任务调度
什么是任务调度?
调度器就是使用相关的调度算法来决定当前需要执行的哪个任务。 FreeRTOS中开启任务调度的函数是 vTaskStartScheduler() ,但在 CubeMX 中被封装为 osKernelStart() 。
FreeRTOS的任务调度规则是怎样的?
FreeRTOS 是一个实时操作系统,它所奉行的调度规则:
1. 高优先级抢占低优先级任务,系统永远执行最高优先级的任务(即抢占式调度)
2. 同等优先级的任务轮转调度(即时间片调度)
还有一种调度规则是协程式调度,但官方已明确表示不更新,主要是用在小容量的芯片上,用得 也不多。
抢占式调度运行过程
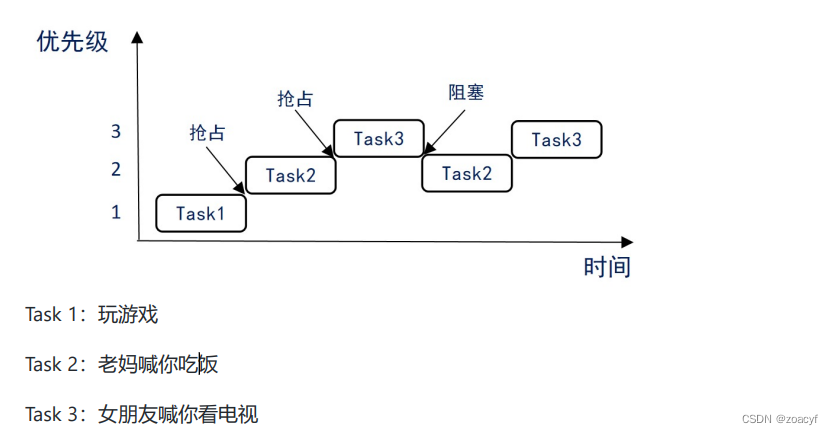
总结: 1. 高优先级任务,优先执行;
2. 高优先级任务不停止,低优先级任务无法执行;
3. 被抢占的任务将会进入就绪态
时间片调度运行过程
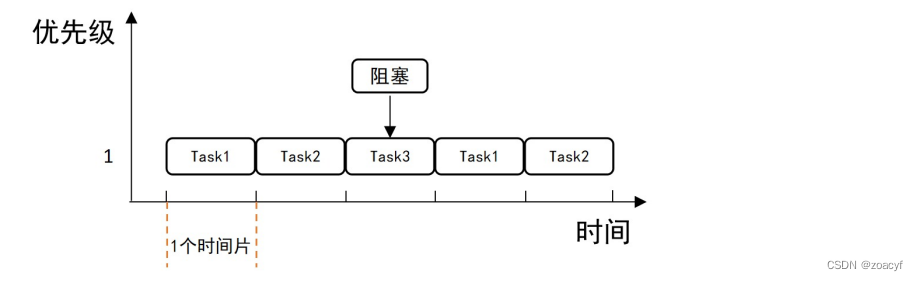
总结:
1. 同等优先级任务,轮流执行,时间片流转;
2. 一个时间片大小,取决为滴答定时器中断周期;
3. 注意没有用完的时间片不会再使用,下次任务 Task3 得到执行,还是按照一个时间片的时钟 节拍运行
任务的状态
FreeRTOS中任务共存在4种状态:
- Running 运行态 当任务处于实际运行状态称之为运行态,即CPU的使用权被这个任务占用(同一时间仅一个任务 处于运行态)。
- Ready 就绪态 处于就绪态的任务是指那些能够运行(没有被阻塞和挂起),但是当前没有运行的任务,因为同 优先级或更高优先级的任务正在运行。
- Blocked 阻塞态 如果一个任务因延时,或等待信号量、消息队列、事件标志组等而处于的状态被称之为阻塞态。
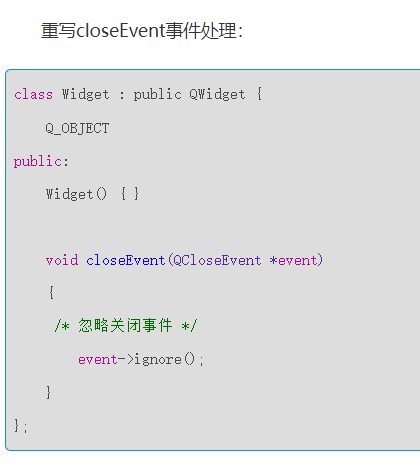
- Suspended 挂起态 类似暂停,通过调用函数 vTaskSuspend() 对指定任务进行挂起,挂起后这个任务将不被执行, 只有调用函数 xTaskResume() 才可以将这个任务从挂起态恢复。
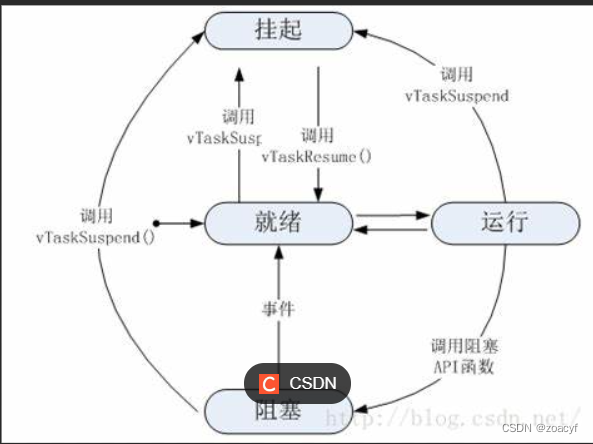
总结:
1. 仅就绪态可转变成运行态
2. 其他状态的任务想运行,必须先转变成就绪态
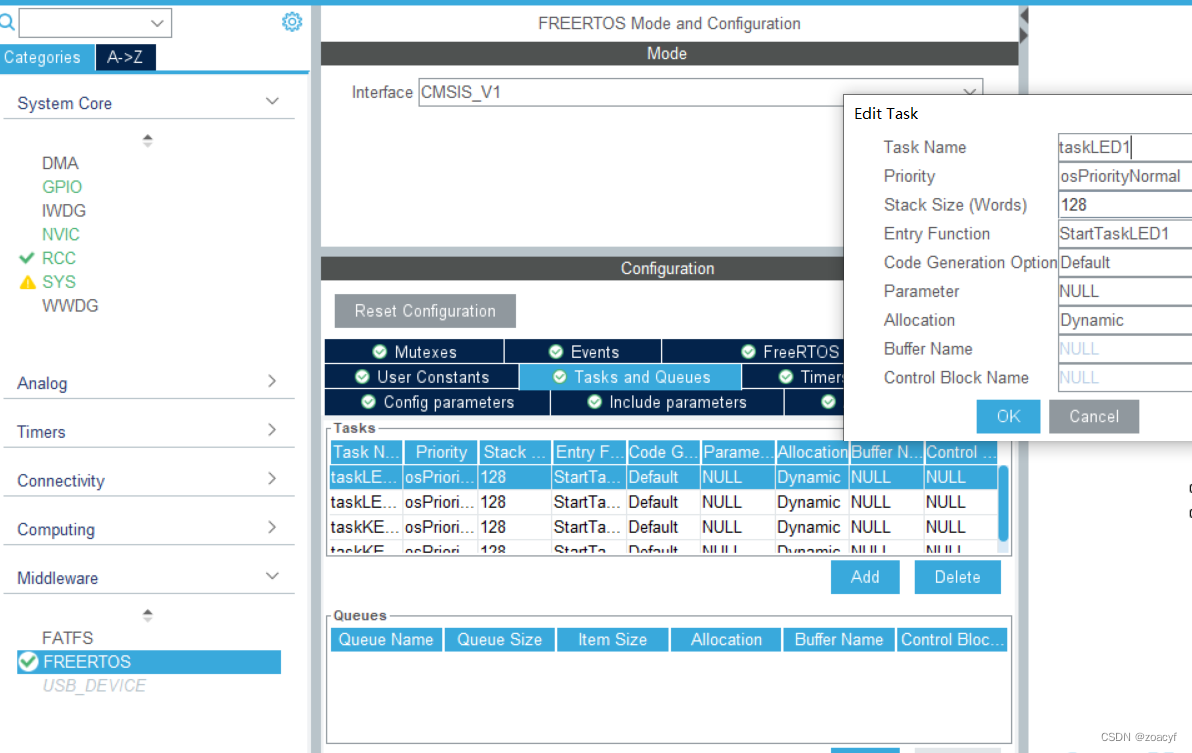
任务综合小实验
实验需求 创建 4 个任务:taskLED1,taskLED2,taskKEY1,taskKEY2,
任务要求如下:
taskLED1:间隔 500ms 闪烁 LED1;
taskLED2:间隔 1000ms 闪烁 LED2;
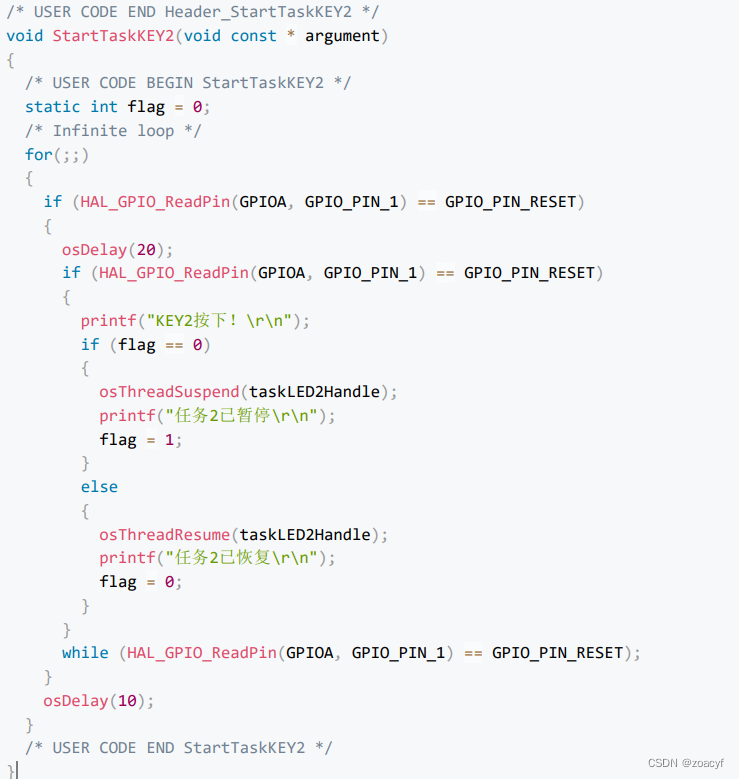
taskKEY1:如果 taskLED1 存在,则按下 KEY1 后删除 taskLED1 ,否则创建 taskLED1 ; taskKEY2:如果 taskLED2 正常运行,则按下 KEY2 后挂起 taskLED2 ,否则恢复 taskLED2
cubeMX配置
代码实现