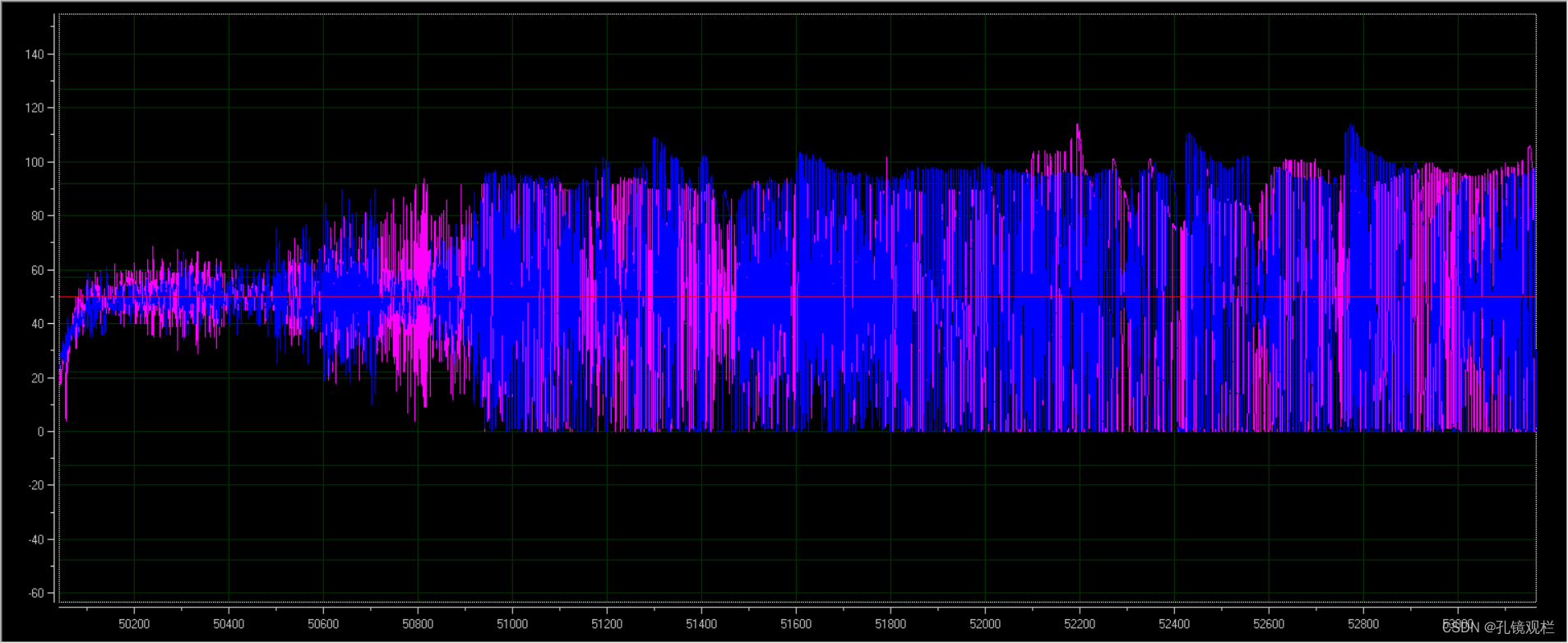
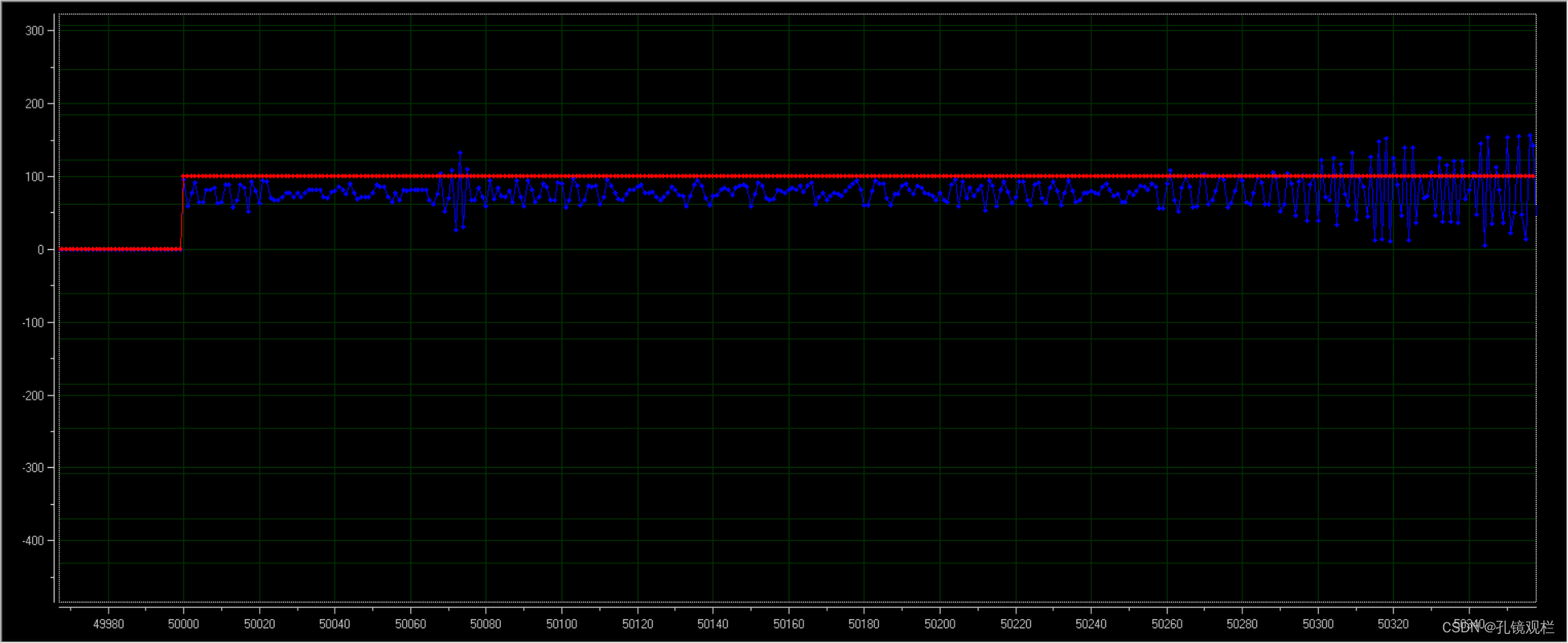
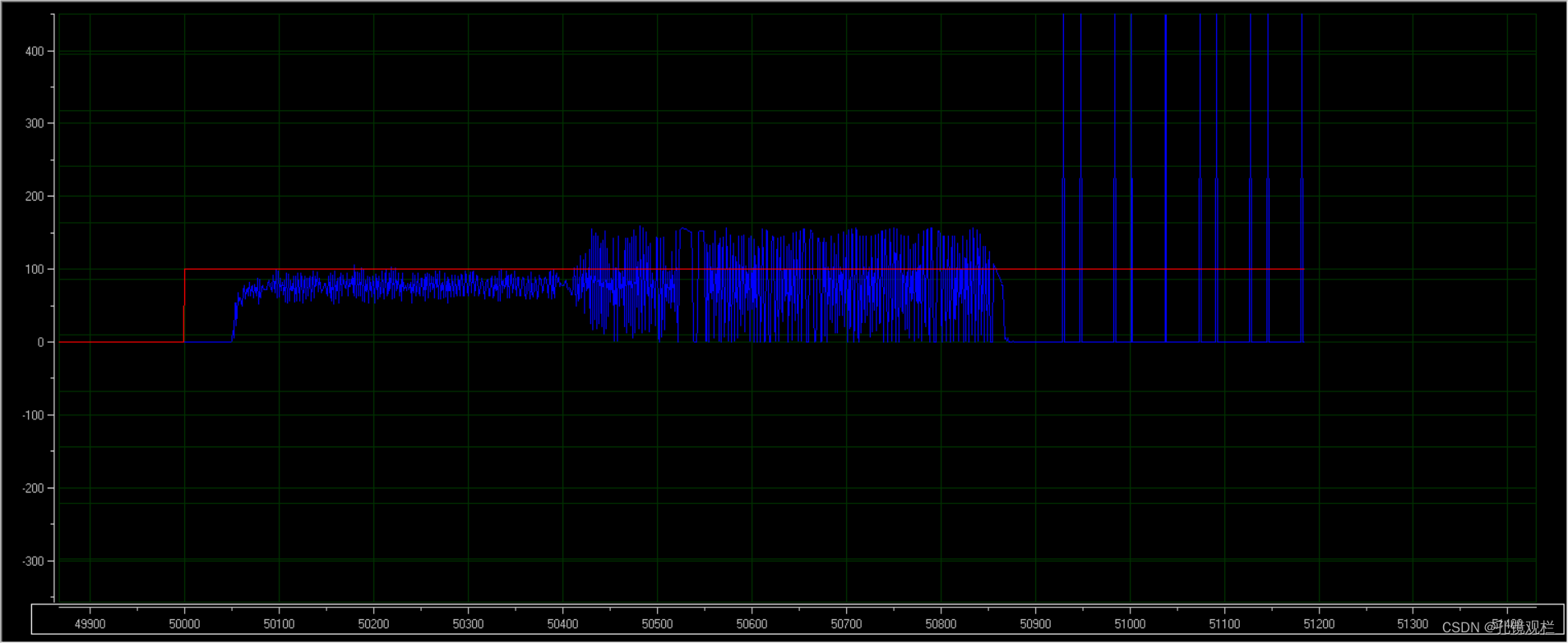
使用了增量式PID,有点难调,数据一直在波动。实际中调参具有很大的不确定性,因为你这次调好了,下次再供电发现又不是那么回事。按照网上传统的调参方法,一般是先调P,I和D为0,逐渐增大P使得实际值快速到达目标值;然后再调接I,使得实际值准确;最好调节D使得波动减小。但发现另一种说法,增量式PID应该先I再P后D。这两种方式我都试过。但还是波动很大。

使用了增量式PID,有点难调,数据一直在波动。实际中调参具有很大的不确定性,因为你这次调好了,下次再供电发现又不是那么回事。按照网上传统的调参方法,一般是先调P,I和D为0,逐渐增大P使得实际值快速到达目标值;然后再调接I,使得实际值准确;最好调节D使得波动减小。但发现另一种说法,增量式PID应该先I再P后D。这两种方式我都试过。但还是波动很大。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/756109.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!