这节的内容比较简单,主要配合习题来看。
在掌握方法以后,对常规的有许多移动副或转动副结构组成的机械臂,计算正向运动学则非常简单。
齐次变换法:
这种方法的特点是,只研究当前关节和上一个关节的旋转平移,然后用下标相乘原则把它合起来。
![]()
这个内容在具体实现上,其实可以再扩展为: T = T01*R01*T12*R12*T23*R23*T34
那么上面的T01,就是前一章中所讲的,在1关节的转角为0度的时候,从base系到1关节系,直接裸写得到的旋转和平移矩阵。(参见刚体运动这节【现代机器人学】学习笔记二:刚体运动_zkk9527的博客-CSDN博客,1关节系在base系下的表示)相当于从0系,移动到了1系。然后这时到达了1系,就可以沿1系的转轴进行旋转了,那么这就属于在body系下进行旋转,所以进行右乘。绕哪个轴转,就写出对应的旋转矩阵。其他同理。
旋量指数积法:
相对于基坐标系的螺旋轴:
一个重要前提:近的关节运动会带动远的关节运动。所以要从远及近运动。
相对于基坐标系算末端,假设末端初始为M,那么根据上述前提,就需要从靠近末端的关节开始转。这时这个旋转关节就相当于space系,末端相当于body系,既然是在space系下进行旋转,那么就是左乘。所以就是最终结果就是:
那么就看这个中间计算的旋量如何得到的。实际上这里也不是旋量
,它是螺旋轴
。注意实际上
,(注意是
,是延轴的瞬时角速度,而不是指数积上面的角度)而
回顾:
回顾上节:什么是旋量?比如
,那么其中的[w,v]就构成旋量V_s。w就是转轴。
这些容易忘记或记混的东西就要反复,循环的回顾记忆。
回到上面的计算过程:
旋转关节:
1.首先,把机械臂统一都拉到零位,得到末端相对于基坐标系的表示M。
然后盯着space系,根据各个关节轴,看看关节轴在space系下是怎么归一化表示的:例如关节轴转动的那个轴,在space系下是z轴的方向,那么S中的w就是(0,0,1),其他同理。
2.得到关节轴后,根据,计算v,这里q是关节转轴上任意一点在基坐标系下的度量。
3.计算得到[w,v]以后,根据螺旋轴的求hat操作:
然后代入上面的T公式中,就是这个关节的转角。
移动关节:
1.移动副,则直接代入w就是0。那么v在这里就是关节轴正向的单位向量在基坐标系下的度量, 代表移动的距离。
2.采用上述相同的对螺旋轴求hat的操作,然后代入T公式。
回顾:
在这个公式中,h表示截距(延轴方向的线速度/角速度),但是对移动副而言,没有角速度,所以h会无限大。所以对于移动副,从旋量到螺旋轴的过程,就是
,相当于只对旋量的v进行归一化,那么作用在现在这里,就是关节轴正向的单位向量在基坐标系下的度量。
对于转动副而言,为什么没有后一项了,只剩下前一项?原因也类似,因为转动副没有沿轴方向的线速度。
相对于末端坐标系的螺旋轴:
依据从远及近运动的原则,既然是相对末端系,所以M如果代表space系,1关节此时就代表body系。既然是在body系下旋转,因此就是右乘,所以上面的公式变为:
这里和上面相对于基坐标系的公式相比,看似S变成了B,这里的S和B其实都是螺旋轴,这里之所以叫B,是因为指的是相对末端body坐标系。
计算方法和相对基坐标系的一样,只不过这里确定w和v的时候,都是先拉成机械臂的零位,然后以body系作为参考,从而确定轴的方向。
注意:不管是“相对于基坐标系的螺旋轴”,还是“相对于末端坐标系的螺旋轴”,两种方式计算出来的都是前向运动学的结果,即末端相对于基坐标系的表示。
方法名称中的“相对于基坐标系”或“相对末端坐标系”都是指的是计算中用到的“螺旋轴”是用的哪个坐标系的螺旋轴,可绝对不可以理解为计算出的FK的结果是“相对于基坐标系”(末端相对于base)或“相对于末端坐标系”(base相对于末端)。
FK的结果就是末端相对于base的表示。
插入知识点:
7轴机械臂,额外的第7个关节表示机器人完成末端任务是冗余的,这个额外的自由度可以用于避障或优化某一目标函数,例如满足所需末端位形的前提下功率最小。
PoE方法的好处在于,中间坐标系究竟是怎么样的,可以完全不考虑。爱怎么样就怎么样,只要指定基坐标系和末端坐标系就可以了。
DH表示法
DH表示法是一种传统的表示法,有四个参数:
:连杆长度,就是两个轴之间公垂线的长度。(不一定是真实两杆的长度)
:连杆扭转角,可以理解为,如果沿着上面的
,把两个连杆相交以后,再沿着公垂线转多少度,就可以使得两个关节轴完全重合。
注意,这两个的下标是i-1,其意味着在推公式,列DH表格的时候,表格的行数从1开始写,并且写的时候,要看从0坐标系出发经过怎么样才能到1坐标系。
连杆偏距 :两轴重合后,沿着轴的方向平移多少,就可以使原点重合。
关节转角 :两轴原点重合后,旧的轴需要旋转多少,就可以和新的轴的角度保持一致。
注意,这两个的下标是i,意味着,在列DH表格的时候,算它俩的时候,上一个轴已经沿着x轴挪到了当前轴上,z轴已经重合了。
如果是移动副,连杆偏距
是变量;如果是转动副,关节转角
是变量。
对于DH参数中,英文字母表示的是距离,希腊字母表示的是夹角。
DH表示法需要事先把所有的关节的坐标系都确定下来。即:先定坐标系,再定DH参数。
1.根据先把所有的z轴都确定。选好基坐标系和末端坐标系,基坐标系尽可能和杆1的连杆坐标重合,末端坐标系尽可能选在末端执行器的某处。
2.再确定x轴,方向是从当前z轴指向下一个z轴。(如果z轴相交或平行,则多种可能性,自己指定一个x轴的朝向即可)
3.根据右手定则,确定y轴。(不过DH法,定不定y轴其实也没啥用)
4.写DH表,确定移动副和转动副的变量。(注意,关节转角是,旧的轴先转某个角度,和新的轴的零位重合了,再加上新的轴可以转的角度。连杆偏距也是同理,不能说这俩就是把新轴的变量塞上去就可以了)
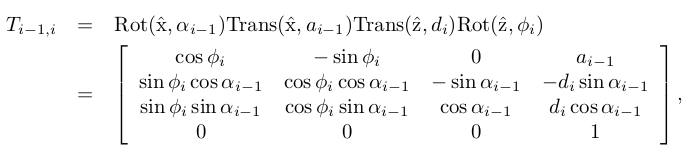
总结:DH就是分为四部:
先沿着公垂线平移(沿x轴平移),再沿着公垂线旋转(沿x轴旋转),再沿z轴平移,再沿z轴旋转。
首先从公垂线开始,公垂线是DH中最重要的参数,所以由它开始,平移完,才开始转。辅助记忆:字母表中a是第一个,所以DH中从a开始。
因为都是沿着操作以后的轴进行下一步操作,所以相关操作一律是右乘:
DH法的优点在于,仅用4个参数就表示了六自由度的内容。这个是因为它设立了特殊的坐标系表示,只沿着x和z平移旋转,而和y无关。
但这也是缺点,需要好好的设置坐标系才可以,搞起来比较麻烦。所以设置坐标系的时候,末端要小心,避免导致DH算不出来,需要沿y轴操作事情发生。。另外DH的缺点是可能存在病态问题,相邻两关节轴平行的时候,一点点误差就会导致公垂线的巨大变化。
书中讲:对开链运动学的FK来说,DH几乎没有实际价值。(晕,那你讲它干什么??)
不过另一本比较经典的《机器人学导论》中,却只有DH表示法。另外在日常工作中,也经常听到其他同事,包括机械专业、控制专业的同学提到DH表示法,目前我司的机器人的FK貌似就是用的DH算的。。这块不是我负责,改天确认一下。。不同机器人出厂进行参数标定的时候,就是有一些dh参数的标定,不同机器人不太一样。所以我认为这里好像也并不是像书中说的,DH完全没有价值。我个人认为这是流派之争,捧一踩一。。聊天的时候,他们说起来也会说:“他们搞旋量的那帮人....”
POE和DH的关系:
这个因为四项相乘当中,移动副或者转动副,都会有三个是常数项,剩下的那一项也可以用Poe表示一下,最后各个关节都这样表示,化简到最后,就是POE公式。。


![[附源码]Python计算机毕业设计Django游戏交易平台](https://img-blog.csdnimg.cn/739416166e1247dabea1e6517c9c2e17.png)