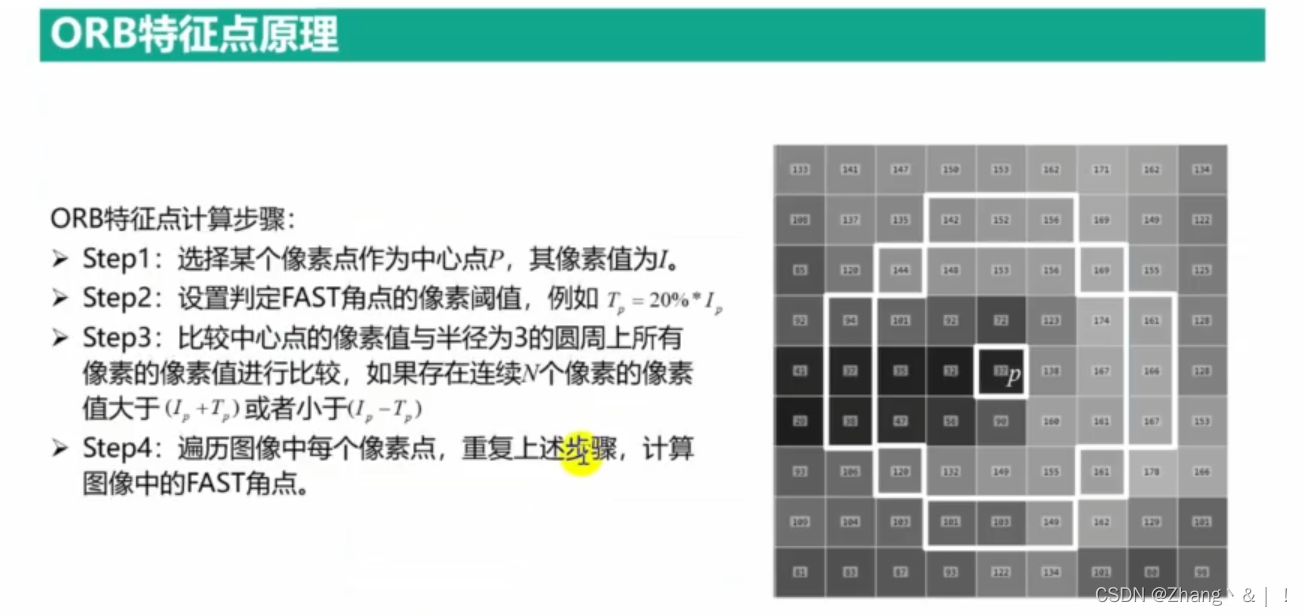
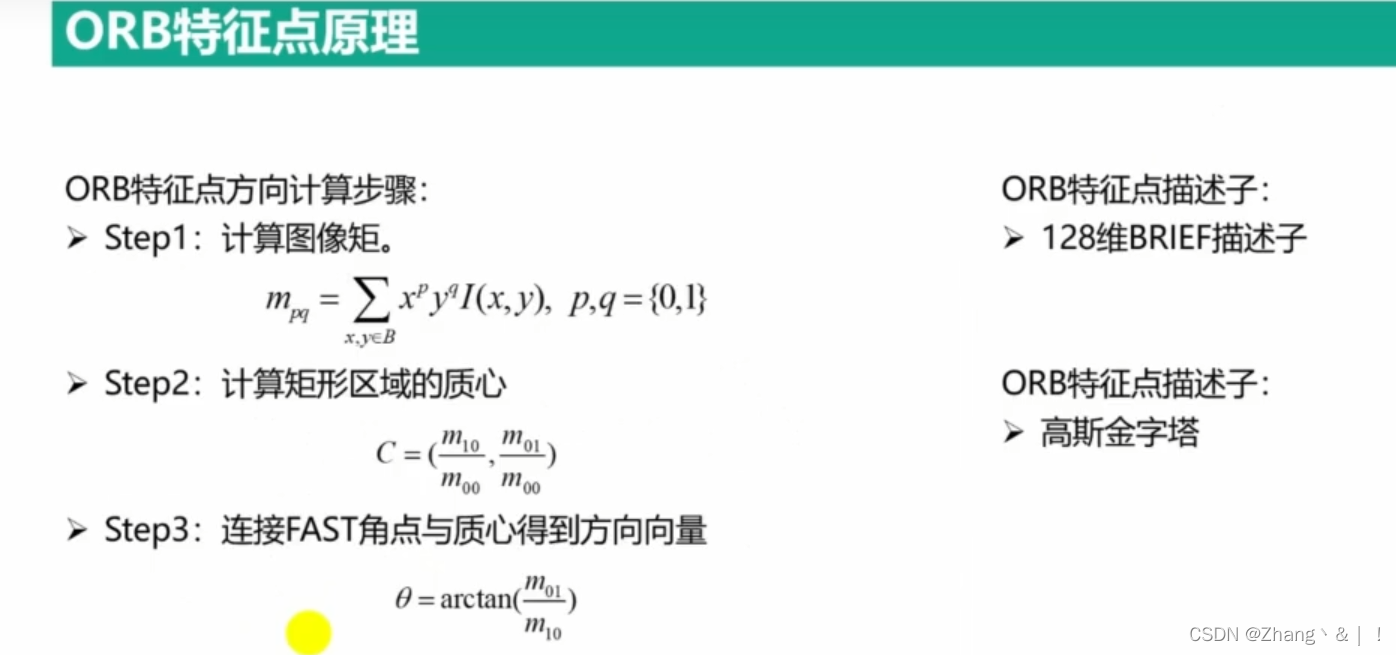
3、ORB特征点
4、特征点匹配
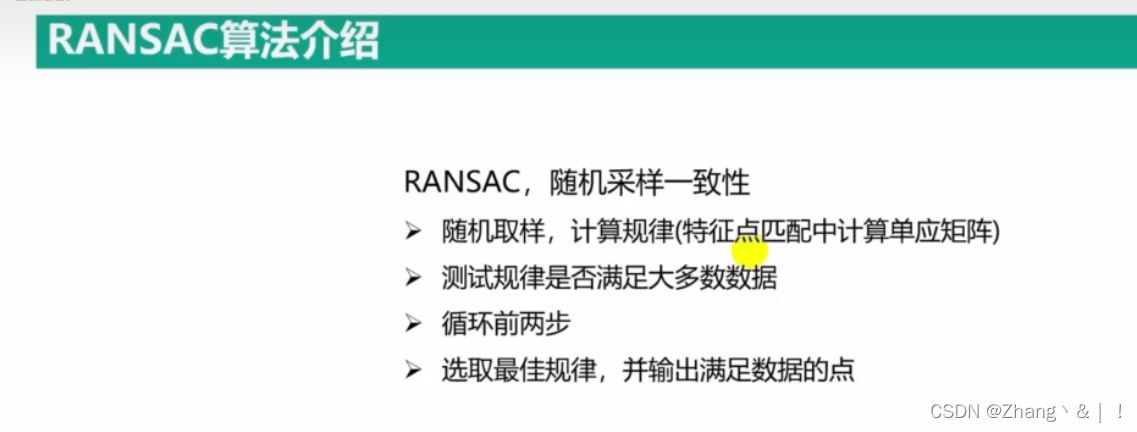
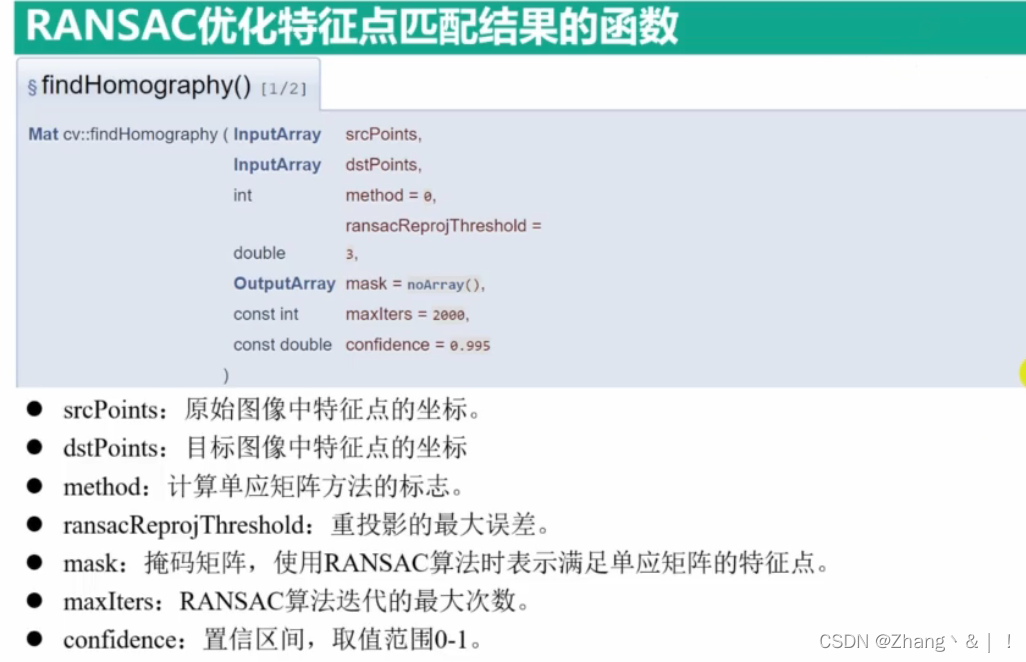
5、RANSAC优化特征点匹配
6、相机模型与投影
1、Shi-Tomas角点检测
//Shi-Tomas角点检测
int test1()
{
Mat img = imread("F:/testMap/lena.png");
if (!img.data)
{
cout << "读取图像错误, 请确认图像文件是否正确" << endl;
return -1;
}
Mat gray;
cvtColor(img, gray,COLOR_BGR2GRAY);
//Detector parametersl
//提取角点
int maxCorners = 100;//检测角点数目
double quality_level = 0.01;//质量等级,或者说阈值与最佳角点的比例关系
double minDistance = 0.04;//两个角点之间的最小欧式距离
vector<Point2f> corners;
goodFeaturesToTrack(gray,corners,maxCorners,quality_level, minDistance,Mat(),3,false);
//绘制角点
vector<KeyPoint> keyPoints;//存放角点的KeyPoint类,用于后期绘制角点时用
for (int i = 0; i < corners.size(); i++)
{
//将角点存放在KeyPoint类中
KeyPoint keyPoint;
keyPoint.pt = corners[i];
keyPoints.push_back(keyPoint);
}
//用drawKeypoints()函数绘制角点坐标
drawKeypoints(img, keyPoints, img);
imshow("角点结果", img);
waitKey(0);
return 0;
}2、亚像素级别角点位置优化

//亚像素级别角点位置优化
int test2()
{
system("color 02");//改变DOS界面颜色
Mat img = imread("F:/testMap/lena.png", IMREAD_COLOR);
if (!img.data)
{
cout << "读取图像错误,请确认图像文件是否正确" << endl;
return -1;
}
//彩色图像转成灰度图像
Mat gray;
cvtColor(img, gray, COLOR_BGR2GRAY);
//提取角点
int maxCorners = 100;//检测角点数目
double quality_level = 0.01;//质量等级,或者说阈值与最佳角点的比例关系
double minDistance = 0.04;//两个角点之间的最小欧式距离
vector<Point2f> corners;
goodFeaturesToTrack(gray, corners, maxCorners, quality_level, minDistance, Mat(), 3, false);
//计算亚像素级别角点坐标
vector<Point2f> cornersSub = corners;//角点备份,防止被函数修改
Size winSize = Size(5, 5);
Size zeroZone = Size(-1, -1);
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 40, 0.001);
cornerSubPix(gray, cornersSub, winSize, zeroZone, criteria);
//输出初始坐标和精细坐标
for (size_t i = 0; i < corners.size(); i++)
{
string str = to_string(i);
str = "第" + str + "个角点点初始坐标:";
cout << str << corners[i] << "精细后坐标:" << cornersSub[i] << endl;
}
waitKey(0);
return 0;
}3、ORB特征点

//ORB特征点
int test3()
{
Mat img = imread("F:/testMap/lena.png");
if (!img.data)
{
cout << "请确认图像文件名称是否正确" << endl;
return -1;
}
//创建ORB特征点类变量
Ptr<ORB> orb = ORB::create(500,//特征点数目
1.2f,//金字塔层级之间的缩放比例
8,//金字塔图像层数系数
31,//边缘阈值
0,//原图在金字塔中的层数
2,//生成描述子时需要用的像素点数目
ORB::HARRIS_SCORE,//使用 Harris方法评价特征点
31,//生成描述子时关键点周围邻域的尺寸
20//计算 FAST角点时像素值差值的阈值
);
//计算ORB关键点
vector<KeyPoint> Keypoints;
orb->detect(img, Keypoints);//确定关键点
//计算ORB描述子
Mat descriptions;
orb->compute(img, Keypoints, descriptions);//计算描述子
//绘制特征点
Mat imgAngel;
img.copyTo(imgAngel);
//绘制不含角度和大小的结果
drawKeypoints(img, Keypoints, img, Scalar(255, 255, 255));//绘制含有角度和大小的结果
drawKeypoints(img, Keypoints, imgAngel, Scalar(255, 255, 255), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
//显示结果
imshow("不含角度和大小的结果", img);
imshow("含有角度和大小的结果", imgAngel);
waitKey(0);
return 0;
}4、特征点匹配

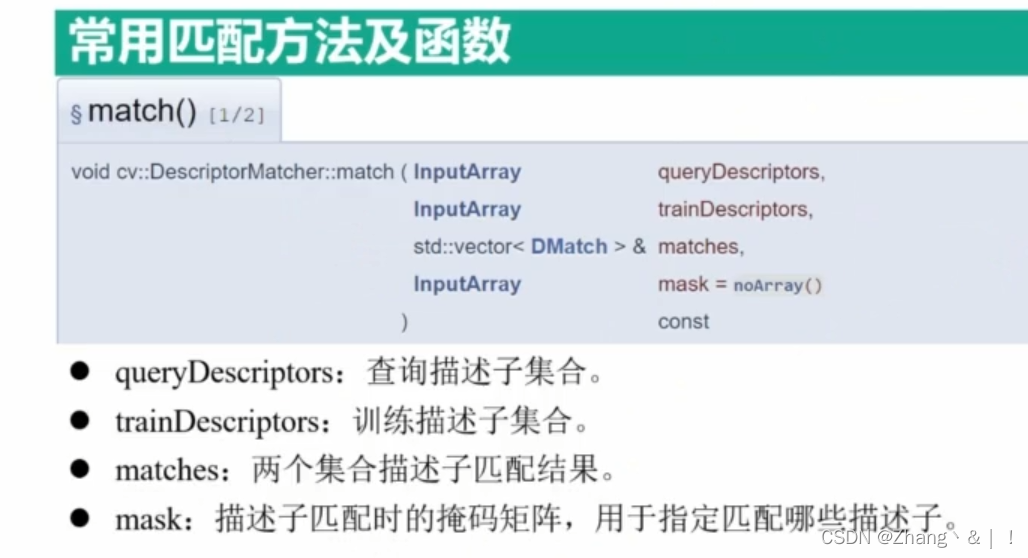


//特征点匹配
void orb_features(Mat &gray,vector<KeyPoint> &keypionts,Mat &descriptions)
{
Ptr<ORB> orb = ORB::create(1000,1.2f);
orb->detect(gray,keypionts);
orb->compute(gray,keypionts,descriptions);
}
int test1()
{
Mat img1, img2;
img1 = imread("F:/testMap/box.png");
img2 = imread("F:/testMap/box_in_scen.png");
if (!(img1.data && img2.dataend))
{
cout << "读取图像错误,请确认图像文件是否正确" << endl;
return -1;
}
//提取ORB特征点
vector<KeyPoint> Keypoints1, Keypoints2;
Mat descriptions1, descriptions2;
//计算特征点
orb_features(img1, Keypoints1, descriptions1);
orb_features(img2, Keypoints2, descriptions2);
//特征点匹配
vector<DMatch> matches;//定义存放匹配结果的变最
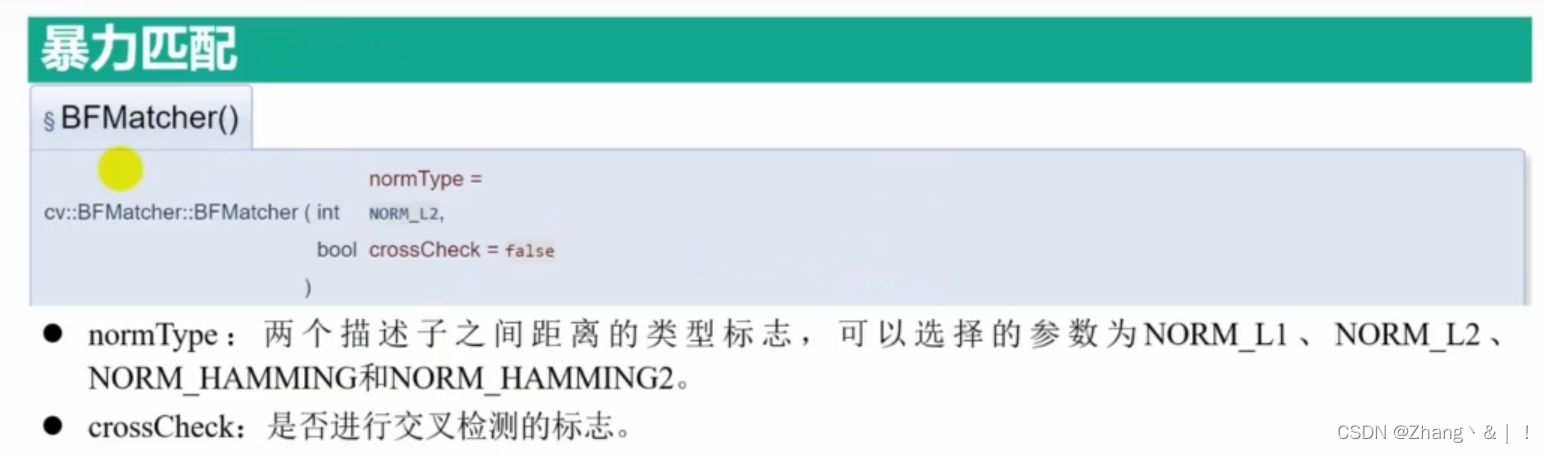
BFMatcher matcher(NORM_HAMMING);//定义特征点匹配的类,使用汉明距离
matcher.match(descriptions1, descriptions2, matches);//进行特征点匹配
cout << "matches=" << matches.size() << endl;//匹配成功特征点数目
//通过汉明距离删选匹配结果
double min_dist = 0, max_dist = 10000;
for (int i = 0; i < matches.size(); i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
//输出所有匹配结果中最大韩明距离和最小汉明距离
cout << "min_dist=" << min_dist << endl;
cout << "max_dist=" << max_dist << endl;
//将汉明距离较大的匹配点对删除
vector<DMatch>good_matches;
for (int i = 0; i < matches.size(); i++)
{
if (matches[i].distance <= max(2 * min_dist, 20.0))
{
good_matches.push_back(matches[i]);
}
}
cout << "good_min=" << good_matches.size() << endl;//剩余特征点数目
//绘制匹配结果
Mat outimg, outimg1;
drawMatches(img1, Keypoints1, img2, Keypoints2, matches, outimg);
drawMatches(img1, Keypoints1, img2, Keypoints2, good_matches, outimg1);
imshow("未筛选结果", outimg);
imshow("最小汉明距离筛选", outimg1);
waitKey(0);
return 0;
}
5、RANSAC优化特征点匹配
void match_min(vector<DMatch> matches, vector<DMatch> & good_matches)//最小汉明距离
{
double min_dist = 10000, max_dist = 0;
for (int i = 0; i < matches.size(); i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
cout << "min_dist=" << min_dist << endl;
cout << "max_dist=" << max_dist << endl;
for (int i = 0; i < matches.size(); i++)
{
if (matches[i].distance <= max(2 * min_dist, 20.0))
{
good_matches.push_back(matches[i]);
}
}
}
//RANSAC算法实现
void ransac(vector<DMatch>matches, vector <KeyPoint> queryifeyPoint, vector<KeyPoint> trainieyPoint, vector<DMatch> &kmatches_ransac)
{
//定义保存匹配点对坐标
vector<Point2f> srcPoints(matches.size()), dstPoints(matches.size());
//保存从关键点中提取到的匹配点对的坐标
for (int i = 0; i < matches.size(); i++)
{
srcPoints[i] = queryifeyPoint[matches[i].queryIdx].pt;
dstPoints[i] = trainieyPoint[matches[i].trainIdx].pt;
}
//匹配点对进行RANSAC过滤
vector<int> inliersMask(srcPoints.size());
// Mat homography;
//homography = findHomography(srcPoints, dstPoints, RANSAC, 5, inliersMask);
findHomography(srcPoints, dstPoints, RANSAC, 5, inliersMask);
//手动的保留RANSAC过滤后的匹配点对
for (int i = 0; i < inliersMask.size(); i++)
{
if (inliersMask[i])
{
kmatches_ransac.push_back(matches[i]);
}
}
}
int test5()
{
Mat img1, img2;
img1 = imread("F:/testMap/box.png");
img2 = imread("F:/testMap/box_in_scen.png");
if (!(img1.data && img2.dataend))
{
cout << "读取图像错误,请确认图像文件是否正确" << endl;
return -1;
}
//提取ORB特征点
vector<KeyPoint> Keypoints1, Keypoints2;
Mat descriptions1, descriptions2;
//计算特征点
orb_features(img1, Keypoints1, descriptions1);
orb_features(img2, Keypoints2, descriptions2);
//特征点匹配
vector<DMatch> matches, good_min, good_ransac;
BFMatcher matcher(NORM_HAMMING);
matcher.match(descriptions1, descriptions2, matches);
cout << "matches=" << matches.size() << endl;
//最小汉明距离
match_min(matches, good_min);
cout << "good_min=" << good_min.size() << endl;
//用ransac算法筛选匹配结果
ransac(good_min, Keypoints1, Keypoints2, good_ransac);
cout << "good_matches.size=" << good_ransac.size() << endl;
//绘制匹配结果
Mat outimg, outimg1, outimg2;
drawMatches(img1,Keypoints1,img2,Keypoints2, matches,outimg);
drawMatches(img1, Keypoints1, img2, Keypoints2, good_min, outimg1);
drawMatches(img1,Keypoints1,img2,Keypoints2, good_ransac,outimg2);
imshow("未筛选结果", outimg);
imshow("最小汉明距离筛选", outimg1) ;
imshow("ransac筛选",outimg2);
waitKey(0);
return 0;
}6、相机模型与投影


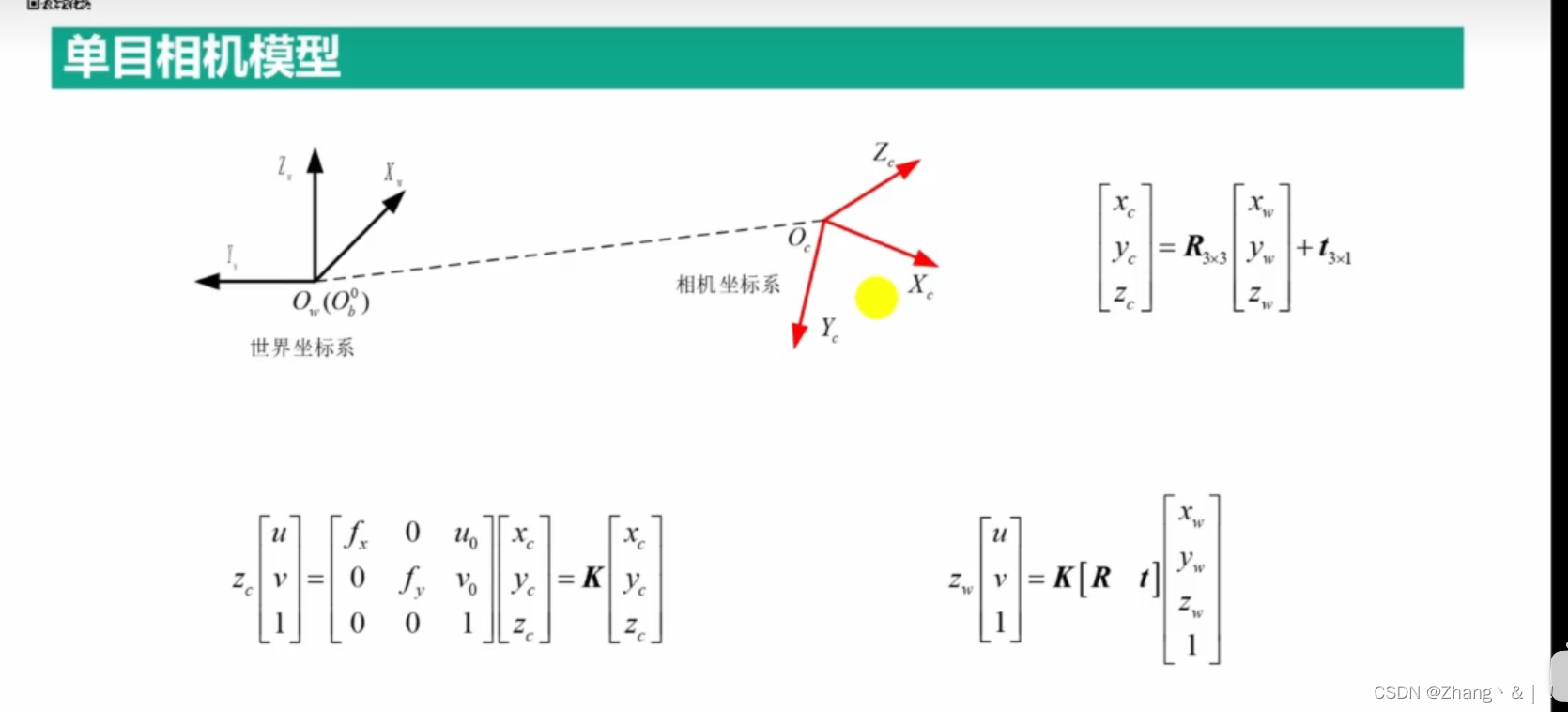
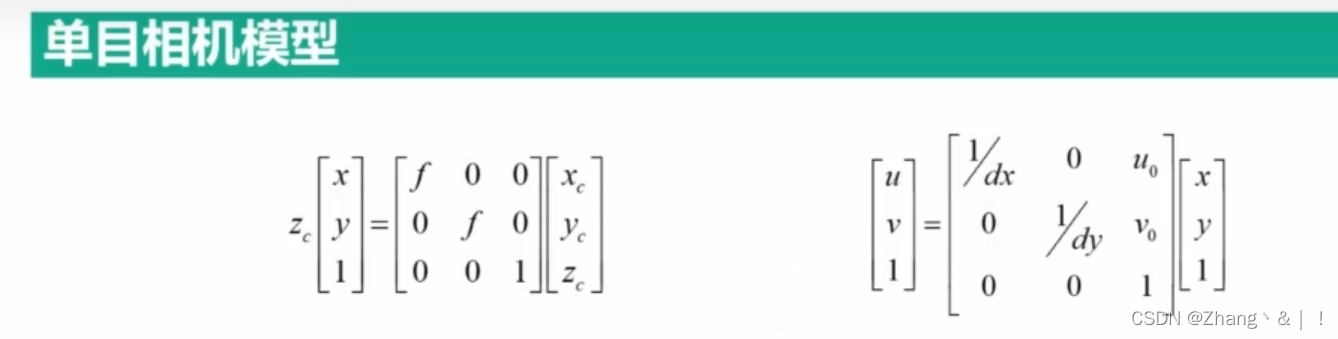
//相机模型与投影
int test4()
{
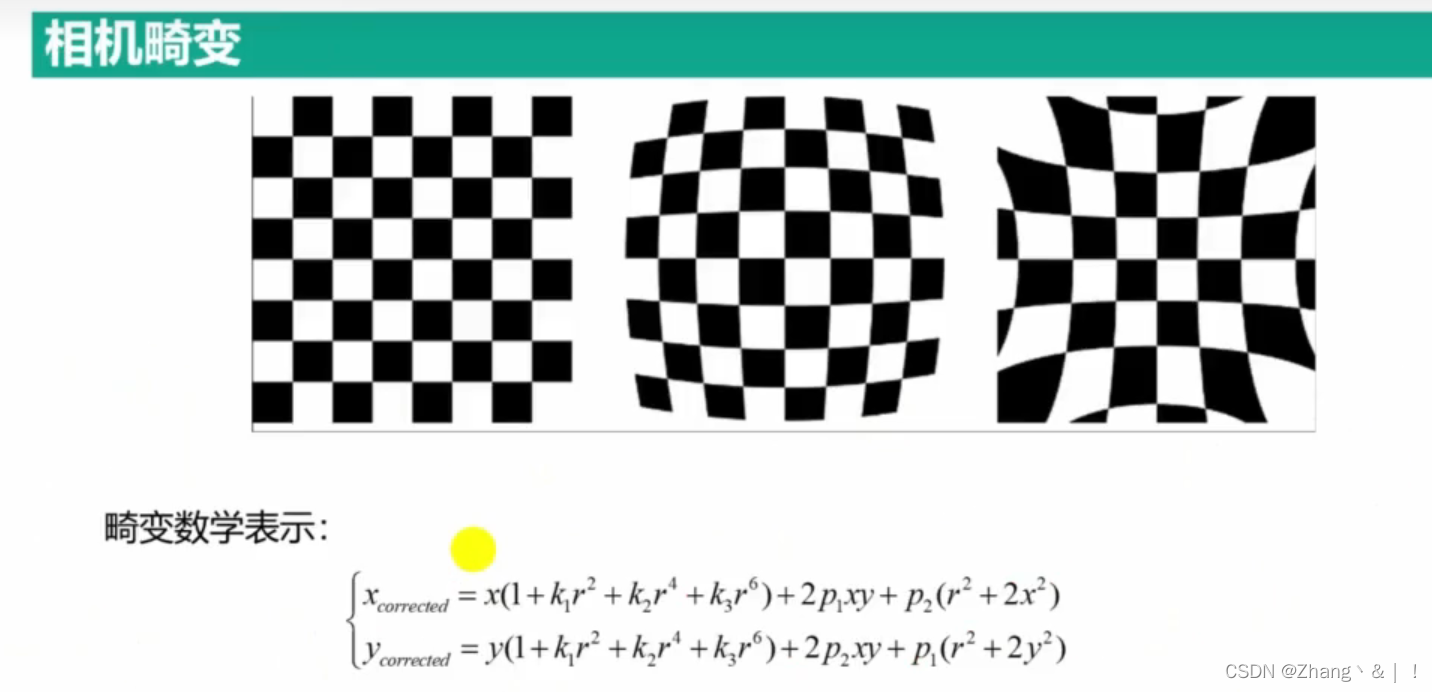
//输入计算得到的内参矩阵和畸变矩阵
Mat cameraMatrix = (Mat_<float>(3,3) << 532.016297,0,332.172519,0,531.565159,233.388075,0, 0,1);
Mat distCoeffs = (Mat_<float>(1,5) << -0.285188,0.080097,0.001274,-0.002415,0.106579);
//代码清单10-10中计算的第一张图像相机坐标系与世界坐标系之间的关系
Mat rvec = (Mat_<float>(1,3)<<-1.977853,-2.002220,0.130029);
Mat tvec = (Mat_<float>(1,3) <<-26.88155,-42.79936,159.19703);
//生成第一张图像中内角点的三维世界坐标
Size boardSize = Size(9, 6);
Size squareSize = Size(10,10);//棋盘格每个方格的真实尺寸
vector<Point3f> PointSets;
for (int j = 0; j < boardSize.height; j++)
{
for (int k = 0; k < boardSize.width; k++)
{
Point3f realPoint;
//假设标定板为世界坐标系的z平面,即z=0
realPoint.x = j*squareSize.width;
realPoint.y = k*squareSize.height;
realPoint.z = 0;
PointSets.push_back(realPoint);
}
}
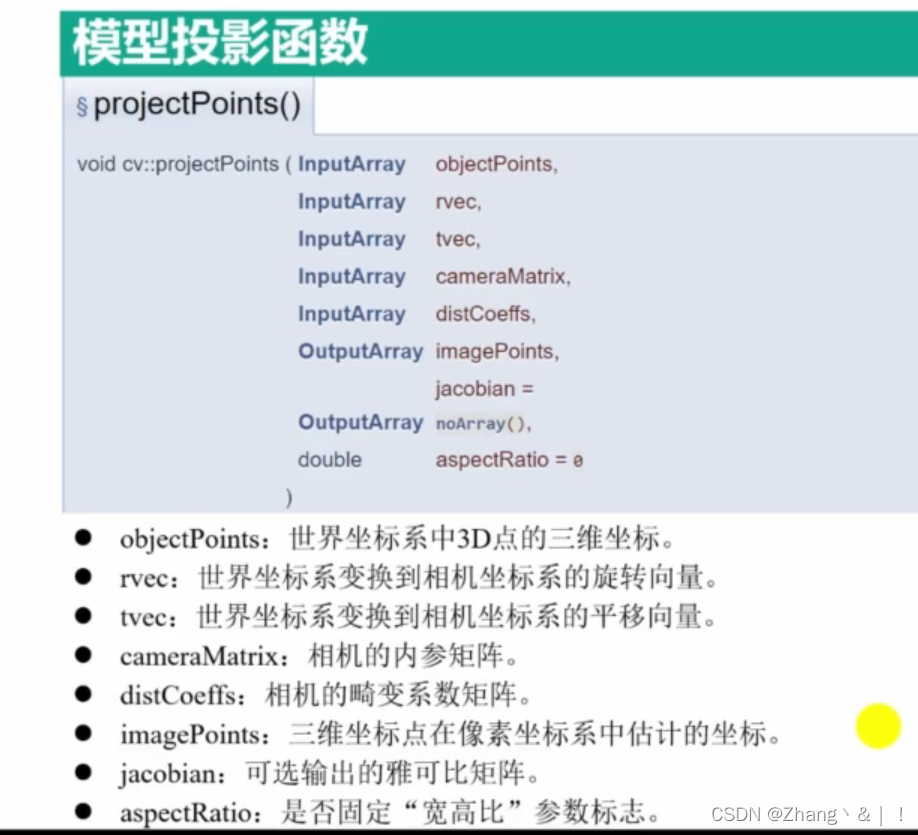
//根据三维坐标和相机与世界坐标系时间的关系估计内角点像素坐标
vector<Point2f>imagePoints;
projectPoints(PointSets,rvec,tvec,cameraMatrix, distCoeffs, imagePoints);
for(int i = 0; i < imagePoints.size(); i++)
{
cout << "第" << to_string(i) << "个点的坐标" << imagePoints[i] << endl;
}
waitKey(0);
return 0;
}