系列文章目录
提示:这里是该系列文章的所有文章的目录
第一章:(一)Qt下实现多个海康工业相机内触发采集回调取流显示
第二章:(二)Qt下多线程实现多个海康工业相机内触发采集回调取流显示
文章目录
- 系列文章目录
- 前言
- 一、环境配置
- 二、图像显示流程
- 三、示例完整代码
- 四、下载链接
- 总结
前言
在我之前所记录的关于海康工业相机的系列文章中 ,讲述的是使用外触发采集模式中的软触发,并采用超时机制获取一帧图片主动取流的,但在后期的测试过程中发现会出现失帧的的情况,所以决定采用内触发采集模式,并使用回调取流的方式来获取图像。本文主要讲述了在Qt下使用回调取流的方式来实现两个相机的显示,并结合相应的示例进行讲解,以便大家学习,如有错误之处,欢迎大家批评指正。
项目效果

提示:以下是本篇文章正文内容,下面案例可供参考
一、环境配置
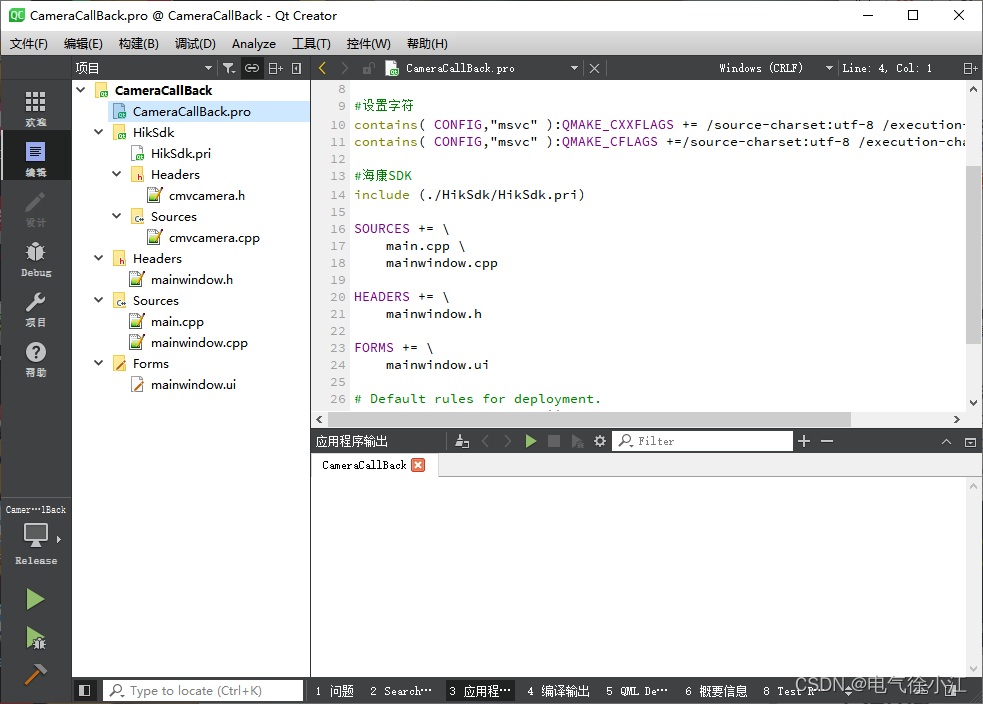
同样的,要在Qt下实现海康工业相机的采集,需要将相关SDK集成到项目中去,这里按照前文使用pri的方式将海康SDK添加到pro项目中去,具体的可查看该篇文章(一)Qt+OpenCV调用海康工业相机SDK示例开发,我的示例项目是MSVC 64位,所以在pro中也是添加了字符的设置:
#设置字符
contains( CONFIG,"msvc" ):QMAKE_CXXFLAGS += /source-charset:utf-8 /execution-charset:utf-8
contains( CONFIG,"msvc" ):QMAKE_CFLAGS +=/source-charset:utf-8 /execution-charset:utf-8
#海康SDK
include (./HikSdk/HikSdk.pri)
示例项目结构如下:
二、图像显示流程
海康工业相机使用回调取流的整个流程如下:
1.枚举所连接的相机信息列表,我这里进行了GIGE和USB类型的相机的枚举
2.可以获取相机序列号来指定相机设备并打开相机
3.使用SetEnumValue(“TriggerMode”,0)关闭外触发模式
4.在开启采集前进行回调函数的注册
5.开启采集,并在回调函数中将图像数据转换为QImage类型并显示到界面
//初始化相机对象,完成开启采集前的流程
void MainWindow::initWidget()
{
//相机对象
for(int i=0;i<2;i++)
{
m_myCamera[i] = new CMvCamera;
}
//枚举子网内所有设备
memset(&m_stDevList,0,sizeof(MV_CC_DEVICE_INFO_LIST));
int nRet = CMvCamera::EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE,&m_stDevList);
if(MV_OK != nRet)
{
LOGDEBUG<<"枚举相机设备失败!";
return;
}
int deviceNum = m_stDevList.nDeviceNum;
LOGDEBUG<<"deviceNum:"<<deviceNum;
for(int i=0;i<deviceNum;i++)
{
MV_CC_DEVICE_INFO *pDeviceInfo = m_stDevList.pDeviceInfo[i];
QString strSerialNumber = "";
if(pDeviceInfo->nTLayerType == MV_GIGE_DEVICE)
{
strSerialNumber = (char*)pDeviceInfo->SpecialInfo.stGigEInfo.chSerialNumber;
}
else if(pDeviceInfo->nTLayerType == MV_USB_DEVICE)
{
strSerialNumber = (char*)pDeviceInfo->SpecialInfo.stUsb3VInfo.chSerialNumber;
}
else
{
LOGDEBUG<<"警告,未知设备枚举!";
return;
}
LOGDEBUG<<"i:"<<i<<" strSerialNumber:"<<strSerialNumber;
//根据相机序列号指定相机对象
//if(strSerialNumber == "DA0333897")
//{
// m_deviceInfo[0] = pDeviceInfo;
//}
//else if(strSerialNumber == "DA0424312")
//{
// m_deviceInfo[1] = pDeviceInfo;
//}
//不指定
m_deviceInfo[i] = pDeviceInfo;
//打开相机
int nRet = m_myCamera[i]->Open(m_deviceInfo[i]);
if(MV_OK != nRet)
{
LOGDEBUG<<"i:"<<i<<"打开相机失败!";
return;
}
//关闭触发模式
nRet = m_myCamera[i]->SetEnumValue("TriggerMode",0);
if(MV_OK != nRet)
{
LOGDEBUG<<"i:"<<i<<"关闭触发模式失败!";
return;
}
//注册回调函数
//nRet = m_myCamera[i]->RegisterImageCallBack(ImageCallback,this); //单色相机
//nRet = m_myCamera[i]->RegisterImageCallBackRGB(ImageCallback_1,this); //彩色相机
//if(MV_OK != nRet)
//{
// LOGDEBUG<<"i:"<<i<<"注册回调函数失败!";
// return;
//}
}
//注册回调函数
nRet = m_myCamera[0]->RegisterImageCallBackRGB(ImageCallback_1,this);
if(MV_OK != nRet)
{
LOGDEBUG<<"相机1注册回调函数失败!";
return;
}
nRet = m_myCamera[1]->RegisterImageCallBackRGB(ImageCallback_2,this);
if(MV_OK != nRet)
{
LOGDEBUG<<"相机2注册回调函数失败!";
return;
}
}
//回调函数1
void __stdcall MainWindow::ImageCallback_1(unsigned char * pData,MV_FRAME_OUT_INFO_EX* pFrameInfo,void* pUser)
{
LOGDEBUG<<QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss:zzz ")<<"回调函数1执行了";
MainWindow* pThis = (MainWindow*)pUser;
QImage showImage = QImage(pData, pFrameInfo->nWidth,pFrameInfo->nHeight,QImage::Format_RGB888);
pThis->showImage(showImage,1);
}
三、示例完整代码
1.HikSdk.pri整个文件夹中有相应的头文件源文件及dll,可直接通过后文的下载链接进行下载,这里对修改的一处进行展示,其它的在这里就不做展示了(也可以在之前的海康系列文章中查看下)
//cmvcamera.h
// ch:注册彩色图像数据回调
int RegisterImageCallBackRGB(void(__stdcall* cbOutput)(unsigned char * pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser);
//cmvcamera.cpp
// ch:注册彩色图像数据回调
int CMvCamera::RegisterImageCallBackRGB(void(__stdcall* cbOutput)(unsigned char * pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser)
{
return MV_CC_RegisterImageCallBackForRGB(m_hDevHandle, cbOutput, pUser);
}
2.mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QMainWindow>
#include <QDateTime>
#include "HikSdk/cmvcamera.h"
QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACE
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
~MainWindow();
void initWidget();
void showImage(QImage showImage,int index);
private slots:
void on_pb_start_clicked();
void on_pb_stop_clicked();
private:
static void __stdcall ImageCallback_1(unsigned char * pData,MV_FRAME_OUT_INFO_EX* pFrameInfo,void* pUser);
static void __stdcall ImageCallback_2(unsigned char * pData,MV_FRAME_OUT_INFO_EX* pFrameInfo,void* pUser);
private:
Ui::MainWindow *ui;
CMvCamera *m_myCamera[2]; //相机对象
MV_CC_DEVICE_INFO *m_deviceInfo[2]; //设备信息
MV_CC_DEVICE_INFO_LIST m_stDevList; //设备信息列表
};
#endif // MAINWINDOW_H
3.mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainWindow)
{
ui->setupUi(this);
this->initWidget();
}
MainWindow::~MainWindow()
{
delete ui;
}
void MainWindow::initWidget()
{
//相机对象
for(int i=0;i<2;i++)
{
m_myCamera[i] = new CMvCamera;
}
//枚举子网内所有设备
memset(&m_stDevList,0,sizeof(MV_CC_DEVICE_INFO_LIST));
int nRet = CMvCamera::EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE,&m_stDevList);
if(MV_OK != nRet)
{
LOGDEBUG<<"枚举相机设备失败!";
return;
}
int deviceNum = m_stDevList.nDeviceNum;
LOGDEBUG<<"deviceNum:"<<deviceNum;
for(int i=0;i<deviceNum;i++)
{
MV_CC_DEVICE_INFO *pDeviceInfo = m_stDevList.pDeviceInfo[i];
QString strSerialNumber = "";
if(pDeviceInfo->nTLayerType == MV_GIGE_DEVICE)
{
strSerialNumber = (char*)pDeviceInfo->SpecialInfo.stGigEInfo.chSerialNumber;
}
else if(pDeviceInfo->nTLayerType == MV_USB_DEVICE)
{
strSerialNumber = (char*)pDeviceInfo->SpecialInfo.stUsb3VInfo.chSerialNumber;
}
else
{
LOGDEBUG<<"警告,未知设备枚举!";
return;
}
LOGDEBUG<<"i:"<<i<<" strSerialNumber:"<<strSerialNumber;
//根据相机序列号指定相机对象
//if(strSerialNumber == "DA0333897")
//{
// m_deviceInfo[0] = pDeviceInfo;
//}
//else if(strSerialNumber == "DA0424312")
//{
// m_deviceInfo[1] = pDeviceInfo;
//}
//不指定
m_deviceInfo[i] = pDeviceInfo;
//打开相机
int nRet = m_myCamera[i]->Open(m_deviceInfo[i]);
if(MV_OK != nRet)
{
LOGDEBUG<<"i:"<<i<<"打开相机失败!";
return;
}
//关闭触发模式
nRet = m_myCamera[i]->SetEnumValue("TriggerMode",0);
if(MV_OK != nRet)
{
LOGDEBUG<<"i:"<<i<<"关闭触发模式失败!";
return;
}
//注册回调函数
//nRet = m_myCamera[i]->RegisterImageCallBack(ImageCallback,this); //单色相机
//nRet = m_myCamera[i]->RegisterImageCallBackRGB(ImageCallback_1,this); //彩色相机
//if(MV_OK != nRet)
//{
// LOGDEBUG<<"i:"<<i<<"注册回调函数失败!";
// return;
//}
}
//注册回调函数
nRet = m_myCamera[0]->RegisterImageCallBackRGB(ImageCallback_1,this);
if(MV_OK != nRet)
{
LOGDEBUG<<"相机1注册回调函数失败!";
return;
}
nRet = m_myCamera[1]->RegisterImageCallBackRGB(ImageCallback_2,this);
if(MV_OK != nRet)
{
LOGDEBUG<<"相机2注册回调函数失败!";
return;
}
}
void MainWindow::showImage(QImage showImage,int index)
{
QPixmap showPixmap = QPixmap::fromImage(showImage).scaled(QSize(250,200),Qt::IgnoreAspectRatio,Qt::SmoothTransformation);
if(index == 1)
{
ui->lb_image_1->setPixmap(showPixmap);
}
else
{
ui->lb_image_2->setPixmap(showPixmap);
}
}
void MainWindow::on_pb_start_clicked()
{
//开始取图
for(int i=0;i<2;i++)
{
int nRet = m_myCamera[i]->StartGrabbing();
if (MV_OK != nRet)
{
LOGDEBUG<<"i:"<<i<<"开始取图失败!";
return;
}
}
}
void MainWindow::on_pb_stop_clicked()
{
//停止取图
for(int i=0;i<2;i++)
{
int nRet = m_myCamera[i]->StopGrabbing();
if (MV_OK != nRet)
{
LOGDEBUG<<"i:"<<i<<"停止取图失败!";
return;
}
}
}
//回调函数1
void __stdcall MainWindow::ImageCallback_1(unsigned char * pData,MV_FRAME_OUT_INFO_EX* pFrameInfo,void* pUser)
{
LOGDEBUG<<QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss:zzz ")<<"回调函数1执行了";
MainWindow* pThis = (MainWindow*)pUser;
QImage showImage = QImage(pData, pFrameInfo->nWidth,pFrameInfo->nHeight,QImage::Format_RGB888);
pThis->showImage(showImage,1);
}
//回调函数2
void __stdcall MainWindow::ImageCallback_2(unsigned char * pData,MV_FRAME_OUT_INFO_EX* pFrameInfo,void* pUser)
{
LOGDEBUG<<QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss:zzz ")<<"回调函数2执行了";
MainWindow* pThis = (MainWindow*)pUser;
QImage showImage = QImage(pData, pFrameInfo->nWidth,pFrameInfo->nHeight,QImage::Format_RGB888);
pThis->showImage(showImage,2);
}
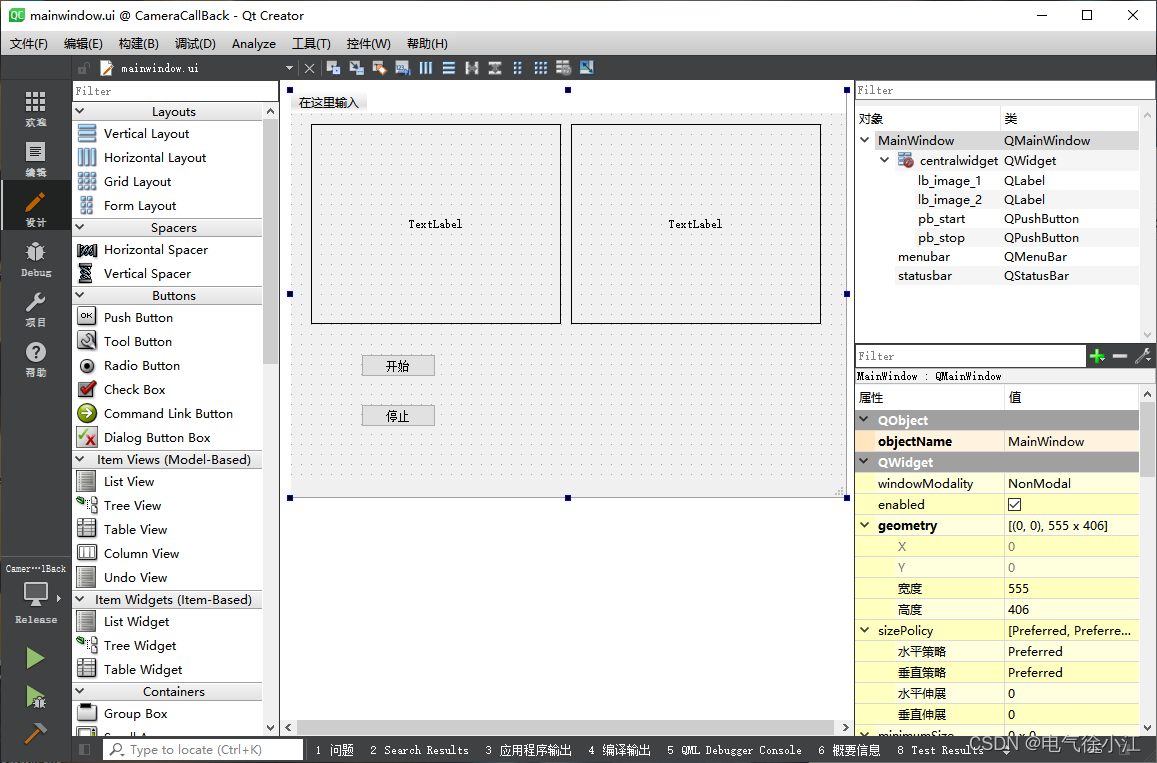
4.mainwindow.ui
四、下载链接
我的示例百度网盘链接:https://pan.baidu.com/s/1J35z54pcP5k0Ss8jlcIY1g
提取码:xxcj
总结
可以看到Qt下连接海康工业相机使用回调取流的整个流程就是这样的,注意一点就是要在打开相机后才能修改相机的各个参数,使用回调取流的方式,会根据你相机的帧率来获取图像的。在这个示例中,使用了两个相机,结果需要两个回调函数来获取对应的图像,如果相机个数更多个呢?那这样是不是就不太方便了,大家可以思考下如何改进下这个问题呢?
hello:
共同学习,共同进步,如果还有相关问题,可在评论区留言进行讨论。
参考博客:海康工业相机采集图像的流程和采集模式分类