门电路与D触发器
一、与门
1.基本定义
与门又称 “与电路”、逻辑“积”、逻辑“与”电路,是执行“与”运算的基本逻辑门电路。有多个输入端,一个输出端。当所有的输入同时为高电平(逻辑1)时,输出才为高电平,否则输出为低电平(逻辑0)。

2.真值表

3.实现方法
① 晶体管实现

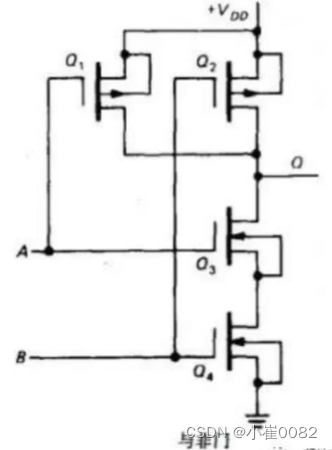
② CMOS管实现

O1与O2为PMOS管,O3与O4为NMOS管。
从上图可以看出,与门由两级电路构成,且用的器件较多,即影响速度又降低集成度,所以用与非门多。
4.集成电路
74LS21:

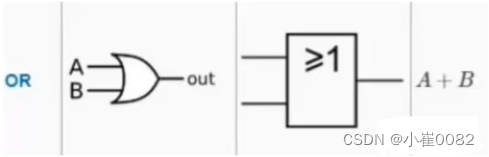
二、或门
1.基本定义
或门,又称或电路、逻辑和电路,是执行“或”运算的基本逻辑门电路。或门有多个输入端,一个输出端,只要输入中有一个为高电平时(逻辑“1”),输出就为高电平;只有当所有的输入全为低电平(逻辑“0”)时,输出才为低电平。
2.真值表

3.实现方法
① 晶体管实现

② CMOS管实现

从上图可以看出,或门由两级电路构成,且用的器件较多,即影响速度又降低集成度,所以用或非门多。
4.集成电路
74IS32:


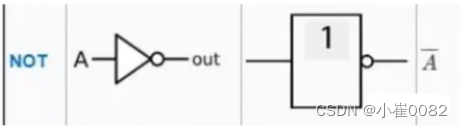
三、非门
1.基本定义
非门又称非电路、反相器,是执行“非”运算的基本逻辑门电。非门有一个输入和一个输出端。当其输入端为高电平(逻辑1)时输出端为低电平(逻辑门),反之亦然。
2.真值表

3.实现方法
① 晶体管实现

② CMOS实现

4.集成电路
74LS04:

四、与非,或非
1.与非门
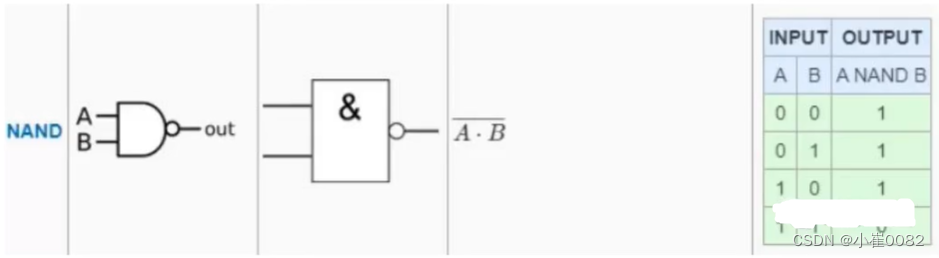
任何一个有低电平,O3与O4均为截止状态,O1与O2导通,O输出高电平。

输入级, 主要用于一些防干扰的措施;中间级,主要是一些放大;输出级,主要是一些功率的放大。
2.或非门


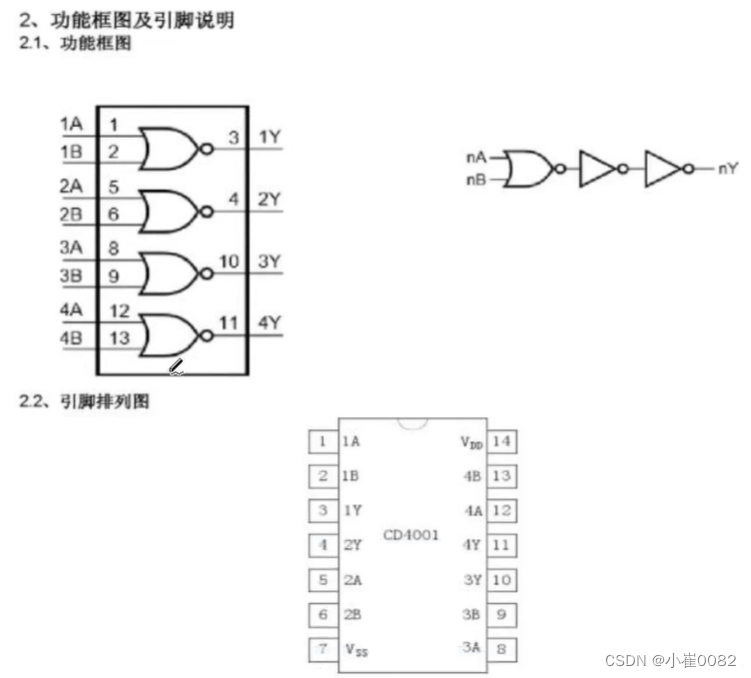
五、异或,同或
1.异或门
异或门是数字逻辑中实现逻辑异或的逻辑门,有2个输入端、1个输出端。若两个输入的电平相异,则输出为高电平1;若两个输入的电平相同,则输出为低电平0。

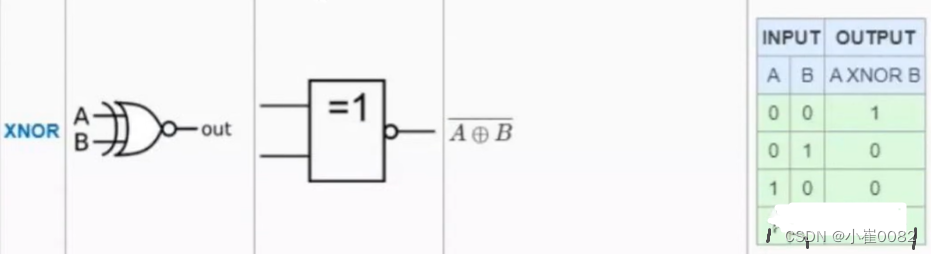
2.同或门
同或门是数字逻辑中实现逻辑同或的逻辑门,有2个输入端、1个输出端。若两个输入的电平相同,则输出为高电平1;若两个输入的电平相异,则输出为低电平0。
六、D触发器

有两个输入端,分别是信号输入端D,以及时钟控制端CP,他们俩输出依然是 Q 与 。其实与RS触发器类似,不同的是将G3的与非门的一个输入端,接到了另一个与非门的输出端。
下面是RS触发器:
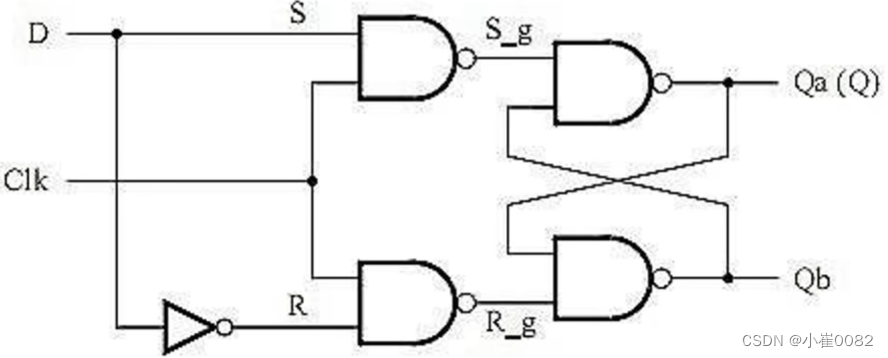
RS的输入端永远处于相反状态。对于D来说,输入是什么,输出就是什么, 不存在保持和不确定这两种状态。而时钟输入端又好比一把锁,从D这个端口存入一个数据,然后改变时钟输入端的信号,就可以锁住这个数据,起到一个锁存的作用。
对于时钟输入端这把锁,一般会有两把钥匙,通常是上升沿触发,以及下降沿触发。
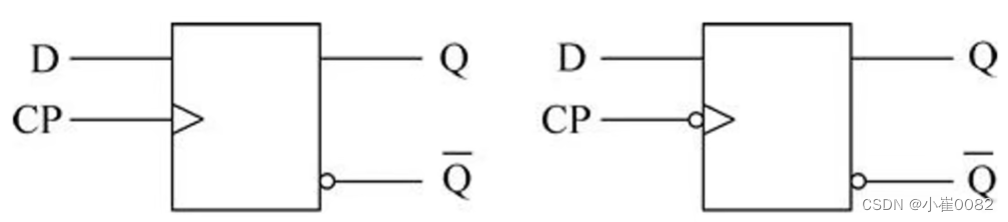
以下降沿触发为例,就是以高电平变为低电平的过程称为下降沿。

 现在D触发器的输入端为低电平,所以输出Q也为低电平。
现在D触发器的输入端为低电平,所以输出Q也为低电平。
我们将D触发器输入变成高电平:可以发现,触发器并不是立即输入高电平 ,而是等到CP信号的上升沿到达时,才发生的变化。

七、RS触发器
1.与非门RS触发器

最基础的由与非门构成的RS触发器。 基础RS触发器分为两种:由与非门构成的和或非门构成的。
由上图知,由两个与非门交叉连接所构成,每个与非门的输出端与另一个与非门的输入端相连。与非门的RS触发器,两个输入端是S非和R非,分别对应着 Q 和 .回忆与非门的输出特点:有0出1,全1出0。也就是在电路中,在低电平到来时,他才会输出高电平,从而使触发器动作,而(只有一个)高电平到来时,不会使触发器动作。
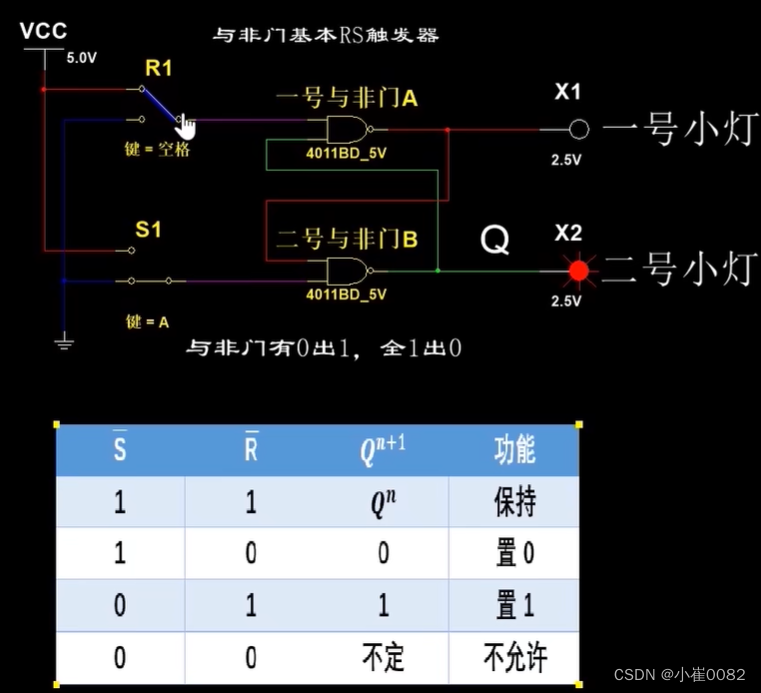
现在为高电位,不会使触发器动作,
为低电位;二号与非门输出高电位,二号小灯点亮;一号与非门全一出零,输出低电位;流到二号与非门的输入端,使二号与非门继续导通,这就使二号小灯起到置一的功能。

将 同样拨到高电位,高电位不会使触发器动作,起到了一个保持的作用。可以看到,二号小灯没有变化。

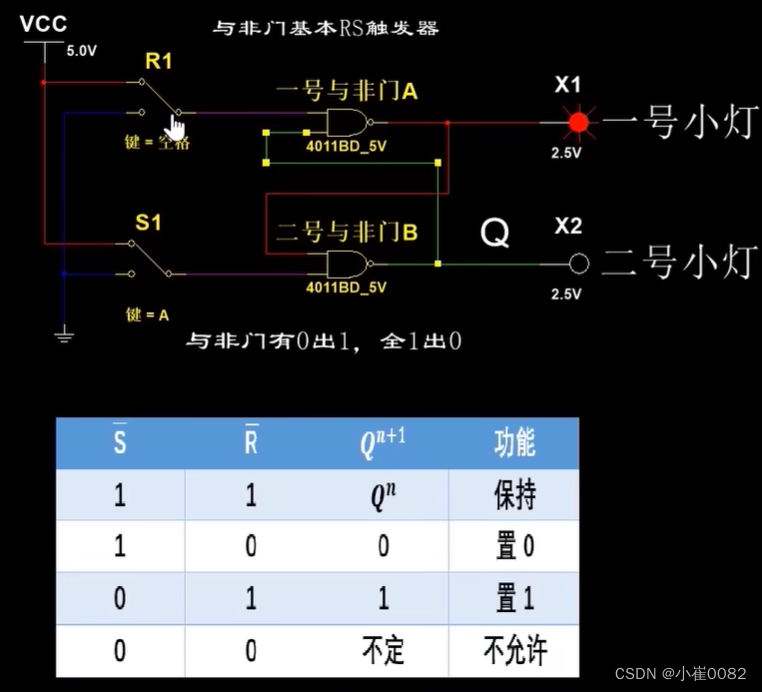
将 拨到低电位,一号小灯亮了,二号小灯熄灭。

输出低电位,一号与非门导通,一号小灯电量;二号与非门全一出零,流到一号与非门的输入端,使一号与非门继续导通,这就起到了使二号小灯置零的功能。
现在将 拨到高电位,同样可以使电路继续保持。
在实际情况中,对于触发器,存在的状态只能是相反的,或者是互补的关系:当Q为0时,就要为1; 当Q为1时,
就要为0.
最后总结一下RS触发器的功能特点:
其具有置零,置一,以及保持的功能,而这个保持功能就是记忆功能,它可以将前一次的状态记录下来。
2.或非门RS触发器
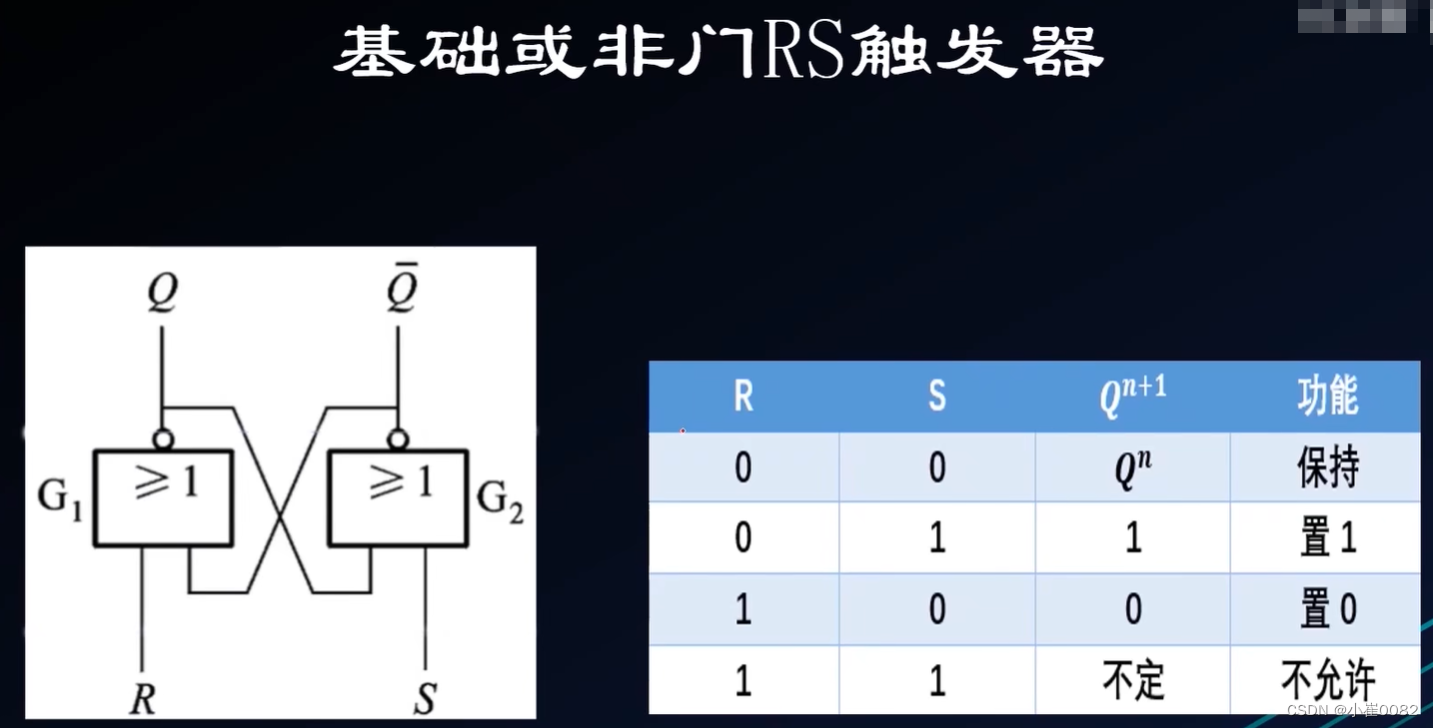
其结构简单,是由两个或非门交叉连接所构成的,每个或非门的一个输出端,连接到另一个或非门的输入端,或非门RS触发器的两个输入端是R和S,分别对应着 Q 和 。
有1出0,全0出1.在电路中,只有当高电平到来时,它才会输出低电平,从而使触发器动作,但只有一个低电平到来时,不会使触发器动作。
仿真:
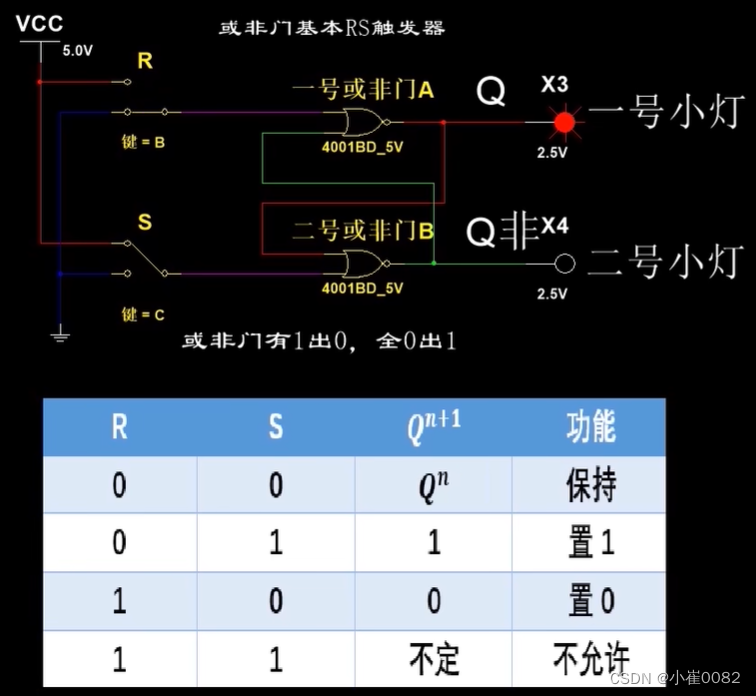
此时R为低电位,不会使触发器动作;S为高电位,二号或非门输出低电位,二号小灯熄灭,同时低电位的信号流到一号或非门的输入端,一号或非门全0出1,一号小灯点亮,使一号小灯Q提到了置一的功能。
现在将 S 拨到低电位,一个低电位无法使触发器动作,起到一个保持的作用,也可发现一号小灯没有变化。

这时把R拨到高电位,可以发现一号小灯熄灭,二号小灯点亮。这是因为R输出高电平,一号或非门输出低电平,一号小灯熄灭;同时低电平的信号流到二号或非门的输入端,二号或非门全0出1,二号小灯点亮