我们要进行垃圾回收,就需要弄明白哪些对象是需要回收的,哪些对象是不需要回收的。针对这个问题,其实业界已经有几种常见的解决方法了。
第一种是计数法
第一种是计数法,就是每个对象都有一个计数器,被引用了加一,移除引用减一。但这种方法比较麻烦,而且也会有循环依赖的问题,因此并不被广泛使用。第二种是根可达算法,即以 GCRoots 为基础去扫描整个引用链,从而找到所有的可达对象,那剩下的其他对象就是不可达的垃圾对象了。
根可达算法
现在被广泛使用的是第二种算法,即根可达算法。
那怎么去实现根可达算法呢?
标记 - 清除
最简单的一种实现方案是:从 GCRoots 节点开始,使用「标记 - 清除」算法去实现。
这种实现方案分为两个阶段,分别是:标记阶段、清除阶段。在标记阶段,它从 GCRoots 节点开始扫描整个引用链,找到所有可达的对象。在清除阶段,扫描整个引用链的不可达对象,然后将垃圾对象清除掉。整个算法实现过程如下图所示。
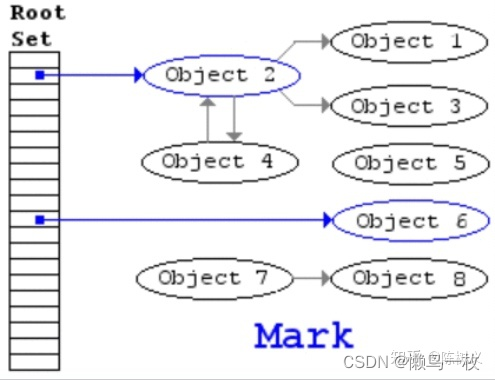
但这种方式有一个很大的缺点:整个过程必须「Stop the World」。这就导致整个应用程序必须停止,不能做任何改变,这是非常不友好的。 CMS 回收器出现之前的所有回收器,都是用这种方式实现的,因此 GC 停顿时间都比轿长。
三色标记算法
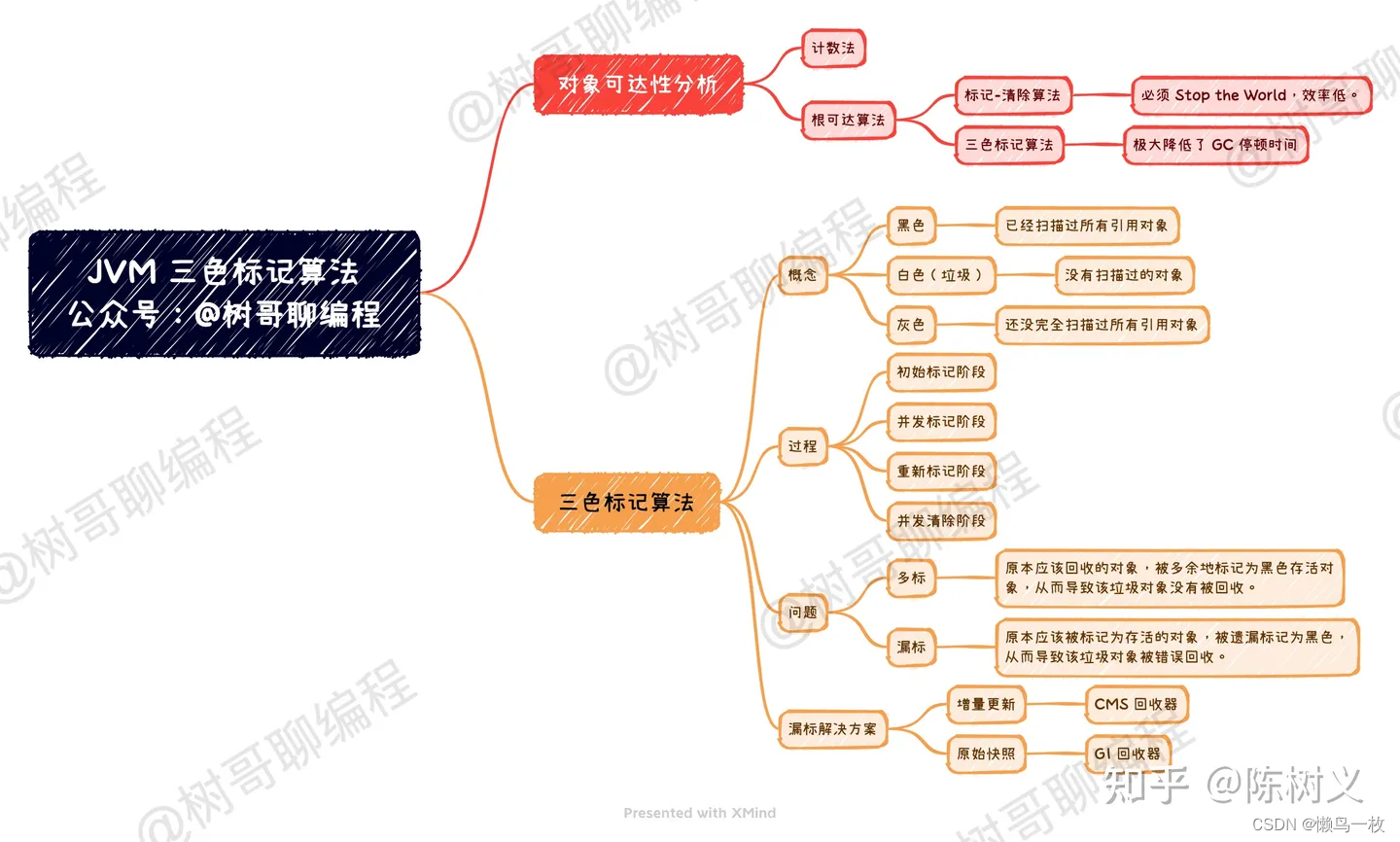
为了解决上面「标记 - 清除」算法的问题,于是就出现了「三色标记算法」!
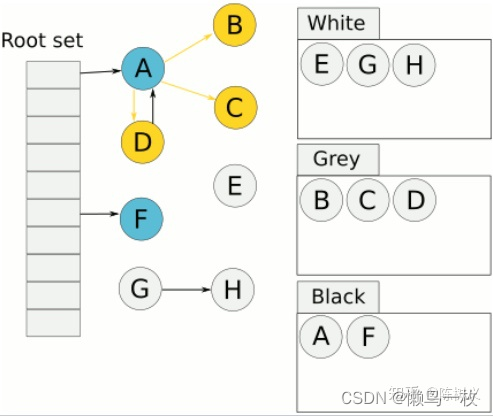
三色标记算法指的是将所有对象分为白色、黑色和灰色三种类型。黑色表示从 GCRoots 开始,已扫描过它全部引用的对象,灰色指的是扫描过对象本身,还没完全扫描过它全部引用的对象,白色指的是还没扫描过的对象。
黑色:代表该对象以及该对象下的属性全部被标记过了。(程序需要用到的对象,不应该被回收)
灰色:对象被标记了,但是该对象下的属性未被完全标记。(需要在该对象中寻找垃圾)
白色:对象未被标记(需要被清除的垃圾)
但仅仅将对象划分成三个颜色还不够,真正关键的是:实现根可达算法的时候,将整个过程拆分成了初始标记、并发标记、重新标记、并发清除四个阶段。
- 初始标记阶段,指的是标记 GCRoots 直接引用的节点,将它们标记为灰色,这个阶段需要 「Stop the World」。
- 并发标记阶段,指的是从灰色节点开始,去扫描整个引用链,然后将它们标记为黑色,这个阶段不需要「Stop the World」。
- 重新标记阶段,指的是去校正并发标记阶段的错误,这个阶段需要「Stop the World」。
- 并发清除,指的是将已经确定为垃圾的对象清除掉,这个阶段不需要「Stop the World」。
对比一下「四阶段拆分」和「一段式」的实现方式,我们可以看出:通过将最耗时的引用链扫描剥离出来作为并发标记阶段,将其与用户线程并发执行,从而极大地降低了 GC 停顿时间。 但 GC 线程与用户线程并发执行,会带来新的问题:对象引用关系可能会发生变化,有可能发生多标和漏标问题。
多标与漏标问题
多标问题指的是原本应该回收的对象,被多余地标记为黑色存活对象,从而导致该垃圾对象没有被回收。 多标问题会出现,是因为在并发标记阶段,有可能之前已经被标记为存活的对象,其引用被删除,从而变成了不可达对象。例如下图中,假设我们现在遍历到了节点 E,此时应用执行了 objD.fieldE = null;。那么此刻之后,对象 E、F、G 应该是被回收的。但因为节点 E 已经是灰色的,那么 E、F、G 节点都会被标记为存活的黑色状态,并不会被回收。
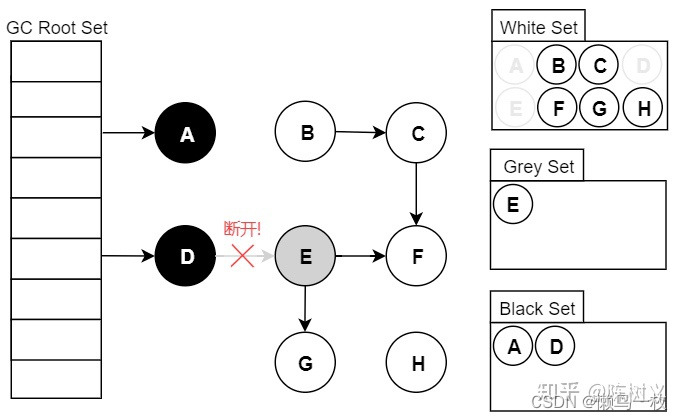
多标问题会导致内存产生浮动垃圾,但好在其可以再下次 GC 的时候被回收,因此问题还不算很严重。
漏标问题指的是原本应该被标记为存活的对象,被遗漏标记为黑色,从而导致该垃圾对象被错误回收。 例如下图中,假设我们现在遍历到了节点 E,此时应用执行如下代码。这时候因为 E 对象没有引用了 G 对象,因此扫描 E 对象的时候并不会将 G 对象标记为黑色存活状态。但由于用户线程的 D 对象引用了 G 对象,这时候 G 对象应该是存活的,应该标记为黑色。但由于 D 对象已经被扫描过了,不会再次扫描,因此 G 对象就被漏标了。
var G = objE.fieldG; objE.fieldG = null; // 灰色E 断开引用 白色G
objD.fieldG = G; // 黑色D 引用 白色G
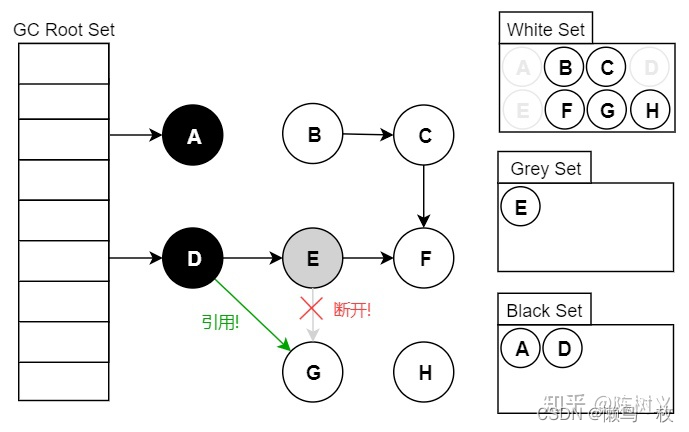
漏标问题就非常严重了,其会导致存活对象被回收,会严重影响程序功能。
那么我们的垃圾回收器是怎么解决这个问题的呢?
答案是:增加一个「重新标记」阶段。无论是在 CMS 回收器还是 G1 回收器,它们都在并发标记阶段之后,新增了一个「重新标记」阶段来校正「并发标记」阶段出现的问题。 只是对于 CMS 回收器和 G1 回收器来说,它们解决的原理不同罢了。
漏标解决方案
正如前面所说,三色标记算法会造成漏标和多标问题。但多标问题相对不是那么严重,而漏标问题才是最严重的。我们经过分析可以知道,漏标问题要发生需要满足如下两个充要条件:
- 有至少一个黑色对象在自己被标记之后指向了这个白色对象
- 所有的灰色对象在自己引用扫描完成之前删除了对白色对象的引用
只有当上面两个条件都满足,三色标记算法才会发生漏标的问题。换言之,如果我们破坏任何一个条件,这个白色对象就不会被漏标。这其实就产生了两种方式,分别是:增量更新、原始快照。CMS 回收器使用的增量更新方案,G1 采用的是原始快照方案。
CMS 解决方案
CMS 回收器采用的是增量更新方案,即破坏第一个条件:「有至少一个黑色对象在自己被标记之后指向了这个白色对象」。
既然有黑色对象在自己标记后,又重新指向了白色对象。那么我就把这个黑色对象的引用记录下来,在后续「重新标记」阶段再以这个黑色对象为跟,对其引用进行重新扫描。通过这种方式,被黑色对象引用的白色对象就会变成灰色,从而变为存活状态。
这种方式有个缺点,就是会重新扫描新增的这部分黑色对象,会浪费多一些时间。但是这段时间相对于并发标记整个链路的扫描,还是小巫见大巫,毕竟真正发生引用变化的黑色对象是比较少的。
G1 解决方案
G1 回收器采用的是原始快照的方案,即破坏第二个条件:「所有的灰色对象在自己引用扫描完成之前删除了对白色对象的引用」。
既然灰色对象在扫描完成后删除了对白色对象的引用,那么我是否能在灰色对象取消引用之前,先将灰色对象引用的白色对象记录下来。随后在「重新标记」阶段再以白色对象为根,对它的引用进行扫描,从而避免了漏标的问题。通过这种方式,原本漏标的对象就会被重新扫描变成灰色,从而变为存活状态。
这种方式有个缺点,就是会产生浮动垃圾。 因为当用户线程取消引用的时候,有可能是真的取消引用,对应的对象是真的要回收掉的。这时候我们通过这种方式,就会把本该回收的对象又复活了,从而导致出现浮动垃圾。但相对于本该存活的对象被回收,这个代码还是可以接受的,毕竟在下次 GC 的时候就可以回收了。
对于 CMS 和 G1 这两种处理方案哪种更好,很多资料说的是 G1 这种解决方案更好。 原因是其觉得 G1 这种方式产生了一些浮动垃圾,但节省了一些时间。但我对比了一下发现:CMS 和 G1 都需要重新对某些元素进行引用链扫描。从这点看来,好像差别不大。有弄懂的朋友可以评论区留言讨论讨论。
总结
看完了整篇文章,我们试图来回答一些问题。
三色标记算法是什么? 三色标记算法是根可达算法的一种实现方案,其目的是为了找出所有可达对象。
为什么要有三色标记算法? 因为传统的「标记 - 清除」算法效率太低,于是采用三色标记算法通过将对象分成白色、黑色、灰色,以及将整个过程拆分成「初始标记、并发标记、重新标记、并发清除」4 个过程,从而降低 GC 停顿时间。
三色标记算法有什么缺陷? 三色标记算法会产生多标和漏标问题,其中漏标问题最严重。漏标问题会导致本该存活的对象被回收,从而导致严重的程序问题。
漏标有什么解决方案? 漏标有两种解决方案,分别是:增量更新和原始快照方式。CMS 回收器采用了增量更新方式,G1 回收器采用了原始快照方式。
漏标哪种解决方案最好? 江湖传闻 G1 回收器的原始快照方式效率高,但没有确切的理论证明,且听且珍惜。