目录
1.目标检测-Overfeat模型
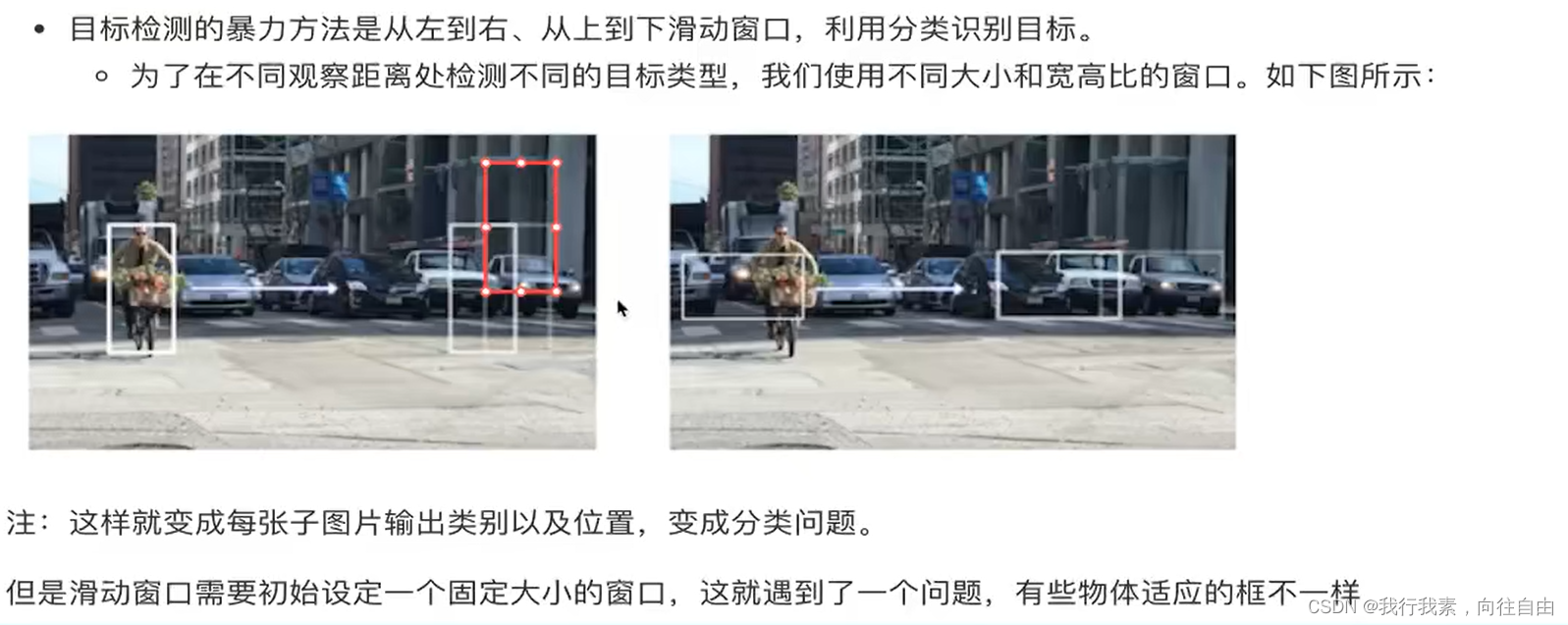
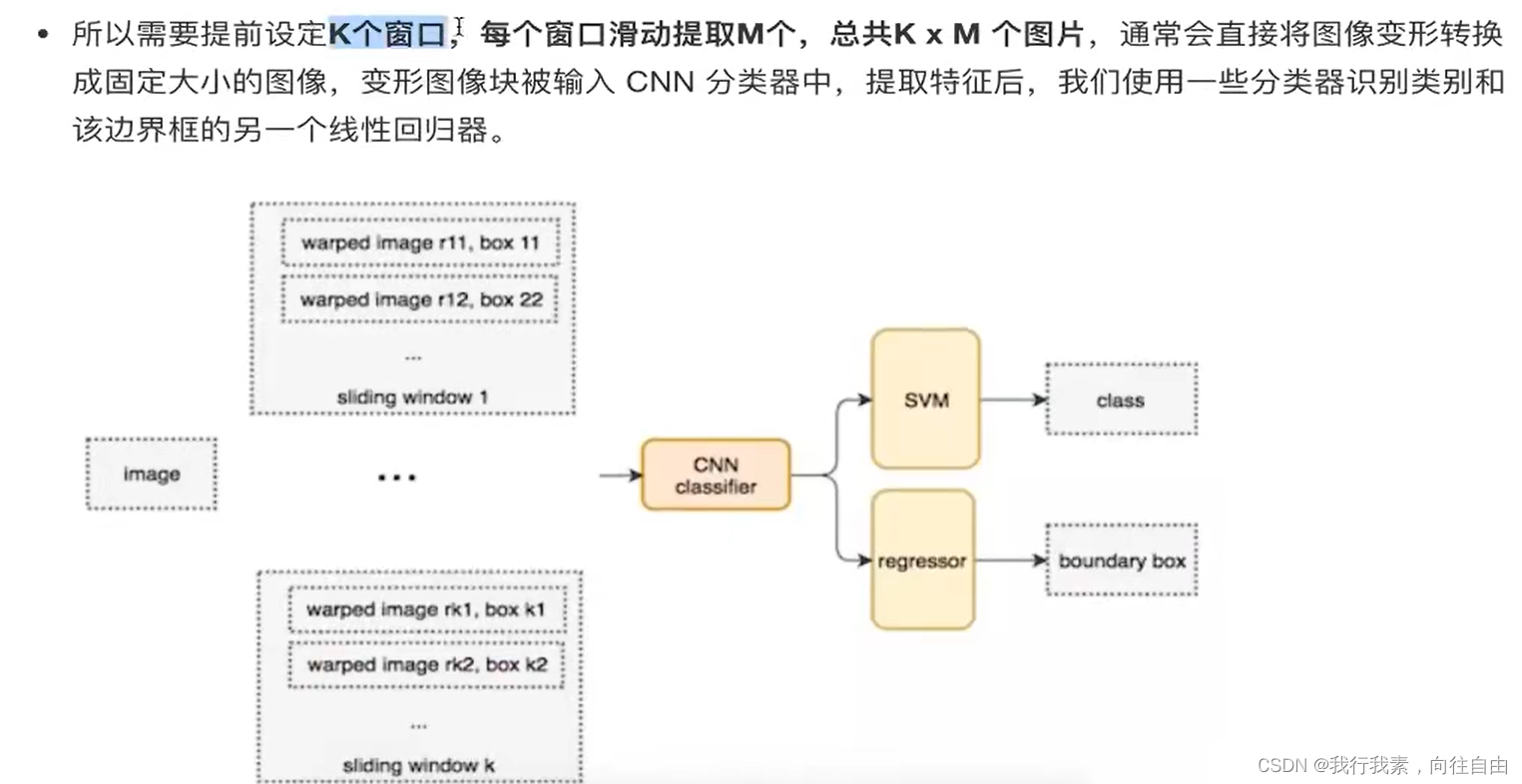
1.1 滑动窗口
1.2 Overfeat模型总结
2.目标检测-RCNN模型
2.1 完整的R-CNN结构
2.1.1 候选区域(Region of lnterest)得出(了解)
2.1.2 CNN网络提取特征
2.1.3 特征向量训练分类器SVM
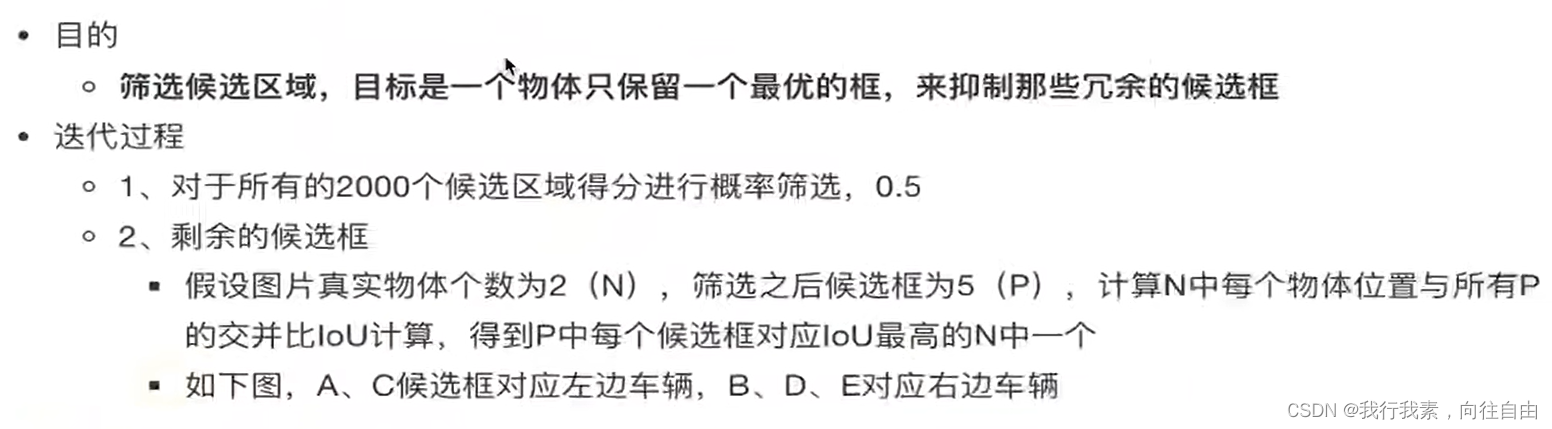
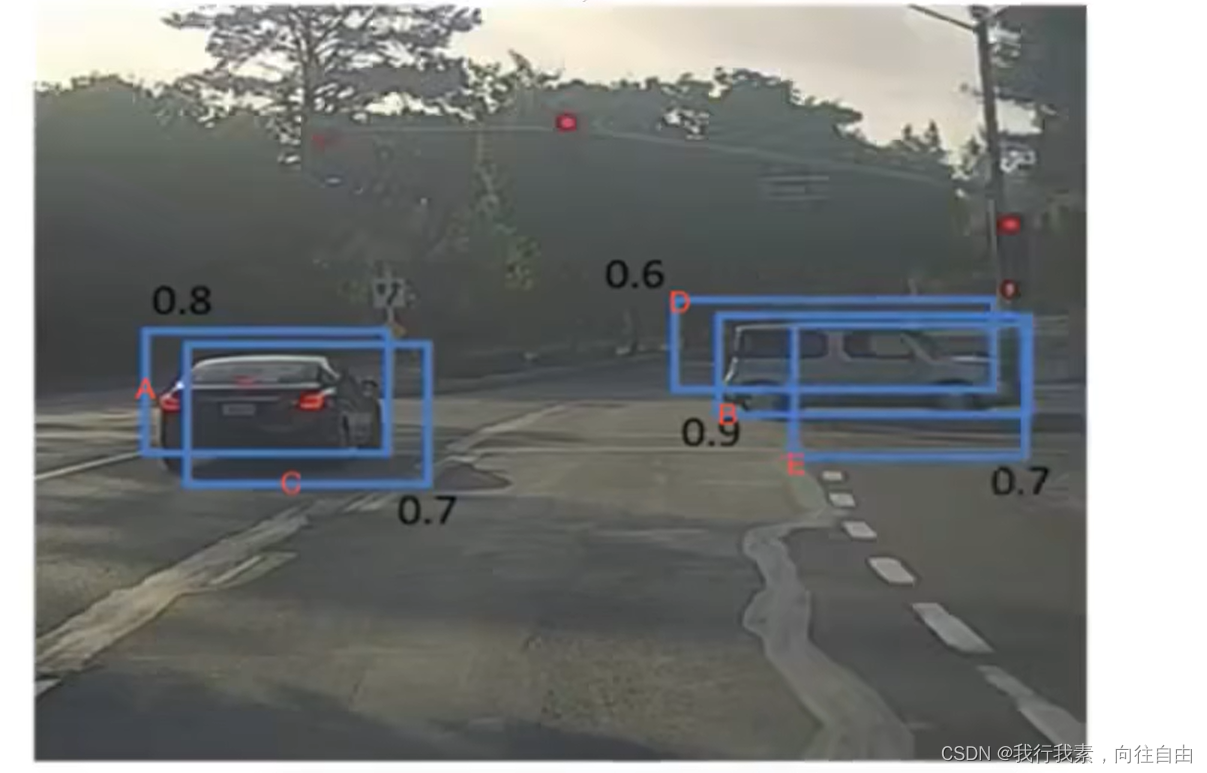
2.1.4 非最大抑制(NMS)
2.1.5 修正候选区域
2.2 检测的评价指标
2.2.1 IoU交并比
2.2.2 平均精确率(mean average precision)MAP
2.3 R-CNN总结
3.改进-SPPNet
3.1 SPPNet
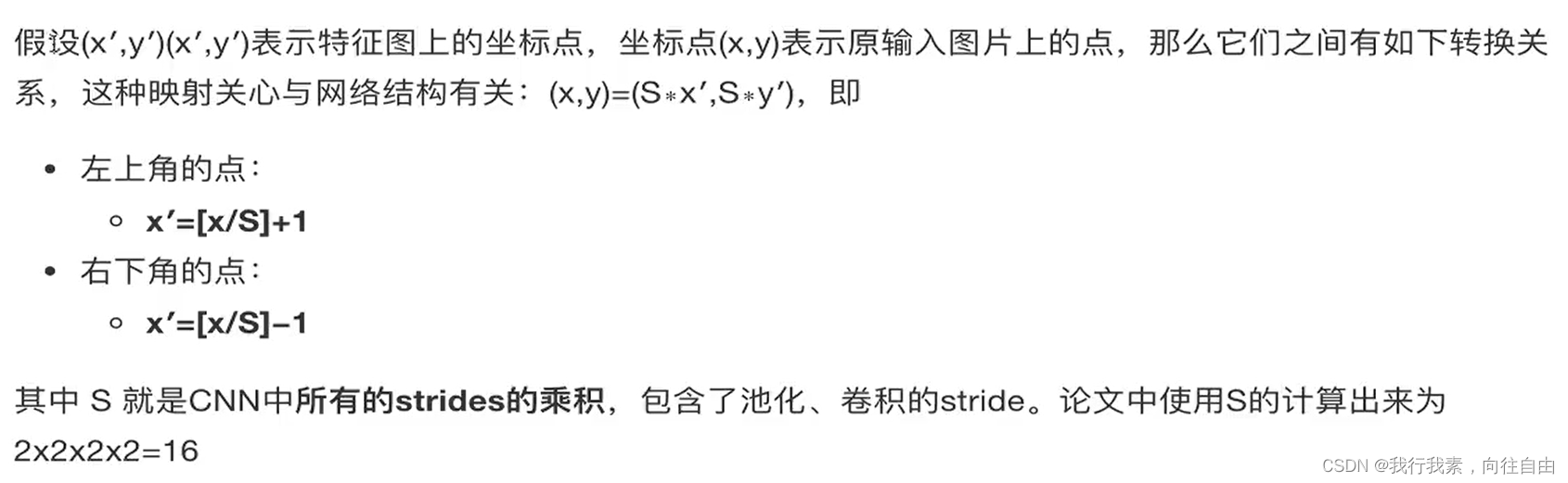
3.1.1 映射
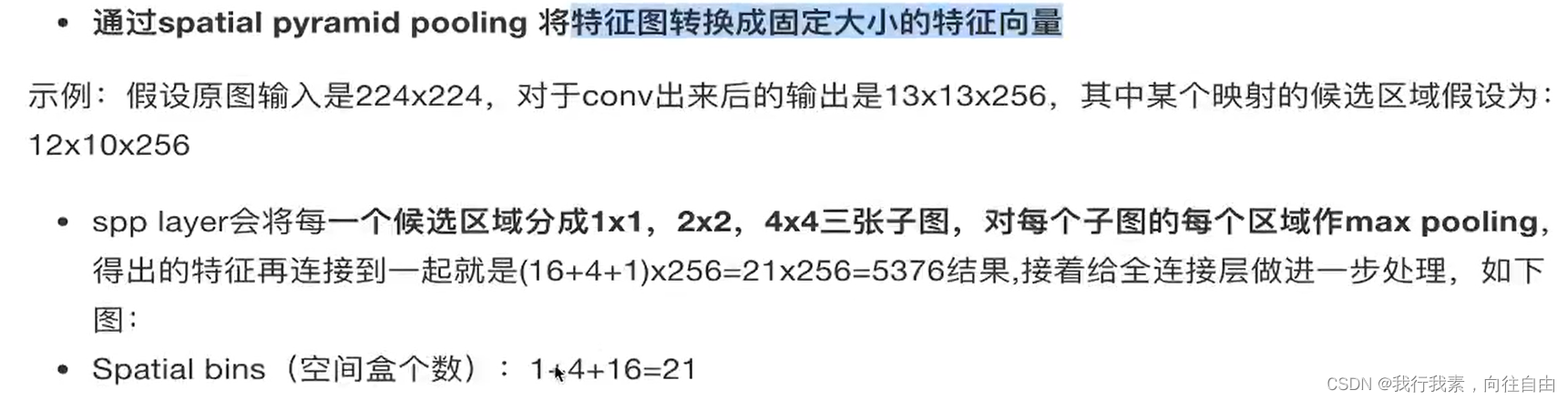
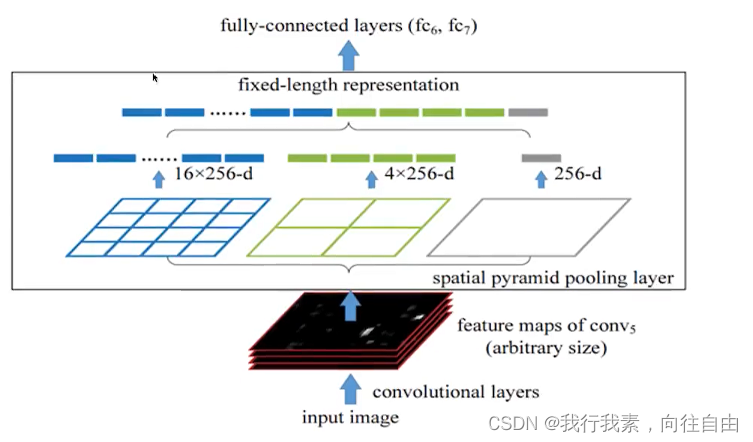
3.1.2 spatial pyramid pooling
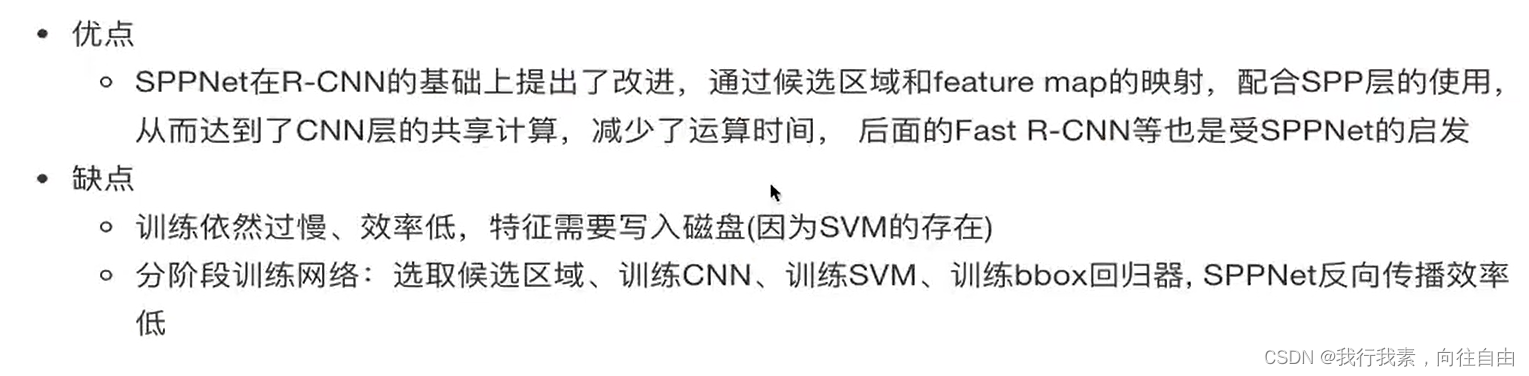
3.1.3 SPPNet总结
4.Fast R-CNN
4.1 Fast R-CNN
1.目标检测-Overfeat模型
1.1 滑动窗口
1.2 Overfeat模型总结
- 暴力破解方式
- 计算消耗太大
2.目标检测-RCNN模型
在CVPR 2014年中Ross Girshick提出R-CNN。
2.1 完整的R-CNN结构
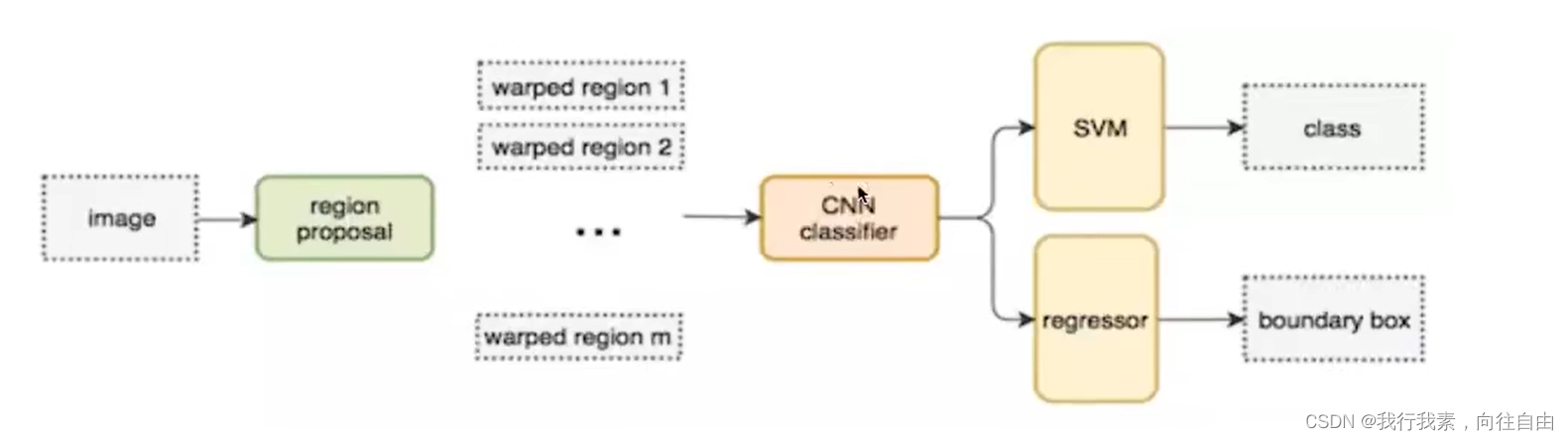
不使用暴力方法,而是用候选区域方法(region proposal method) ,创建目标检测的区域改变了图像领域实现物体检测的模型思路,R-CNN是以深度神经网络为基础的物体检测的模型,R-CNN在当时以优异的性能令世人瞩目,以R-CNN为基点,后续的SPPNet、Fast R-CNN、Faster R-CNN模型都是照着这个物体检测思路。
2.1.1 候选区域(Region of lnterest)得出(了解)
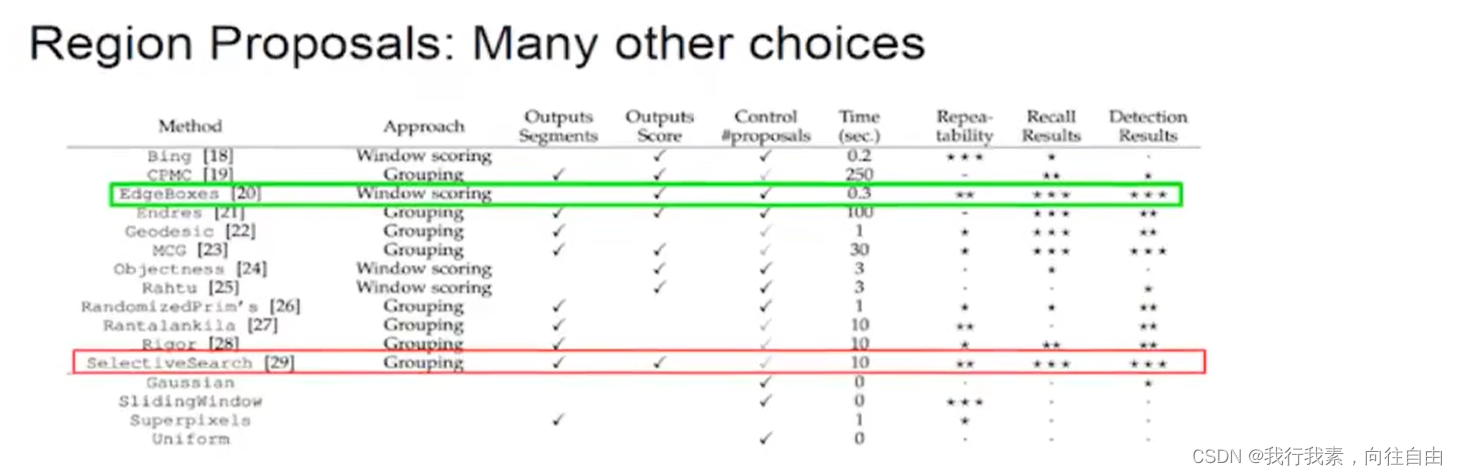

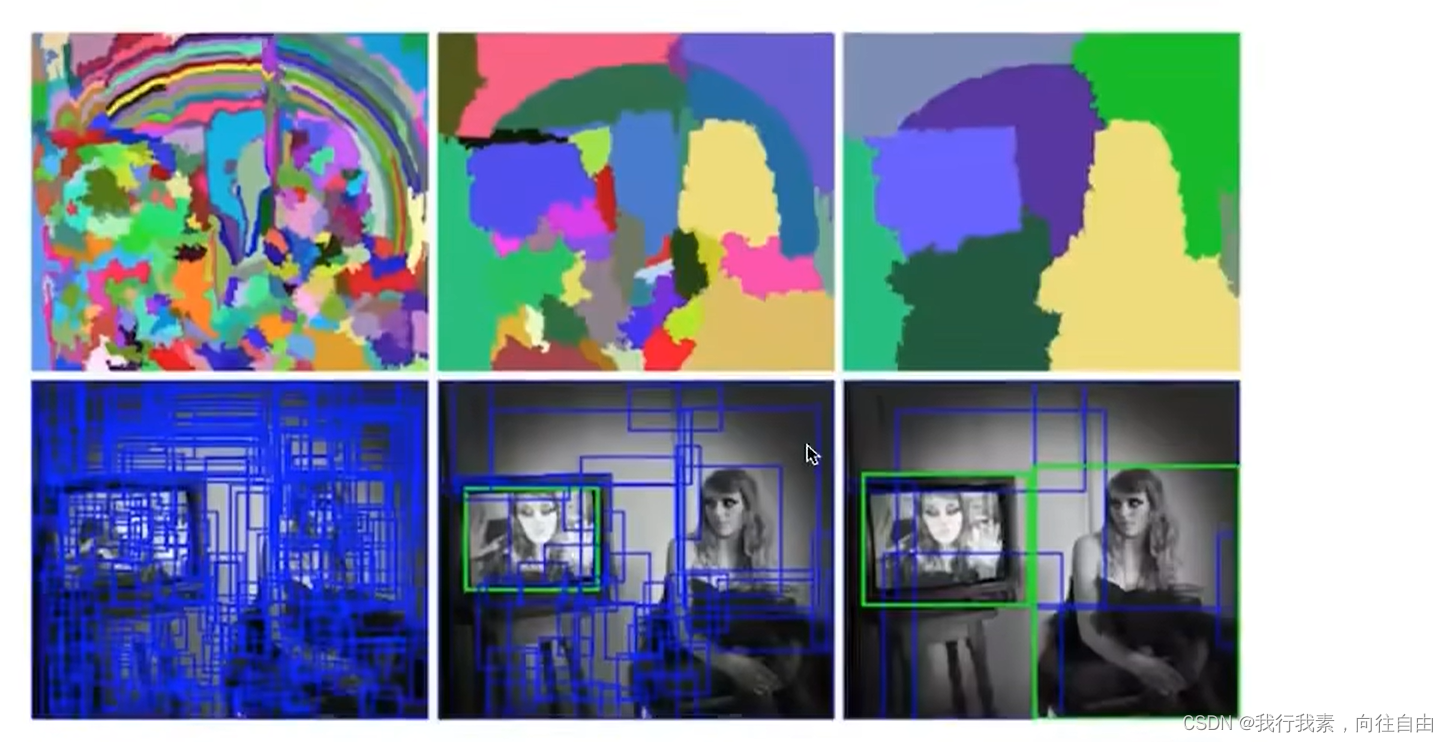
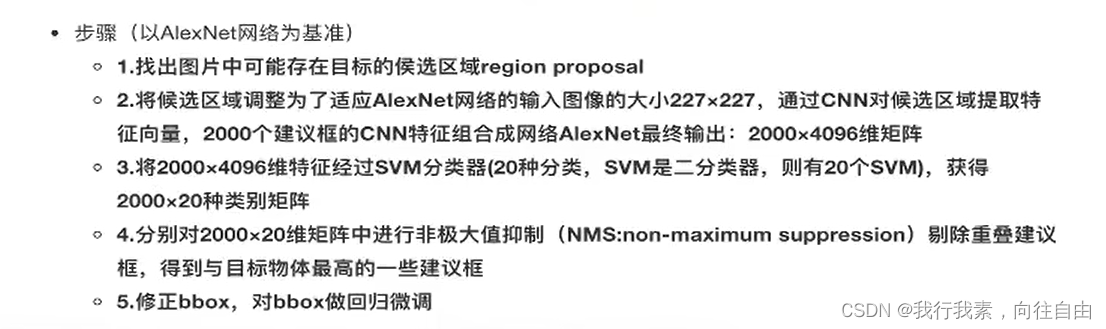
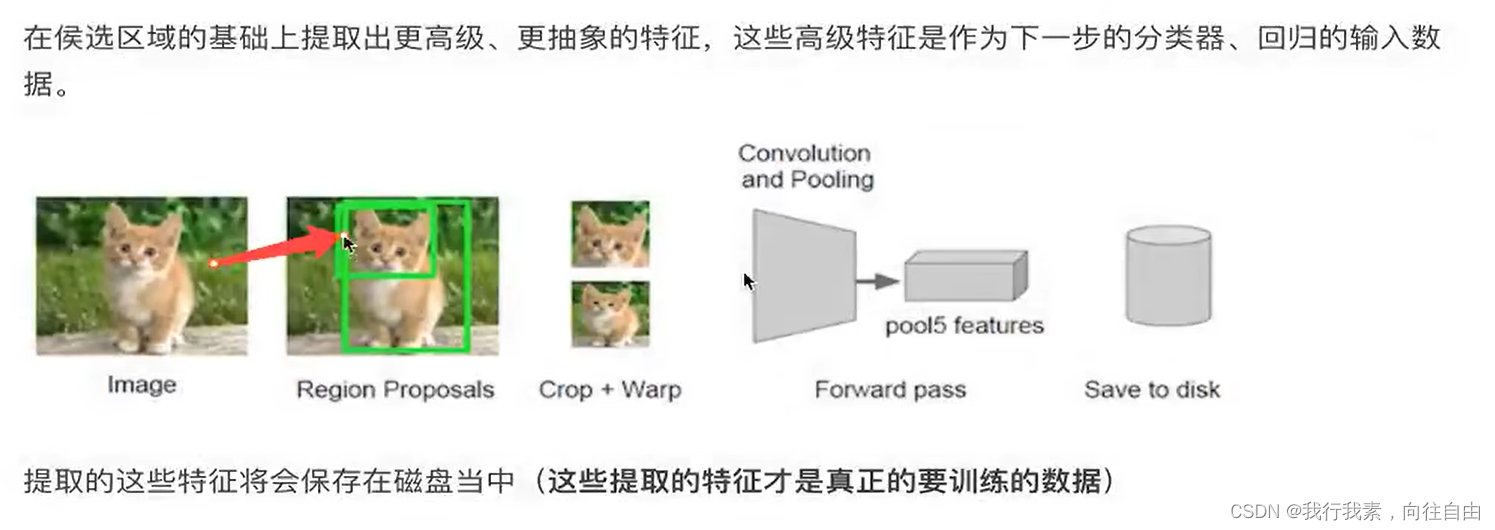
SelectiveSearch在一张图片上提取出来约2000个侯选区域需要注意的是这些候选区域的长宽不固定。而使用CNN提取候选区域的特征向量,需要接受固定长度的输入,所以需要对候选区域做一些尺寸上的修改。
2.1.2 CNN网络提取特征
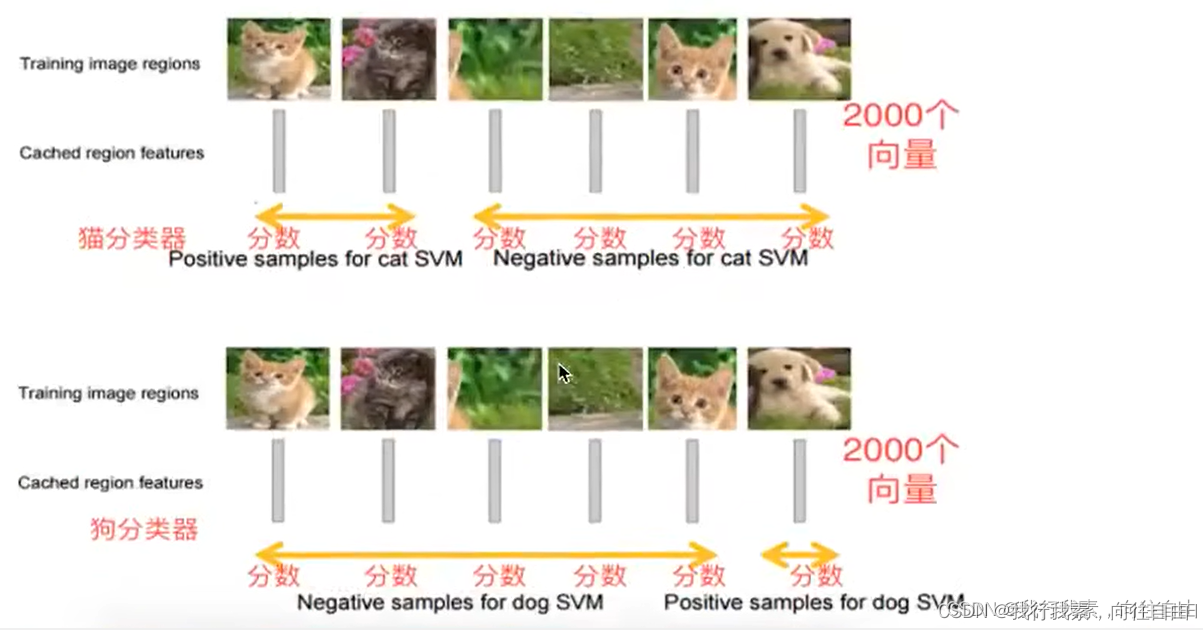
2.1.3 特征向量训练分类器SVM

2.1.4 非最大抑制(NMS)
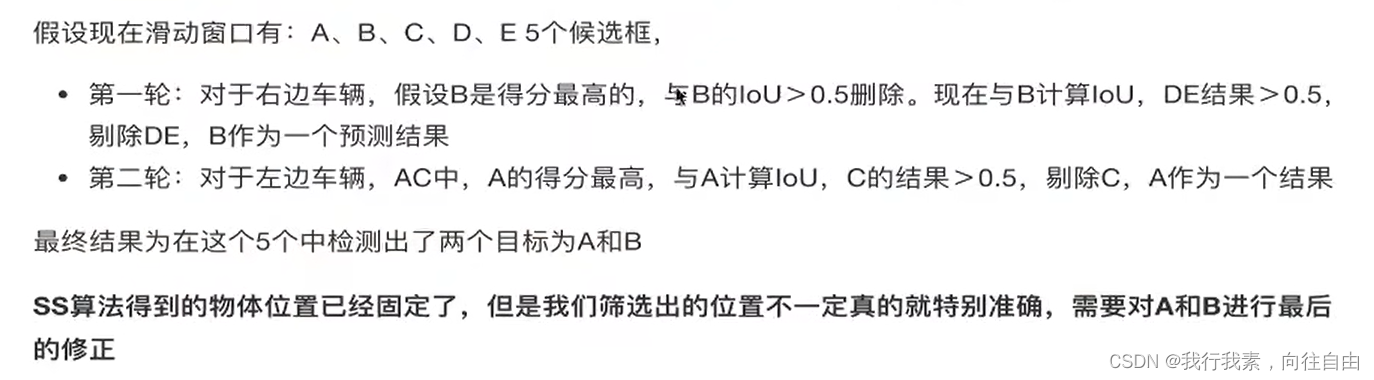
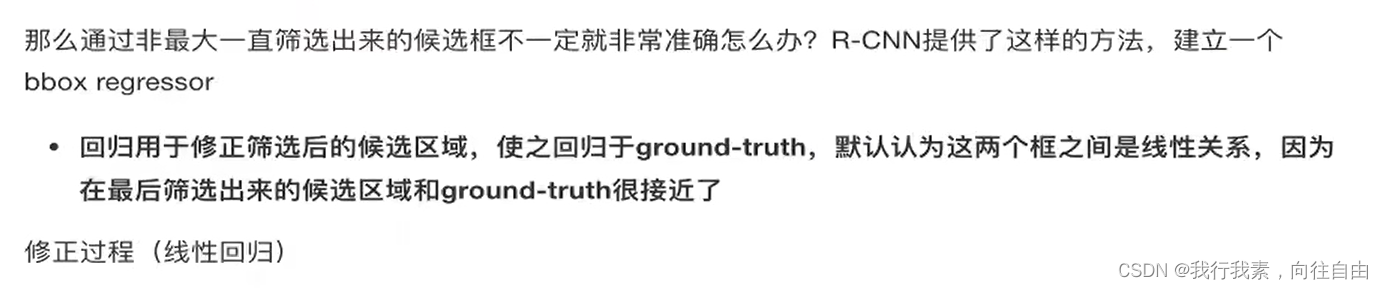
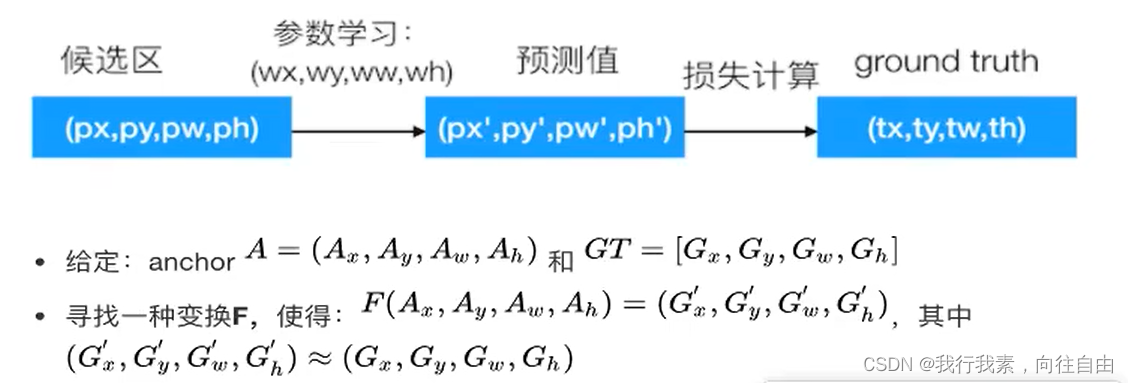
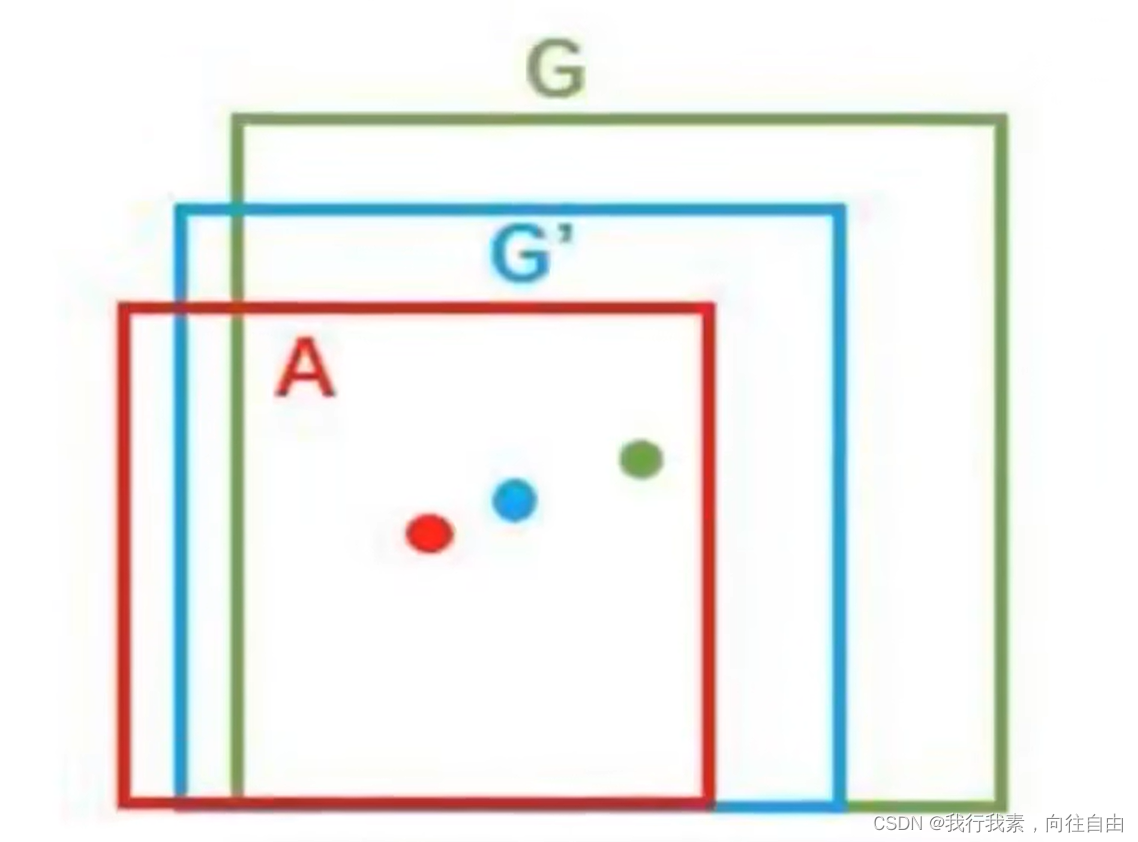
2.1.5 修正候选区域
2.2 检测的评价指标
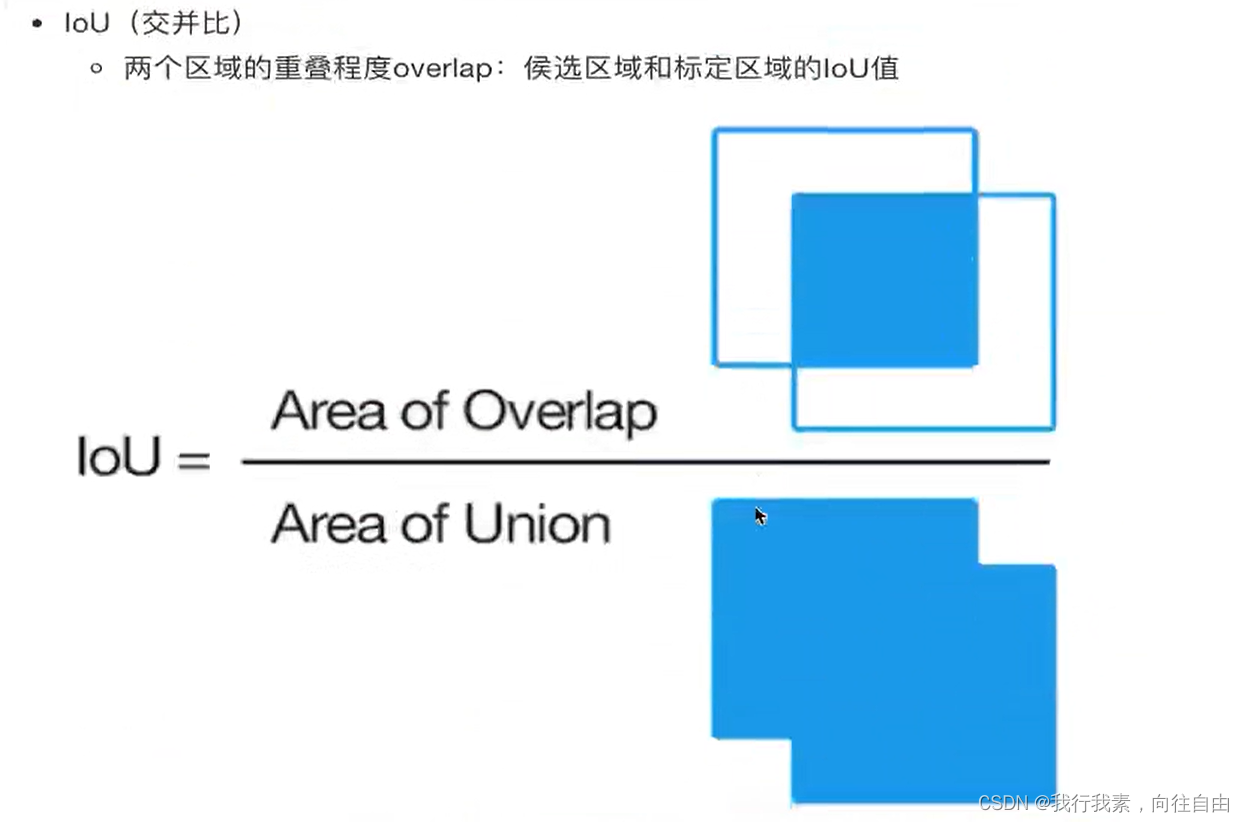
2.2.1 IoU交并比

- IoU交并比:0~1之间的值
- 位置的考量
- 通常Correct:类别正确且loU > 0.5
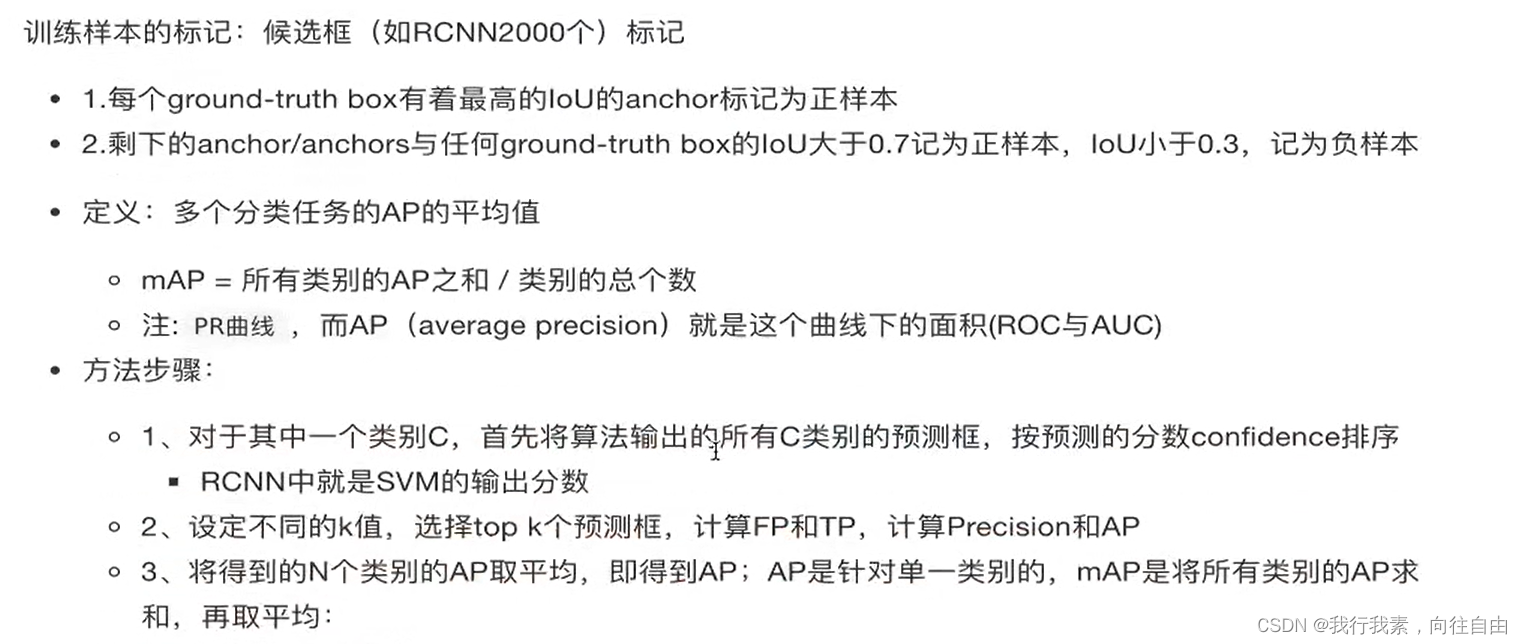
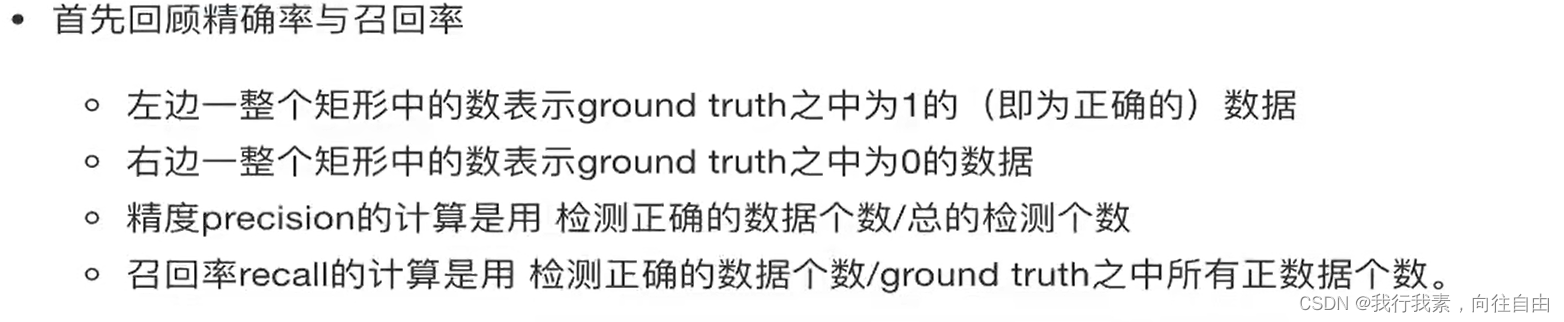
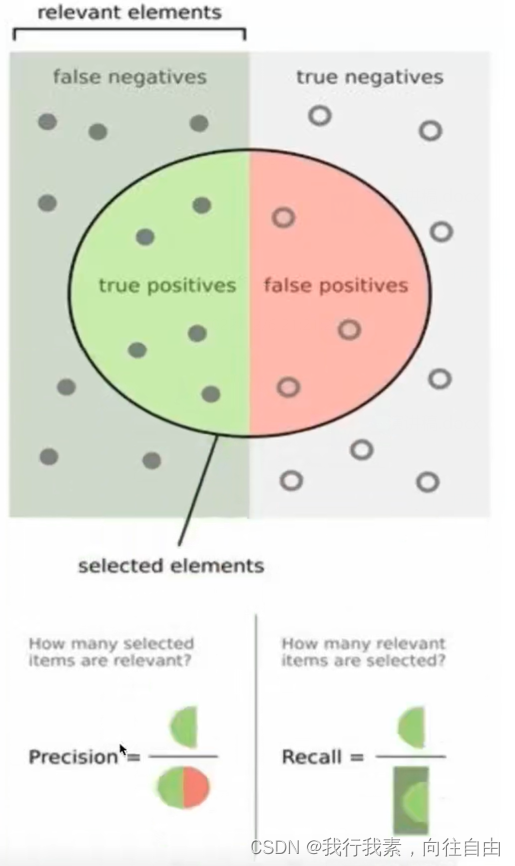
2.2.2 平均精确率(mean average precision)MAP
- 物体检测的:分类准确的考量
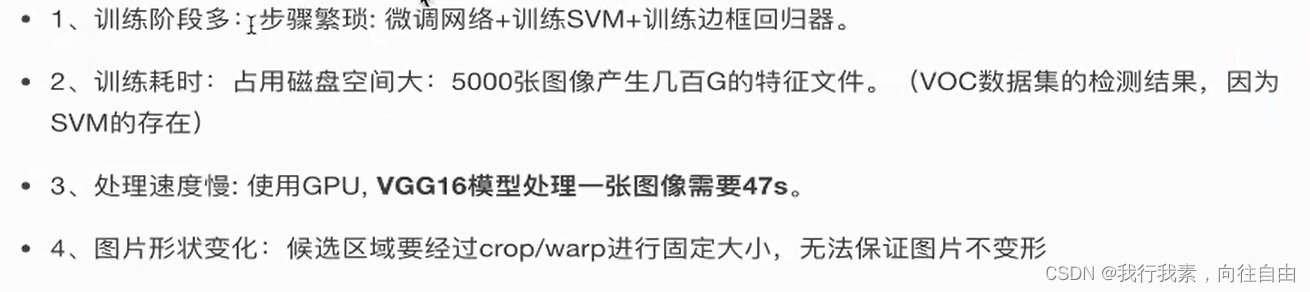
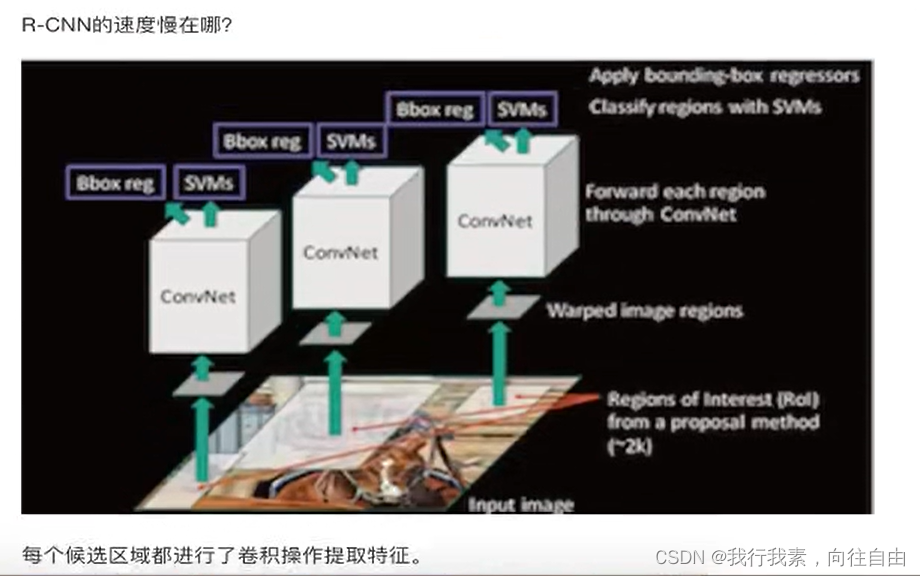
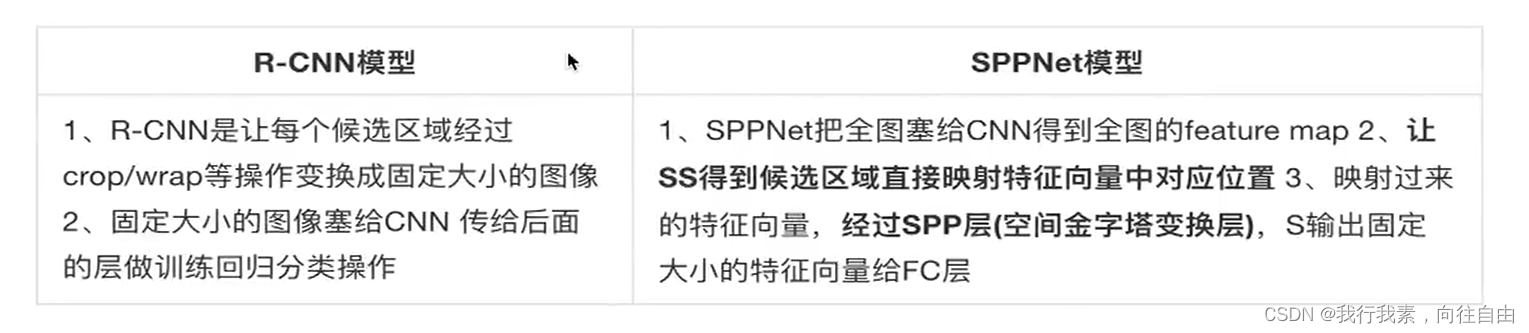
2.3 R-CNN总结
- 表现:在VOC2007数据集上的平均精度map达到66%
- 缺点:
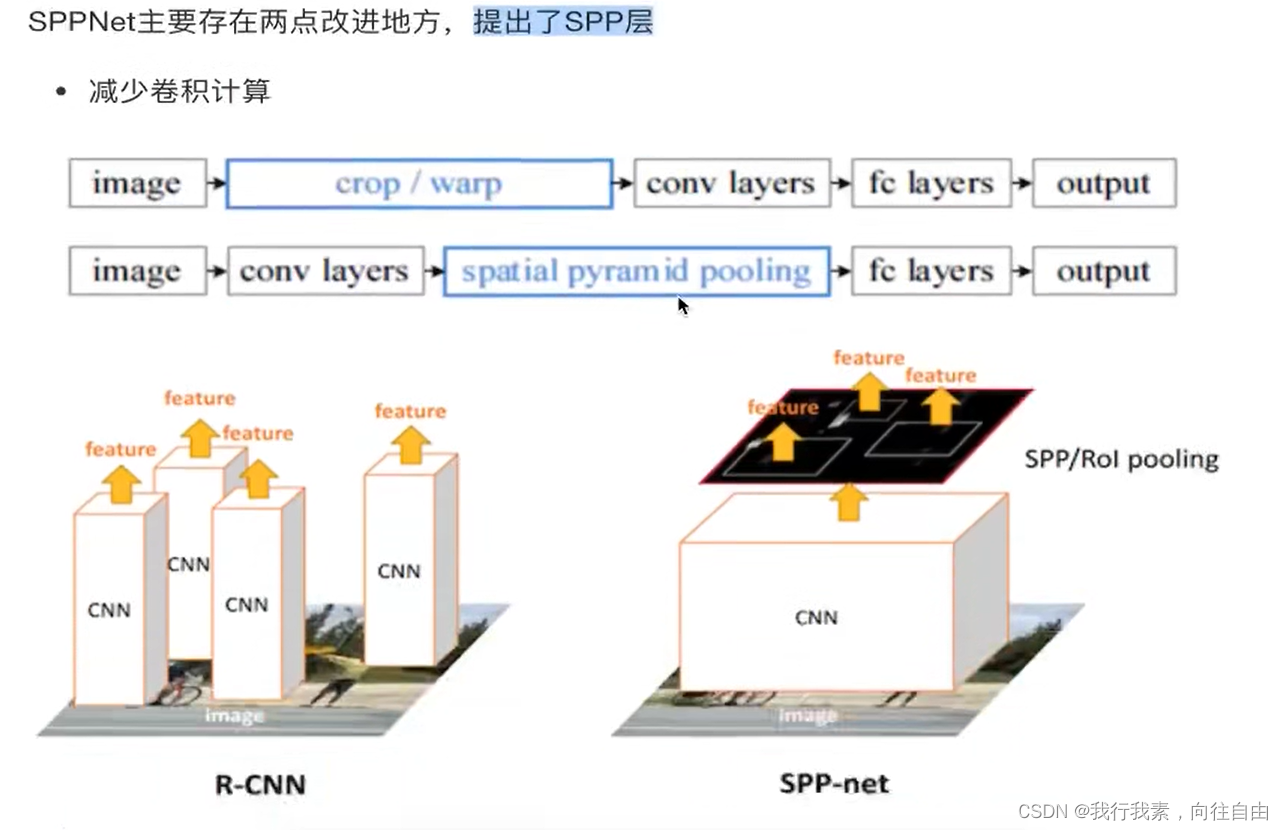
3.改进-SPPNet
3.1 SPPNet
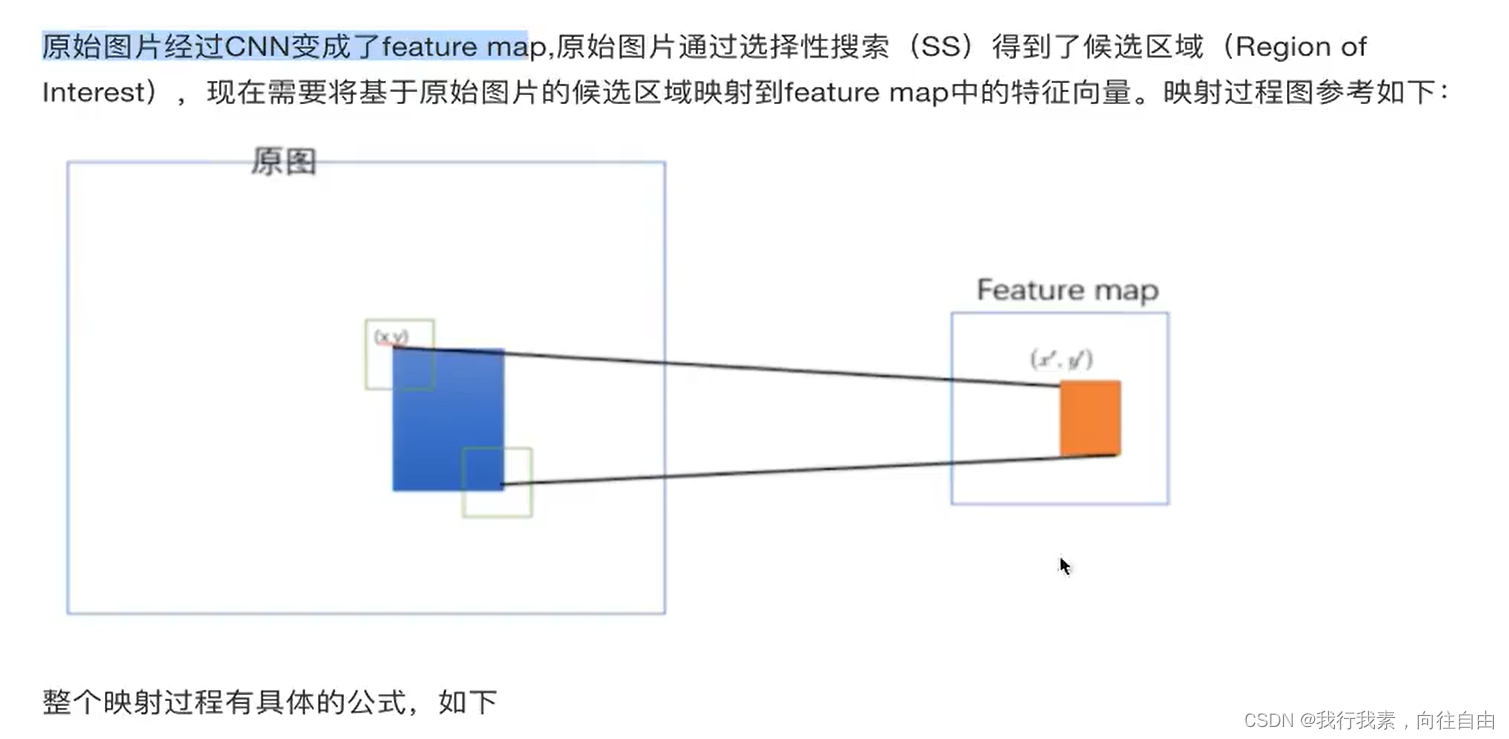
3.1.1 映射

3.1.2 spatial pyramid pooling
3.1.3 SPPNet总结
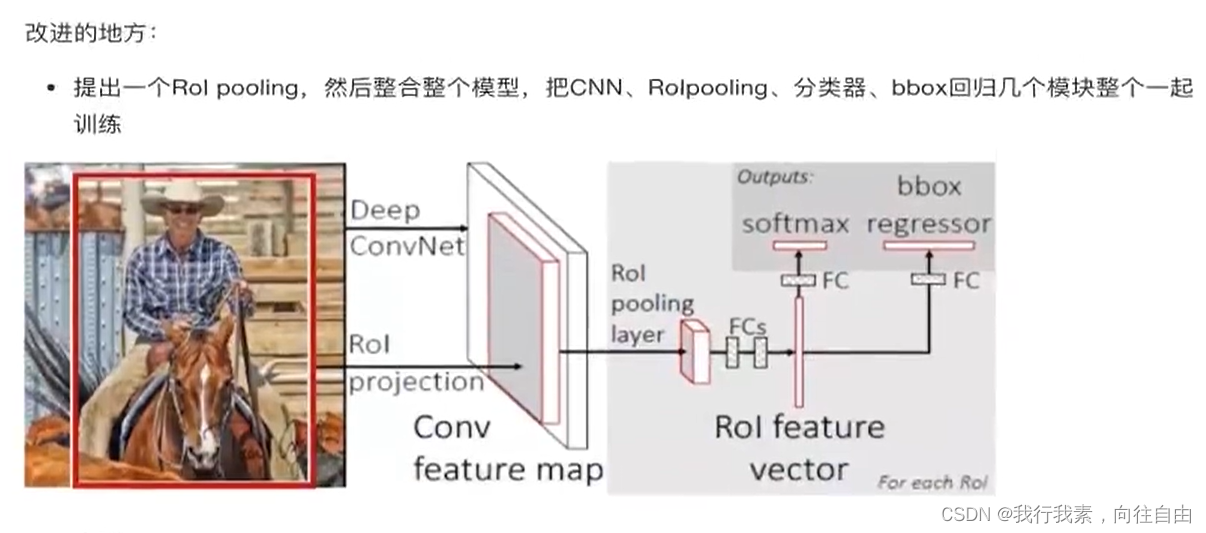
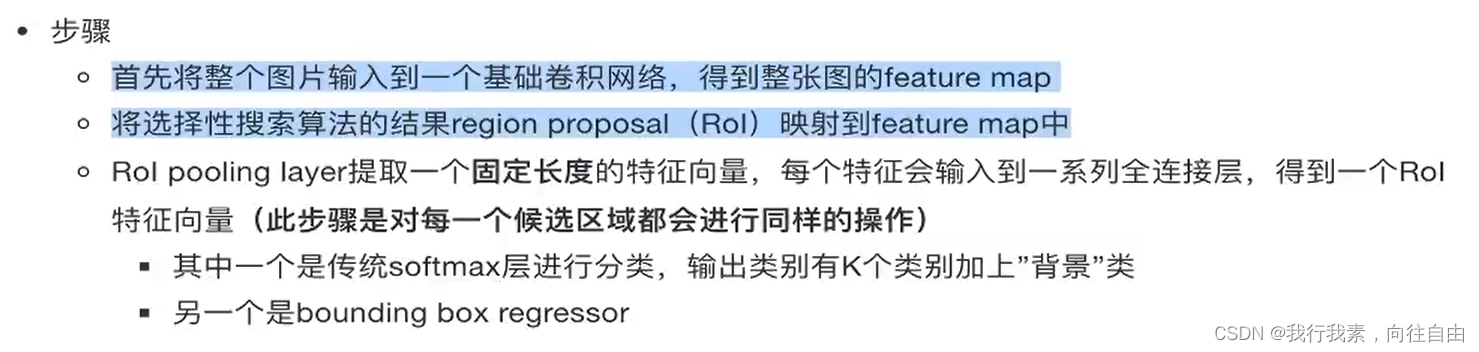
4.Fast R-CNN
SPPNet的性能已经得到很大的改善,但是由于网络之间不统一训练,造成很大的麻烦,所以接下来的FastR-CNN就是为了解决这样的问题。
4.1 Fast R-CNN