博客中所有内容均来源于自己学习过程中积累的经验以及对yalmip官方文档的翻译:https://yalmip.github.io/tutorials/
1.决策变量的定义
1.1 sdpvar
上文简单介绍了sdpvar函数的用法,接下来将对其进行详细介绍。复习一下,sdpvar函数的基本语法如下:
x = sdpvar(n)
x = sdpvar(n,m)
x = sdpvar(n,m,'type')
x = sdpvar(n,m,'type','field')
x = sdpvar(dim1,dim2,dim3,...,dimn,'type','field')
sdpvar x1.1.1)x = sdpvar(n)
该命令用于定义一个n阶的对称变量方阵,当n=1时,也就相当于定义一个标量;
1.1.2)x = sdpvar(n,m)
该命令用于定义一个n行m列的变量矩阵,当n=m时,默认该变量矩阵具有对称性,也就是说,如果使用sdpvar定义了方阵x,则x(i,j) = x(j,i),例如,定义一个3行3列决策变量P的语法如下:
P = sdpvar(3,3);这时候变量P默认为一个对称矩阵,也就是P(1,2) = P(2,1),P(1,3) = P(3,1),P(2,3) = P(3,2)。
1.1.3)x = sdpvar(n,m,'type')
sdpvar函数的第三个参数用于初始化变量的性质,例如需要定义一个不对称的变量P,则需要将第三个参数设置为'full',语法如下:
P = sdpvar(3,3,'full');在定义n阶变量方阵时,其他可使用的'type'参数如表1所示:
表1 sdpvar函数中常用的'type'参数
| 'type'参数 | 简化表示 | 含义 |
| 'full' | 'f' | 完整的不对称变量矩阵 |
| 'symmetric' | 'sy' | 对称变量矩阵 |
| 'diagonal' | / | 对角阵 |
| 'toeplitz' | 't' | 对称托普利茨矩阵 |
| 'hankel' | / | 非对称hankel矩阵 |
| 'rhankel' | / | 对称hankel矩阵 |
| 'skew' | 'sk' | 反对称矩阵 |
| 'Hermitian' | / | hermitian矩阵 |
1.1.4)x = sdpvar(n,m,'type','field')
sdpvar函数中的第四个参数'field'可用于定义复数变量矩阵。不输入任何参数时默认是实数变量矩阵,当需要定义复数矩阵时,可以添加参数'complex',形式如下:
P = sdpvar(3,3,'full','complex');上面的语句就表示定义了一个3阶不对称的复数变量方阵。
1.1.5)sdpvar x
该语句表示定义一个标量x(也可以理解为1行1列的变量),也可以同时定义多个标量,语句如下:
sdpvar a b c d e上述语句就表示定义了5个不同的标量a,b,c,d,e。
综上,在Yalmip工具箱中一共有三种不同的方式定义标量,分别如下:
a = sdpvar(1);
a = sdpvar(1,1);
sdpvar a三个语句的作用完全一样,可以按照自身的使用习惯进行选择。对于二维变量,也可以通过这种方式进行定义,但根据官方文档所述,这种方式可能存在bug,建议谨慎使用:
sdpvar a(2,2);上述代码表示定义一个2行2列的变量a。
1.1.6)定义多维变量(三维及以上)
对于三维以上的变量,Yalmip工具箱可以有两种不同的建模方式(当然还有简单的一种,将多维变量转为低维变量,例如2×3×4的三维变量可以转为2×12的二维变量,也可以转为1×24的一维变量,这里不再赘述),元胞数组和多维sdpvar对象,两种建模方式分别如下:
①定义元胞类型(cell)的sdpvar变量
假设需要定义一个5×20×80的变量M,使用cell定义的方法为:
M = cell(1,5);
for k = 1:5
M{k} = sdpvar(20,80);
end也可以写成:
M = sdpvar(20*ones(5,1),80*ones(5,1));两种定义方式是等价的。

使用cell格式定义多维变量比较方便,但缺点是无法使用一些常用的数学运算函数,例如下面的代码将会报错:
M = sdpvar(20*ones(5,1),80*ones(5,1));
N = sdpvar(20*ones(5,1),80*ones(5,1));
M + N
更高维度的变量也可以采用相同的方式进行定义,例如下面的代码就是定义了一个5×5×10×20的变量L:
L = sdpvar(5,5,10,20);需要主义的是,因为变量L前两个维度是相同的,按照之前的说明,前两个维度始终是对称的,为了定义一个不对称的变量L,也需要添加参数'full':
L = sdpvar(5,5,10,20,'full');这样就可以保证L的前两个维度不是对称的。
1.2 binvar
binvar和sdpvar的语法完全一样,唯一不同的就是使用binvar定义的变量是0-1变量,也就是取值要么为0,要么为1。在实际的优化问题中很多变量都可以建模为0-1变量,例如仓库选址、配电网的支路状态等。同时,对于约束条件中的逻辑“或”的关系,也可以通过0-1变量进行建模(这实际上是线性规划的知识,我在这里只做简单介绍)。下面举两个例子:
例1:
变量x,y满足:4x + 3y ≤ 50 (1) 或x + y ≤ 20 (2)
对于例1的约束条件,可以通过引入一个0-1变量w和一个足够大的正数M进行建模(实际上这就是常说的大M法),建模方式如下:
sdpvar x y
binvar w
M = 1e5;
Constraints = [4*x + 3*y - 50 <= w*M , x + y -20 <= (1-w)*M];当w=1时,约束1成立,当w=0时,约束2成立,这样就通过0-1变量完成了约束条件中逻辑“或”的表达。
例2:
变量x,y满足下面3个不等式其中2个:
4x + 3y ≤ 50,x + y ≤ 20,3x+2y <= 35
对于例2的约束条件,可以通过引入一个3维0-1变量w和一个足够大的正数M进行建模,建模方式如下:
sdpvar x y
w = binvar(1,3);
M = 1e5;
Constraints = [
4*x + 3*y - 50 <= w(1)*M ,...
x + y -20 <= w(2)*M , ...
3*x +2*y -35 <= w(3)*M , ...
sum(w) == 2];当w1=1时,约束1成立,当w2=1时,约束2成立,当w3=1时,约束3成立,同时令w1+w2+w3=2,这样就通过0-1变量完成了3个约束条件中必须满足其中2个的表达。
通过0-1变量,还可以实现分段函数、分类讨论等表达,此处不再赘述。
另外,也可以先把变量定义为连续型,然后通过binary函数约束为0-1变量,具体用法如下:
x = sdpvar(2,3);
Constraints = [binary(x)];1.3 intvar
intvar和sdpvar的语法完全一样,唯一不同的就是使用intvar定义的变量是整数变量,也就是取值只能为整数。在实际的优化问题中很多变量都可以建模为整数变量,例如人数、商品件数等。
1.4 semivar
semivar和sdpvar的语法完全一样,唯一不同的就是使用semivar定义的变量是半连续变量,也就是取值要么为0,要么为某个区间内的连续变量。但使用semivar时,可能会出现求解器不支持的情况。按上文的介绍,这种变量可以理解为逻辑“或”的关系,可以通过引入0-1变量使用大M法进行建模。为了避免求解器不支持导致模型无法求解,所以semivar很少使用,通常都会应用大M法对半连续变量进行建模。
2.决策变量相关函数
在这一节的介绍之前,首先说明一点,sdpvar时Yamlip中的一个函数,用于定义决策变量,定义的决策变量在Matlab中为sdpvar类型。而binvar、intvar等函数定义的决策变量,本质上就是带有约束的sdpvar类型变量。所以,下面介绍的决策变量相关函数适用于所有sdpvar类型的变量,而不仅仅是通过sdpvar函数定义的变量。
2.1常见的数学运算
Matlab中几乎所有的数学运算都可应用于sdpvar类型的变量,最常用的数学运算函数以及符号如表2所示:
表2 sdpvar类型变量常用的数学运算
| 数学运算 | 含义 | 用法 |
| + | 加法 | x+y |
| - | 减法 | x-y |
| * | 乘法,可用于标量和矩阵相乘以及矩阵乘法 | x*y |
| .* | 用于维度相同的矩阵,表示对应元素相乘 | x.*y |
| abs | 求绝对值 | y = abs(x) |
| det | 求行列式,仅用于方阵 | y = det(x) |
| exp | 指数函数 | y = exp(x) |
| floor | 向下取整 | y = floor(A) |
| log,log2,log10 | 对数函数 | y = log(A) y = log2(A) y = log10(A) |
| min/max | 求最大值/最小值 | y = min(x) y = min(x,z) y = min(x,[],dim) [y,loc]= min(x,[],dim) |
| norm | 求1范数、2范数、∞范数 | y = norm(x) y = norm(x,1) y = norm(x,2) y = norm(x,inf) |
| pnorm | 求p范数 | y = pnorm(x,q/r); y = pnorm(x,p,'power') |
2.2 value函数
value函数是最常用的决策变量处理函数之一,可以在优化问题求解成功之后,提取决策变量的取值,其语法如下:
Y = value(X)例如,下面的代码就是在求解优化问题后求出决策变量与目标函数的取值:
sdpvar x y
objective = 2*x + 3*y;
Constraints = [x + y >= 2 , 2*x - 3*y <= 9 , x>=0];
optimize(Constraints,objective)
x = value(x)
y = value(y)
objective = value(objective)运行结果如下:
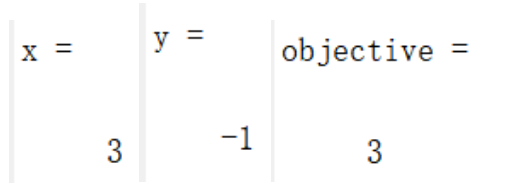
优化问题求解成功后,通过使用value函数我们可以知道该线性规划问题的目标函数2x+3y在(3,-1)处取得最小值3。
2.3 sdisplay函数
sdisplay函数可以用来以符号的形式显示sdpvar变量,其语法如下:
s = sdisplay(p,[digits])其中,p为一个sdpvar变量,digits表示四舍五入的位数。例如:
x1 = sdpvar(1,1);
x2 = sdpvar(1,1);
f1 = x1^2 + 5*x2^2;
f2 = 3*x1^3 + x2;
m1 = sdisplay(f1)
m2 = sdisplay(f2)
m3 = sdisplay(f1*f2)运行结果为:
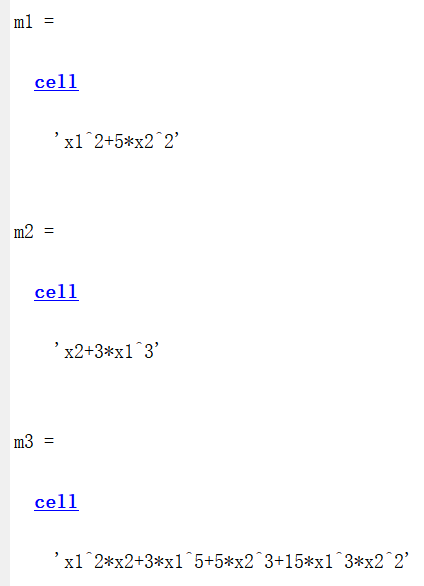
在调试代码的过程中,合理地应用sdisplay函数可以帮助我们确认目标函数或者约束条件的公式是否书写正确。
2.4 binmodel函数
binmodel函数通过引入其他变量和约束,将涉及0-1变量和连续变量的多项式表达式转换为线性表达式,其语法如下:
[plin1,...,plinN,F] = binmodel(p1,...,pN,Domain)
其中plin1-plinN表示线性化之后的表达式,F表示相应的约束条件,p1-pN为初始表达式,Domain为连续变量的取值范围。下面是一个示例代码:
binvar a b
sdpvar x y
[plinear01,plinear02,F0] = binmodel(a^3+b,a*b);
[plinear1,plinear2,F] = binmodel(a^3*x+b*y,a*b*x, -2 <=[x,y] <=2);在上述代码中,plinear01对应线性化后的表达式a^3+b,plinear02对应于线性化之后的表达式a*b,F0为可行域,由于原始表达式中不包含连续变量,所以不需要指定取值范围;plinear1对应线性化后的表达式a^3*x+b*y,plinear2对应于线性化之后的表达式a*b*x,F0为可行域,连续变量的取值范围被限定在[-2,2]。
2.5 assign函数
assign函数用来给sdpvar变量指定一个取值,其语法如下:
assign(X,value)例如下面的代码就是将变量x赋值为1
sdpvar x
assign(x,1)
value(x)运行结果为:
2.6 is函数
is函数用于检查sdpvar变量是否为某类型的变量,其语法如下:
d = is(x,property)当变量x满足属性’property’时,d取值为1,否则取值为0。下面的示例代码时检查变量是否为线性:
x = sdpvar(1,1);
y1 = x*x;
y2 = 2*x;
m1 = is(y1,'linear')
m2 = is(y2,'linear')运行结果为:
上面的代码中,变量y1为非线性,因此m1=0,y2为线性,因此m2=1。其他常用的类型如表3所示:
表3 is函数常用的判断类型
| 属性 | 含义 |
| 'real' | 实数 |
| 'symmetric' | 对称 |
| 'hermitian' | 自共轭 |
| 'scalar' | 标量 |
| 'linear' | 线性 |
| 'bilinear' | 双线性 |
| 'quadratic' | 二次型 |
| 'integer' | 整数 |
| 'binary' | 0-1变量 |
2.7 int函数
int函数使用sdpvar形式返回多项式的积分(注意只能返回多项式的积分,无法实现其他非线性表达式的积分),其语法如下:
F = int(f,x,from,to)下面是一个例子:
sdpvar x1 x2 T
p = 4*x1^4 + x1*x2;
m1 = sdisplay(int(p))
m2 = sdisplay(int(p,x2))
m3 = sdisplay(int(p,[x1 x2],[0 0],[1 T]))
m4 = sdisplay(int(p,[x1 x2],[0 0],[1 x2]))运行结果为:
上面的结果中,m1展示了对p中包含的所有变量求积分的结果;m2中只对变量x2求积分;m3中同时对变量x1和x2求积分,并指定了积分上下限。
2.8 jacobian函数
jacobian函数以sdpvar变量形式返回多项式的导数,其语法如下:
J = jacobian(p)
J = jacobian(p,x)其中,p为初始多项式,x为需要求导数的变量。下面是一个例子:
x1 = sdpvar(1,1);
x2 = sdpvar(1,1);
f = x1^2+5*x2^2;
m1 = sdisplay(jacobian(f))
m2 = sdisplay(jacobian(f,x2))其运行结果为:
2.9 linearize函数
linearize函数用来求出多项式p(x)在x=value(x)处的切线表达式,其语法如下:
h = linearize(p)例子:
x = sdpvar(1,1);
f = x^2;
assign(x,1);
m1 = sdisplay(linearize(f))
assign(x,3);
m2 = sdisplay(linearize(f))运行结果:
2.10 replace函数
replace函数用于将一个sdpvar类型变量替换为另一个sdpvar类型变量、表达式或者常数,其语法如下:
newexpression = replace(expression,variable,replacement)例如,可以用常数替换表达式中对应的变量:
sdpvar x y a b
p = 1 + x^2 + y;
m1 = replace(p,[x y],[7 8])
p1 = replace(p,[x y],[a^2 b^4]);
m2 = sdisplay(p1)运行结果为:
3.测试题
3.1测试1
求如下优化问题的解并将结果在命令行展示
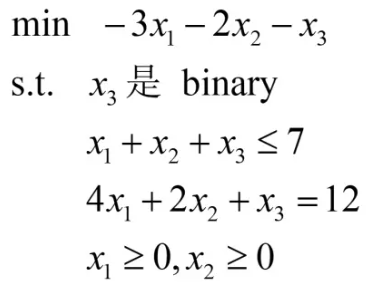
3.2测试2
一汽车厂生产小、中、大三种类型的汽车,已知各类型每辆车对钢材、劳动时间的需求,利润以及每月工厂钢材、劳动时间的现有量如表4所示,试制定月生产计划,使工厂的利润最大。
表4 相关数据
| 小型 | 中型 | 大型 | 现有量 | |
| 钢材/吨 | 1.5 | 3 | 5 | 600 |
| 劳动时间/小时 | 280 | 250 | 400 | 60000 |
| 利润/万元 | 2 | 3 | 4 |
3.3测试3
请使用Yalmip工具箱求积分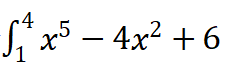 的取值。
的取值。
3.4测试4
请使用Yalmip工具箱求函数![]() 在点(-1,f(-1))处的切线方程。
在点(-1,f(-1))处的切线方程。
3.5测试题参考答案
第二章测试题的参考答案可以从下面的链接中获取:
https://download.csdn.net/download/weixin_44209907/88049325




![[GFCTF 2021]Baby_Web(CVE-2021-41773) 从一道题入门PHP代码审计 (保姆级)](https://img-blog.csdnimg.cn/img_convert/48352596c40573e5568ab1a53f8be7e6.png)