rosserial通信向ros写调用过程如下:
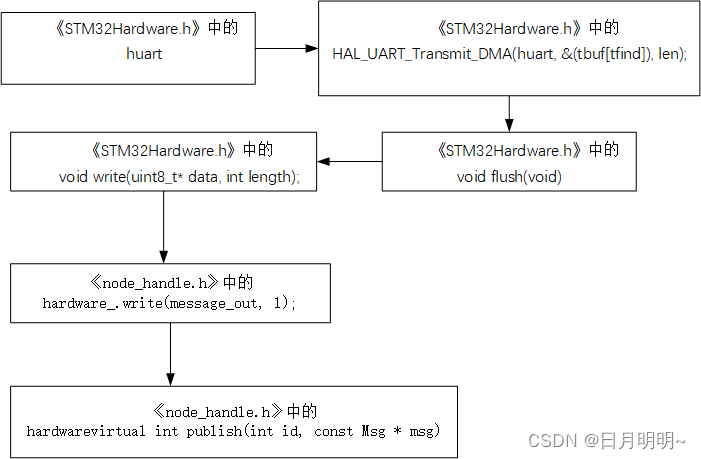
在32单片机中,发布者调用publish函数,然后依次逆向(上图是分析过程;调用过程逆向)查看上图, 最终操作串口,向上位机发布数据进行通信。
rosserial通信读取数据调用过程如下:

rosserial通信向ros写调用过程如下:
在32单片机中,发布者调用publish函数,然后依次逆向(上图是分析过程;调用过程逆向)查看上图, 最终操作串口,向上位机发布数据进行通信。
rosserial通信读取数据调用过程如下:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/738485.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!











![[Docker] Docker学习和基本配置部署(一)](https://img-blog.csdnimg.cn/5ccf742ebdcc4c9da18c17cbbe1af176.png#pic_center)