目录
- 前言
- 1. 核函数
- 2. 核函数案例
- 总结
前言
杜老师推出的 tensorRT从零起步高性能部署 课程,之前有看过一遍,但是没有做笔记,很多东西也忘了。这次重新撸一遍,顺便记记笔记。
本次课程学习精简 CUDA 教程-核函数
课程大纲可看下面的思维导图

1. 核函数
关于核函数你需要知道:
核函数是 cuda 编程的关键
通过 xxx.cu 创建一个 cudac 程序文件,并把 cu 交给 nvcc 编译,才能识别 cuda 语法
- nvcc 是 nvidia 的一个 c++ 编译器,是用来编译 cudac 程序的
__global__表示为核函数,由 host 调用。
__deivce__表示为设备函数,由 device 调用
__host__表示为主机函数,由 host 调用。__shared__表示变量为共享变量
- 一个函数可以既是设备函数又是主机函数,可以同时被
__device__ __host__修饰host 调用核函数:function<<<gridDim,blockDim,sharedMemorySize,stream>>>(args…)
- stream 是上节课提到的流,在进行异步管理的时候可以控制它。sharedMemorySize 是共享内存的大小
- gridDim 和 blockDim 用于告诉核函数该启动多少个线程,二者都是内置变量,其变量类型是 dim3
- 启动的总线程数量 nthreads = gridDim.x * gridDim.y * gridDim.z * blockDim.x * blockDim.y * blockDim.z
- gridDim 和 blockDim 都是有约束的,可以通过 runtime API 或者 deviceQuery 进行查询。gridDims(21亿,65536,65536),blockDim(1024,64,64) blockDim.x * blockDim.y * blockDim.z <= 1024
只有
__global__修饰的函数才可以 <<<>>> 的方式调用调用核函数是传值的,不能传引用,可以传递类、结构体等,核函数可以是模板,返回值必须是 void
核函数的执行,是异步的,也就是立即返回的
线程 layout 主要用到 blockDim、gridDim
核函数内访问线程索引主要用到 threadIdx、blockIdx、blockDim、gridDim 这些内置变量
我们之前有提到将 host 即 CPU 上的数据拷贝到 device 即 GPU 上,目的是什么呢?目的当然是利用 GPU 的高性能并行计算能力,那具体怎么在 GPU 上利用这些数据来完成指定的计算呢?这就需要你来调用 CUDA 中的核函数 (kernel) 来执行并行计算。
kernel 是 CUDA 编程中一个重要的概念,指的是在 device 上线程并行执行的函数,核函数使用 __global__ 符号声明,在调用时使用 <<<grid, block>>> 来指定核函数 kernel 要执行的线程数量,在 CUDA 中的每一个线程都要执行核函数,并且每个线程会分配一个唯一的 线程号 thread ID,这个 ID 值可以通过核函数内置变量 threadIdx 来获得。
由于 GPU 实际上是异构模型,所以需要区分 host 和 device 上的代码,在 CUDA 中我们是通过函数类型限定词来区分 host 和 device 上的函数,主要有三个函数类型限定词:
- __global__ 表示核函数,在 device 上执行,由 host 调用,返回类型必须是 void
- __device__ 表示设备函数,在 device 上执行,仅可以从 device 调用
- __host__ 表示主机函数,仅可以从 host 上调用
要深刻理核函数,必须要对其的线程层级结构有一个清晰的认识。
首先 GPU 上有很多并行化的轻量级线程,kernel 在 device 上执行时实际上是启动了很多线程,一个 kernel 所启动的所有线程称为一个网格(grid),同一个网格上的所有线程共享相同的全局内存空间,grid 是线程结构的第一层次。而网格 grid 又可以分为很多线程块(block),一个线程块里面包含很多线程,这是第二个层次。
线程两层组织结构如 图1-1 所示,从图中可以看出这是一个 grid 和 block 均为 2-dim 的线程组织。那 2-dim 又是什么意思呢?这就不得不提 grid 和 block 变量类型了,grid 和 block 其实都是定义在 dim3 类型的变量,而 dim3 可以看成是包含三个无符号整数 (x,y,z) 成员的结构体变量,在定义时,缺省值初始化为 1。

因此 grid 和 block 可以灵活地定义为 1-dim,2-dim 以及 3-dim 结构,正常 2-dim 线程结构是比较常用的,对于 图1-2 的线程组织结构而言,grid 和 block 的定义可以如下:
dim3 grid(3, 2);
dim3 block(5, 3);
kernel_func<<<grid, block>>>(params, ...);
值得注意的是,核函数在调用时必须通过执行配置 <<<gird,block>>> 来指定 kernel 所使用的线程数及线程结构。
所以,一个线程需要两个内置变量(blockIdx,threadIdx)来唯一标识,它们都是 dim3 类型的变量,其中 blockIdx 指明了该线程在 grid 网格中的位置,而 threadIdx 指明了该线程在 block 中的位置,在 图xxx 中的 Thread(1,1) 满足:
threadIdx.x = 1
threadIdx.y = 1
blockIdx.x = 1
blockIdx.y = 1
有时候,我们还想要知道一个线程在线程块(block)中的全局 ID,此时就必须还要知道 block 的组织结构,这是通过线程的内置变量 blockDim 来获得。它获取线程块(block)各个维度的大小,对于一个 2-dim 的 block( D x , D y D_x,D_y Dx,Dy),线程 ( x , y x,y x,y) 的 ID 值为 ( x + y ∗ D x x+y*D_x x+y∗Dx),如果是 3-dim 的 block( D x , D y , D z D_x,D_y,D_z Dx,Dy,Dz),线程 ( x , y , z x,y,z x,y,z)的 ID 值为 ( x + y ∗ D x + z ∗ D x ∗ D y x+y*D_x+z*D_x*D_y x+y∗Dx+z∗Dx∗Dy)。另外线程还有内置变量 gridDim,用于获得网格块各个维度的大小。
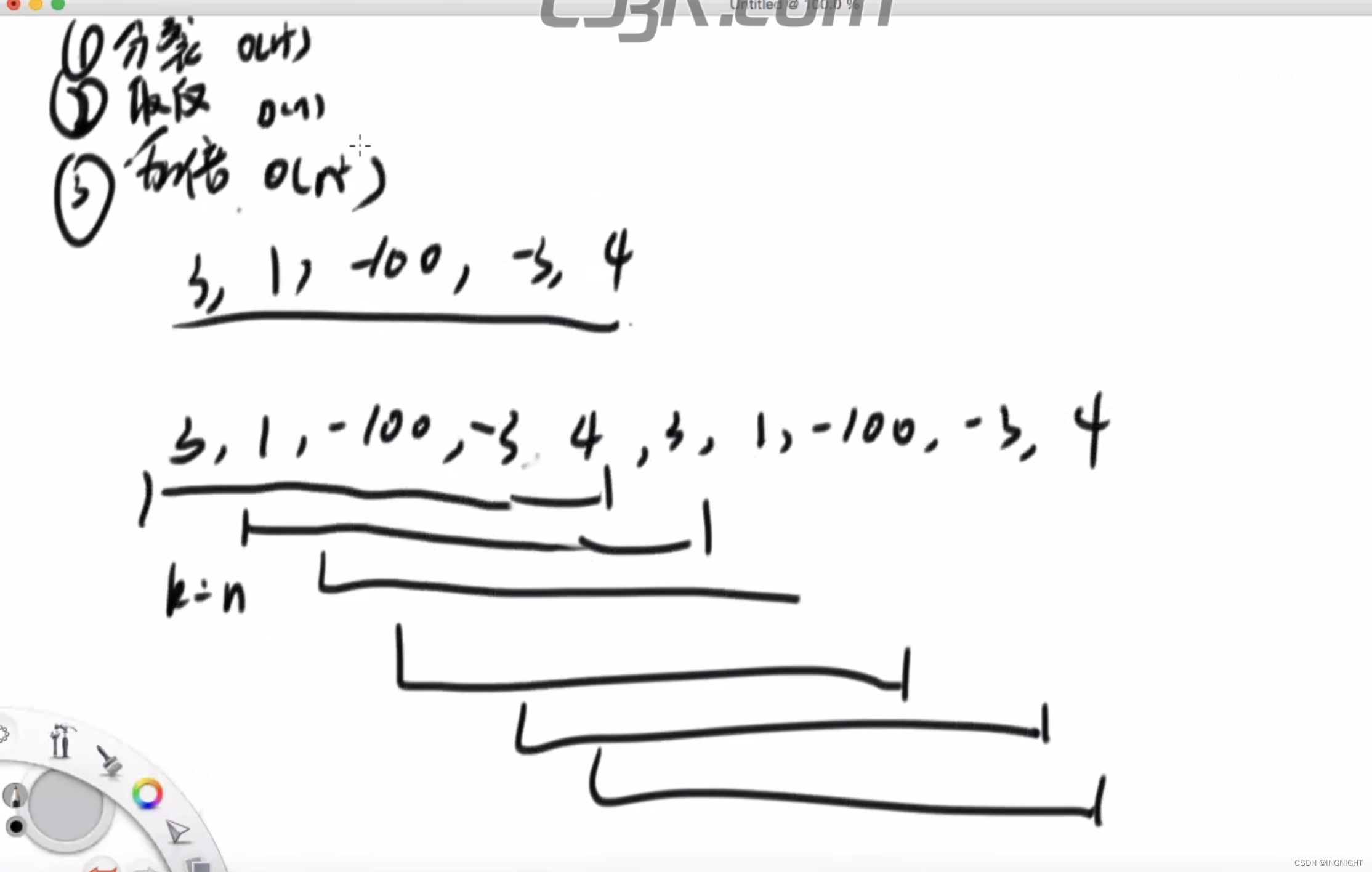
如果你还想要知道当前线程在所有线程中的即网格(grid)中的全局 ID,我们就需要同时用到 gridDim 和 blockDim,根据杜老师的方法可以很简单的计算出对应的全局 ID,具体如下图所示:

在核函数里,可以把 blockDim、gridDim 看作 shape,把 threadIdx、blockIdx 看作 index,对于全局索引的计算有个方便的记忆办法就是左乘右加,之后无论 tensor 维度有多复杂,这个方法都适用。而线程的全局索引通常会映射到指针的偏移量上,方便我们后续的操作
我们拿个简单的例子来说明,假设 grid(2,1,1) blockDim(1,1,10)

按照左乘右加准则,则 idx = blockIdx.x * blockDim.x + threadIdx.x
一个线程块(block)上的线程是放在同一个**流式多处理器(streaming Multi-processor,SM)**上的,但是单个 SM 的资源是有限的,这导致线程块(block)中的线程数是有限的,现代 GPU 的线程数可支持的线程数可达 1024 个。
kernel 核函数在执行时实际上会启动很多线程,这些线程在逻辑上是并行的,但是在物理层不一定。GPU 硬件的一个核心组件就是 SM,当一个 kernel 核函数被执行时,它的 grid 中的线程块就被分配到 SM 上。一个线程块只能在一个 SM 上被调度,而一个 SM 一般可以调度多个线程块,这要看 SM 本身能力。一个 kernel 的各个线程块被分配到多个 SM,因此 grid 只是逻辑层,而 SM 才是执行的物理层,如图1-4所示。
SM 的基本执行单元是线程束(warps),线程束包含 32 个线程,但是一个 SM 的同时并发的线程束数是有限的。总之,就是网格和线程块只是逻辑划分,一个 kernel 的所有线程其实在物理层不一定同时并发的。所以,kernel 的 grid 和 block 的配置不同,性能会出现差异。还要注意,由于 SM 的基本执行单元是包含 32 个线程的线程束,所以 block 大小一般要设置为 32 的倍数。

2. 核函数案例
核函数案例的 main.cpp 示例代码如下:
#include <cuda_runtime.h>
#include <stdio.h>
#define checkRuntime(op) __check_cuda_runtime((op), #op, __FILE__, __LINE__)
bool __check_cuda_runtime(cudaError_t code, const char* op, const char* file, int line){
if(code != cudaSuccess){
const char* err_name = cudaGetErrorName(code);
const char* err_message = cudaGetErrorString(code);
printf("runtime error %s:%d %s failed. \n code = %s, message = %s\n", file, line, op, err_name, err_message);
return false;
}
return true;
}
void test_print(const float* pdata, int ndata);
int main(){
float* parray_host = nullptr;
float* parray_device = nullptr;
int narray = 10;
int array_bytes = sizeof(float) * narray;
parray_host = new float[narray];
checkRuntime(cudaMalloc(&parray_device, array_bytes));
for(int i = 0; i < narray; ++i)
parray_host[i] = i;
checkRuntime(cudaMemcpy(parray_device, parray_host, array_bytes, cudaMemcpyHostToDevice));
test_print(parray_device, narray);
checkRuntime(cudaDeviceSynchronize());
checkRuntime(cudaFree(parray_device));
delete[] parray_host;
return 0;
}
核函数案例的 kernel.cu 示例代码如下:
#include <stdio.h>
#include <cuda_runtime.h>
__global__ void test_print_kernel(const float* pdata, int ndata){
int idx = threadIdx.x + blockIdx.x * blockDim.x;
/* dims indexs
gridDim.z blockIdx.z
gridDim.y blockIdx.y
gridDim.x blockIdx.x
blockDim.z threadIdx.z
blockDim.y threadIdx.y
blockDim.x threadIdx.x
Pseudo code:
position = 0
for i in 6:
position *= dims[i]
position += indexs[i]
*/
printf("Element[%d] = %f, threadIdx.x=%d, blockIdx.x=%d, blockDim.x=%d\n", idx, pdata[idx], threadIdx.x, blockIdx.x, blockDim.x);
}
void test_print(const float* pdata, int ndata){
// <<<gridDim, blockDim, bytes_of_shared_memory, stream>>>
test_print_kernel<<<1, ndata, 0, nullptr>>>(pdata, ndata);
// 在核函数执行结束后,通过cudaPeekAtLastError获取得到的代码,来知道是否出现错误
// cudaPeekAtLastError和cudaGetLastError都可以获取得到错误代码
// cudaGetLastError是获取错误代码并清除掉,也就是再一次执行cudaGetLastError获取的会是success
// 而cudaPeekAtLastError是获取当前错误,但是再一次执行 cudaPeekAtLastError 或者 cudaGetLastError 拿到的还是那个错
// cuda的错误会传递,如果这里出错了,不移除。那么后续的任意api的返回值都会是这个错误,都会失败
cudaError_t code = cudaPeekAtLastError();
if(code != cudaSuccess){
const char* err_name = cudaGetErrorName(code);
const char* err_message = cudaGetErrorString(code);
printf("kernel error %s:%d test_print_kernel failed. \n code = %s, message = %s\n", __FILE__, __LINE__, err_name, err_message);
}
}
运行效果如下:

这个案例展示了如何在 CUDA 中使用核函数进行并行计算。
test_print_kernel 是一个 __global__ 修饰符标记的核函数,它将在 GPU 上执行,并由 host 调用。核函数的作用是打印传入数据数组的每个元素的值以及线程索引、块索引和块大小等信息。test_print 为主机函数负责调用核函数,<<<1, ndata, 0, nullptr>>> 是启动核函数的语法,其中 1 是块(block)的数量,ndata 是每个块中的线程(thread)数量,0 表示共享内存大小,nullptr 表示使用默认的流(stream)。
在核函数执行结束后,使用 cudaPeekAtLastError 检查是否有错误发生。如果有错误,将打印错误代码和消息。值得注意的是 cudaPeekAtLastError 和 cudaGetLastError 都可以获取得到错误代码,cudaGetLastError 是获取错误代码并清除掉,也就是再一次执行 cudaGetLastError 获取的会是 success。而 cudaPeekAtLastError 是获取当前错误,但是再一次执行 cudaPeekAtLastError 或者 cudaGetLastError 拿到的还是那个错误。cuda 的错误会传递,如果这里出错了,不移除,那么后续的任意 api 的返回值都会是这个错误,都会失败。
通过这个案例,可以了解如何定义和启动核函数,并使用线程索引、块索引和块大小等信息来实现并行计算。在实际应用中,可以根据需要编写更复杂的核函数来处理实际计算任务。
关于核函数的知识点如下:(from 杜老师)
- cu 文件一般是用来写 cuda 的核函数
- 在 .vscode/setting.json 中配置
*.cu : cuda-cpp,可以使得代码被正确解析- Makefile 中,cu 交给 nvcc 进行编译
- cu 文件可以当作正常 cpp 写即可,它是 cpp 的超集,兼容支持 cpp 的所有特性
- cu 文件中引入了一些新的符号和语法
__global__标记,核函数标记
- 调用方必须是 host
- 返回值必须是 void
- 例如:
__global__ void kernel(const float* pdata, int ndata)- 核函数必须以
kernel<<<gridDim, blockDim, bytesSharedMemorySize, stream>>>(pdata, ndata)的方式启动- 其参数类型是:
<<<dim3 gridDim, dim3 blockDim, size_t bytesSharedMemorySize, cudaStream_t stream>>>- dim3 有默认构造函数 dim3(int x, int y=1, int z=1)
- 因此当直接赋值为 int 时,实则定义了 dim.x = value, dim.y = 1, dim.z = 1
- 其中 gridDim,blockDim,bytesSharedMemory,stream 是线程 layout 参数
- 如果指定了 stream,则把核函数加入到 stream 中异步执行
- pdata 和 data 则是核函数的函数调用参数
- 函数调用参数必须传值,不能传引用等。参数可以是类类型等
- 核函数的执行无论 stream 是否为 nullptr,都将是异步执行
- 因此在核函数中进行 printf 操作,你必须进行等待,例如 cudaDeviceSynchronize 或者 cudaStreamSynchronize,否则你将无法看到打印的信息
__device__标记,设备调用的函数
- 调用方必须是 device
__host__标记,主机调用的函数
- 调用方必须是主机
- 也可以
__deivce__ __host__两个标记同时有,表明该函数可以设备也可以主机__constant__标记,定义常量内存__shared__标记,定义共享内存
- 通过 cudaPeekAtLastError/cudaGetLastError 函数,可以捕获核函数是否出现错误或异常
- 内存索引的计算公式
position = 0 for i in range(6): position *= dims[i] position += indexs[i]
buildin 变量,即内置变量,通过 ctrl+鼠标左键点进去查看定义位置
- 所有核函数都可以访问,其取值由执行器维护和改变
- gridDim[x, y, z]:网格维度,线程布局的大小,是核函数启动时指定的
- blockDim[x, y, z]:块维度,线程布局的大小,是核函数启动时指定的
- blockIdx[x, y, z]:块索引,对应最大值是 gridDim,由执行器根据当前执行的线程进行赋值,核函数内访问时已经被配置好
- threadIdx[x, y, z]:线程索引,对应最大值是 blockDim,由执行器根据当前执行的线程进行赋值,核函数内访问时已经被配置好
- Dim 是固定的,启动后不会改变,并且是 Idx 的最大值
- 每个都具有 x、y、z 三个维度,分别以 z、y、x 为高低顺序
关于 thread,grid,block 和 threadIdx 概念
- 首先,我们可以先不严谨地认为,GPU 相当于一个立方体,这个立方体有很多小方块如下图
- 每个小块都是一个 thread,为了方便讨论,我们只考虑 2D 的,如下图
- 我们关心的是某一个 thread 的位置,比如上图中的黄色方块
- 它在 2D 的位置是 (blockIdx.x, blockIdx.y, threadIdx.x, threadIdx.y) = (1, 0, 1, 1)
- 如果将这个 2D 展开成 1D,这个黄色 thread 的 1D 位置就是 13
- 计算方式如下图
- 但是一般情况,为了简化问题,我们只需要用到 threadIdx.x,blockIdx.x,blockDim.x 这三个量即可,所以计算 idx 的公式如下:
- int idx = threadIdx.x + blockIdx.x * blockDim.x; 其表示的含义是要求 thread 的 1D index,先得知道在第几个 block 里,再知道在这个 block 里得第几个 thread



总结
本次课程学习了核函数,它是一个在 GPU 上并行计算的函数,由
__global__符号进行修饰说明。核函数与普通的函数不同,在调用时需要使用 <<<>grid, block>> 来指定 kernel 要启动的线程数量,而每个线程都有唯一的线程号 thread ID 来标识,关于线程的全局索引计算可以根据杜老师的方法,采用左乘右加的方式进行记忆。除此之外,我们还要对线程结构有一定的了解,一个 kernel 启动的所有线程被称为一个 grid,而一个 grid 里面又有很多的 block,一个 block 里面还包含有很多线程。grid 只是逻辑层,SM(流式处理器)才是执行的物理层,SM 的基本执行单元是 warp(线程束),每个 warp 包含 32 个线程。
最后我们写了一个简单核函数案例了解了核函数的定义和启动,并使用 threadIdx、blockIdx、blockDim 等信息来实现并行计算。
标识,关于线程的全局索引计算可以根据杜老师的方法,采用左乘右加的方式进行记忆。