前言
halo,包子们下午好
最近世界杯不是很火呀
很多小伙伴应该都知道球赛反正买,别墅靠大海!
今天就给大家实现一个类似世界杯的足球小游戏,咱就说真的堪比国足了!
哈哈哈~ 好啦
直接开整!!!
相关文件
关注小编,私信小编领取哟!
当然别忘了一件三连哟~~
公众号:Python日志
源码点击蓝色字体领取
Python零基础入门到精通视频合集
【整整800集】Python爬虫项目零基础入门合集,细狗都学会了,你还不会?
开发工具
Python版本:3.7.8
相关模块:
pygame模块;
random模块;
pyttsx3模块;
以及一些python自带的模块。
环境搭建
安装Python并添加到环境变量,pip安装需要的相关模块即可。
效果展示
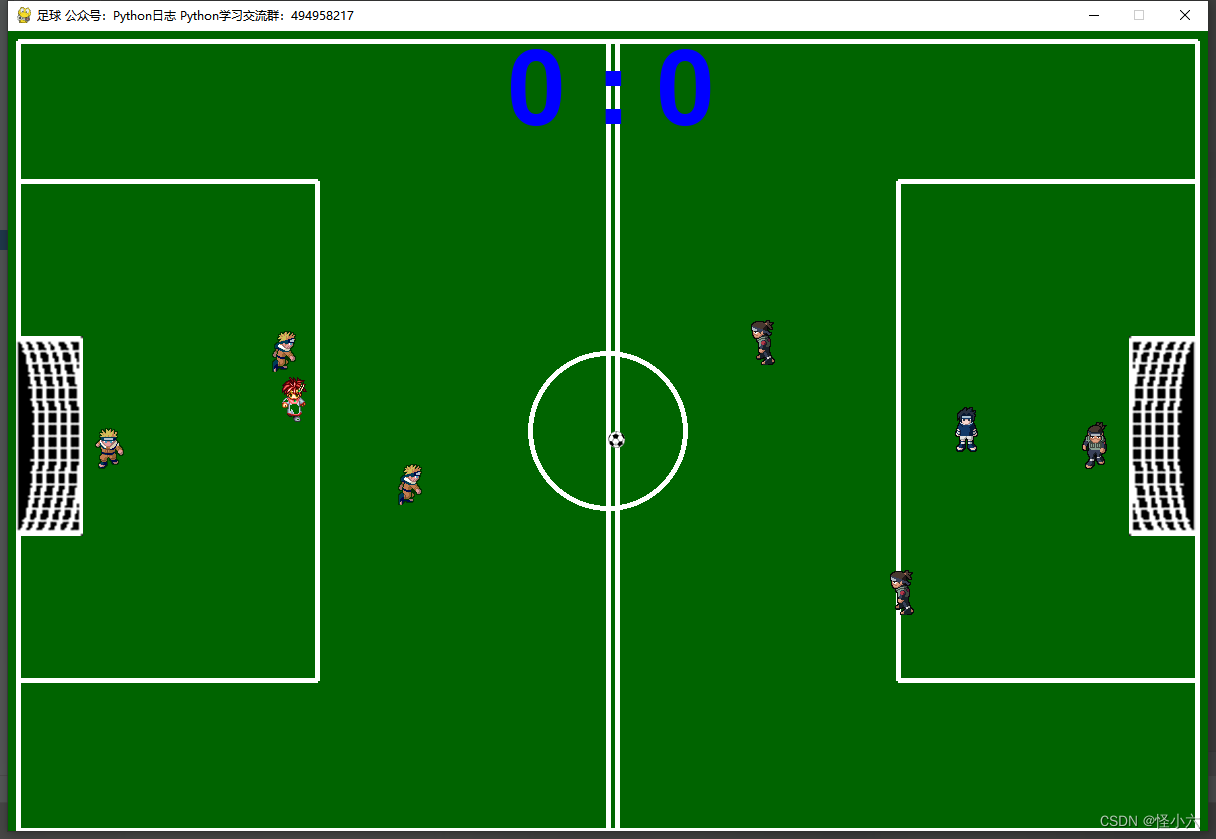
游戏玩法
这是一个双人小游戏,分为红蓝两方。当然每队都有三个球员和一个守门员,每个玩家可以控制一个球员,其他三个是电脑控制。红方球员是通过“W”,“A”,“S”,“D”控制球员的移动,“T”踢球。蓝方球员是通过“↑”,“↓”,“←”,“→”控制球员的移动,“K”踢球。安空格键是开始游戏,下面是整个球场的效果图。
大概了解了游戏规则之后,我们就可以开始写这个游戏啦
开始界面


游戏界面
代码展示
导入模块
from __future__ import unicode_literals
import itertools, sys, time, random, math, pygame
from pygame.locals import *
from MyLibrary import *
from football import *
from IO import*
坐标
def bias(x, y):
x = x + 16
y = y + 24
x_cent = 0
y_cent = 0
if (x >= 100 and x <= 700):
x_cent = -1 * x + 100
elif (x > 700):
x_cent = -600
else:
x_cent = 0
if (y >= 75 and y <= 525):
y_cent = -1 * y + 75
elif (y > 525):
y_cent = -450
else:
y_cent = 0
return x_cent, y_cent
玩家类
class MySprite(pygame.sprite.Sprite):
def __init__(self):
pygame.sprite.Sprite.__init__(self) #extend the base Sprite class
self.master_image = None
self.frame = 0
self.old_frame = -1
self.frame_width = 1
self.frame_height = 1
self.first_frame = 0
self.last_frame = 0
self.columns = 1
self.last_time = 0
self.direction = list([0,0])
self.velocity = Point(0.0,0.0)
self.moving = False
self.state = None
self.tag = None
#X property
def _getx(self): return self.rect.x
def _setx(self,value): self.rect.x = value
X = property(_getx,_setx)
#Y property
def _gety(self): return self.rect.y
def _sety(self,value): self.rect.y = value
Y = property(_gety,_sety)
#position property
def _getpos(self): return self.rect.topleft
def _setpos(self,pos): self.rect.topleft = pos
position = property(_getpos,_setpos)
def load(self, filename, width, height, columns):
self.master_image = pygame.image.load(filename).convert_alpha()
self.frame_width = width
self.frame_height = height
self.rect = Rect(0,0,width,height)
self.columns = columns
#try to auto-calculate total frames
rect = self.master_image.get_rect()
self.last_frame = (rect.width // width) * (rect.height // height) - 1
def update(self, current_time, rate=30):
#update animation frame number
if current_time > self.last_time + rate:
self.frame += 1
if self.frame > self.last_frame:
self.frame = self.first_frame
self.last_time = current_time
#build current frame only if it changed
if self.frame != self.old_frame:
frame_x = (self.frame % self.columns) * self.frame_width
frame_y = (self.frame // self.columns) * self.frame_height
rect = Rect(frame_x, frame_y, self.frame_width, self.frame_height)
self.image = self.master_image.subsurface(rect)
self.old_frame = self.frame
def __str__(self):
return str(self.frame) + "," + str(self.first_frame) + \
"," + str(self.last_frame) + "," + str(self.frame_width) + \
"," + str(self.frame_height) + "," + str(self.columns) + \
"," + str(self.rect)
机器人A
class robot(pygame.sprite.Sprite):
def __init__(self):
pygame.sprite.Sprite.__init__(self) #extend the base Sprite class
self.master_image = None
self.frame = 0
self.goal = None
self.old_frame = -1
self.ball = None
self.leader = None
self.frame_width = 1
self.frame_height = 1
self.goal_pos = None
self.first_frame = 0
self.last_frame = 0
self.columns = 1
self.last_time = 0
self.direction = list([0,0])
self.speed = 3
self.moving = False
self.state = "chase"
self.tag = None
self.other_group = None
#X property
def _getx(self): return self.rect.x
def _setx(self,value): self.rect.x = value
X = property(_getx,_setx)
#Y property
def _gety(self): return self.rect.y
def _sety(self,value): self.rect.y = value
Y = property(_gety,_sety)
#position property
def _getpos(self): return self.rect.topleft
def _setpos(self,pos): self.rect.topleft = pos
position = property(_getpos,_setpos)
def load(self, filename, width, height, columns):
self.master_image = pygame.image.load(filename).convert_alpha()
self.frame_width = width
self.frame_height = height
self.rect = Rect(0,0,width,height)
self.columns = columns
#try to auto-calculate total frames
rect = self.master_image.get_rect()
self.last_frame = (rect.width // width) * (rect.height // height) - 1
def update(self, current_time, rate=30):
#update animation frame number
# print("tag :"+str(self.tag))
# print(self.direction)
# print(self.speed)
self.behavior()
if self.state == "back":
self.state ="chase"
if self.direction == [0,0]:
self.still()
return
self.which_frame()
if current_time > self.last_time + rate:
self.frame += 1
if self.frame > self.last_frame:
self.frame = self.first_frame
self.last_time = current_time
#build current frame only if it changed
if self.frame != self.old_frame:
frame_x = (self.frame % self.columns) * self.frame_width
frame_y = (self.frame // self.columns) * self.frame_height
rect = Rect(frame_x, frame_y, self.frame_width, self.frame_height)
self.image = self.master_image.subsurface(rect)
self.old_frame = self.frame
def __str__(self):
return str(self.frame) + "," + str(self.first_frame) + \
"," + str(self.last_frame) + "," + str(self.frame_width) + \
"," + str(self.frame_height) + "," + str(self.columns) + \
"," + str(self.rect)
def still(self):
self.frame= self.last_frame = self.first_frame
def chase(self):
self.direction = [self.ball.Y - self.Y ,self.ball.X- self.X]
def catch(self):
t = self.detected()
if t == 2:
self.direction = [self.goal[1] -self.Y+random.randint(-10,10),self.goal[0]- self.X+random.randint(-10,10)]
self.ball.kick_off()
self.state = "chase"
elif t == 1:
self.direction = [self.leader.Y -self.Y+random.randint(-10,10),self.leader.X - self.X +random.randint(-10,10)]
self.ball.kick_off()
self.state = "chase"
else:
self.direction = [self.goal_pos[1] -self.Y,self.goal_pos[0]- self.X]
# if detected() == 1:
# kick_off()
# def kick_off(self):
# if random.randint(1,10) < 5:
# self.direction = [self.leader.Y -self.Y,self.leader.X - self.X ]
# self.ball.kick_off(self)
# self.state = "chase"
def distant(self,p):
return ((self.X - p.X)**2 + (self.Y - p.Y)**2)**(1/2)
def detected(self):
if self.X < 400 and self.tag == 2 and self.X > 100:
return 2;
if self.X > 780 and self.tag == 1 and self.X < 1100:
return 2
for x in self.other_group:
if self.distant(x) < 100:
return 1;
return 3;
def which_frame(self):
which_column = dict_[tuple(self.direction)]
self.first_frame = which_column * self.columns
self.last_frame = self.first_frame + self.columns - 1
if self.frame < self.first_frame:
self.frame = self.first_frame
def run(self):
if self.direction == [0,0]:
return
if self.X >=0 and self.X < 70 and self.Y >=260 and self.Y <265:
if self.direction[0] == 1:
self.direction[0] = 0
if self.ball.Y >400:
self.direction[1] = 1;
if self.X >= 70 and self.X < 75 and self.Y >=260 and self.Y <265:
if self.direction == [1,-1]:
if self.ball.Y > 400:
self.direction = [1,0]
else:
self.direction = [0,-1]
if self.X >70 and self.X <75 and self.Y >=265 and self.Y <492:
if self.direction[1] == -1:
self.direction[1] =0
if self.X >= 70 and self.X < 75 and self.Y >=492 and self.Y <497:
if self.direction == [-1,-1]:
if self.ball.Y > 400:
self.direction = [0,-1]
else: self.direction = [-1,0]
if self.X >=0 and self.X < 70 and self.Y >=492 and self.Y <497:
if self.direction[0] == -1:
self.direction[0] = 0
if self.ball.Y<400:
self.direction[1] = 1;
if self.X >=1080 and self.X <= 1200 and self.Y >=260 and self.Y <265:
if self.direction[0] == 1:
self.direction[0] = 0
if self.ball.Y >400:
self.direction[1] = -1;
if self.X > 1075 and self.X <= 1080 and self.Y >=260 and self.Y <265:
if self.direction == [1,1]:
if self.ball.Y > 400:
self.direction = [1,0]
else:
self.direction = [0,1]
if self.X > 1075 and self.X <= 1080 and self.Y >=265 and self.Y < 498:
if self.direction[1] == 1:
self.direction[1] =0
if self.X > 1075 and self.X<= 1080 and self.Y >=498 and self.Y <502:
if self.direction == [-1,1]:
if self.ball.Y > 400:
self.direction = [0,1]
else: self.direction = [-1,0]
if self.X >=1080 and self.X <= 1200 and self.Y >=498 and self.Y <502:
if self.direction[0] == -1:
self.direction[0] = 0
if self.ball.Y<400:
self.direction[1] = -1;
self.Y += self.direction[0]*self.speed
self.X += self.direction[1]*self.speed
# print(str(self.X)+" "+str(self.Y))
def back(self):
self.direction = [0,600 - self.X]
def behavior(self):
if self.state =="back":
self.back()
elif self.state == "chase":
self.chase()
elif self.state == "catch":
self.catch()
if self.direction[0]>0:
self.direction[0]=1
elif self.direction[0]<0:
self.direction[0] = -1
if self.direction[1]>0:
self.direction[1] =1
elif self.direction[1]<0:
self.direction[1] =-1
# print(self.tag)
# print(self.direction)
self.ch_sp()
self.run()
def ch_sp(self):
if self.tag == 1:
if self.X <600:
self.speed = 2
else:self.speed = 1
else:
if self.X > 600:
self.speed = 2
else :
self.speed =1
机器人B
class robot_B(robot):
def __init__(self):
robot.__init__(self)
self.wonder = None
self.speed =1
def wondering(self):
if self.X > self.wonder+1 or self.X <self.wonder -1 :
self.direction = [560-self.Y,self.wonder- self.X]
elif self.Y <280:
self.direction = [560-self.Y,0]
elif self.Y > 550:
self.direction = [270-self.Y,0]
def behavior(self):
if self.state =="back":
self.back()
elif (self.ball.X > 600 and self.tag == 1) or (self.ball.X < 600 and self.tag == 2):
self.wondering()
else:
if self.state == "chase":
self.chase()
elif self.state == "catch":
self.catch()
if self.direction[0]>0:
self.direction[0]=1
elif self.direction[0]<0:
self.direction[0] = -1
if self.direction[1]>0:
self.direction[1] =1
elif self.direction[1]<0:
self.direction[1] =-1
self.run()
def catch(self):
if random.randint(1,10)<5:
self.direction = [self.goal[1] -self.Y,self.goal[0]- self.X]
self.ball.kick_off()
self.state = "chase"
else:
self.direction = [self.leader.Y -self.Y,self.leader.X - self.X ]
self.ball.kick_off()
self.state = "chase"
球类
# -*- coding: utf-8 -*-
from __future__ import unicode_literals
import sys, time, random, math, pygame
from pygame.locals import *
from math import pow
class ball(pygame.sprite.Sprite):
def __init__(self):
pygame.sprite.Sprite.__init__(self)
self.image_list = []
self.image = None
self.frame = 0
self.old_frame = 0
self.first_frame = 0
self.last_frame = 2
self.direction = list([0,0])
self.speed = 0;
self.fetch = False;
self.f = 1.7
self.last_time = 0;
self.player = None
self.cal = 0
def _getx(self): return self.rect.x
def _setx(self,value):self.rect.x = value
X = property(_getx,_setx)
#Y property
def _gety(self):return self.rect.y
def _sety(self,value):self.rect.y = value
Y = property(_gety,_sety)
#position property
def _getpos(self): return self.rect.topleft
def _setpos(self,pos): self.rect.topleft = pos
position = property(_getpos,_setpos)
def load(self):
filename = 'ball1.png','ball2.png','ball3.png'
for x in filename:
ball = pygame.image.load(x).convert_alpha()
self.image_list.append(ball)
self.frame = 0;
self.old_frame = 2;
self.image = self.image_list[0];
self.frame_height = self.image_list[0].get_rect().height
self.frame_width = self.image_list[0].get_rect().width
self.rect = Rect(0,0,self.frame_width,self.frame_height);
def update(self,current_time,rate =30):
if self.fetch and self.player.moving:
self.speed = (self.player.velocity.x **2 + self.player.velocity.y **2)**(1/2)
if self.speed == 0 or (self.fetch and self.player.moving == False):
return
if current_time > self.last_time + (4-self.speed//4)*20:
self.frame += 1
self.frame %= 3
self.last_time = current_time
if self.frame != self.old_frame:
self.image = self.image_list[self.frame]
self.old_frame = self.frame
# print(self.frame)
def run(self):
self.speed -= self.f*0.05;
self.speed = max(0,self.speed)
if(self.direction==[0,0]):return;
# print(self.direction)
# print(self.speed)
self.X += ((self.direction[0]*self.speed)/pow((self.direction[1]**2 + self.direction[0]**2),(1/2)))
self.Y += ((self.direction[1]*self.speed)/pow((self.direction[0]**2 + self.direction[1]**2),(1/2)))
def fetched(self,player_):
self.fetch = True;
if player_ != None:
self.player = player_
player = self.player
if(player.direction[1] >0):
self.X = self.player.X + self.player.frame_width*3/4
else :
self.X = self.player.X - self.player.frame_width/3
self.Y = self.player.Y + self.player.frame_height -self.frame_height;
def kick_off(self):
self.speed = 12
self.direction[0] = self.player.direction[1]
self.direction[1] =self.player.direction[0]
self.player = None
self.fetch =False
self.cal = 0
def check_bound(self,width,height):
temp = self.X,self.Y
if self.X < 0:
self.X =0
self.direction[0] = abs(self.direction[0])
if self.Y < 0:
self.Y = 0
self.direction[1] = abs(self.direction[1])
if self.X >width-34:
self.X= width-34
self.direction[0] = -1*abs(self.direction[0])
if self.Y > height-14:
self.Y = height-14;
self.direction[1] = -1*abs(self.direction[1])
if self.X >=0 and self.X <72 and self.Y >300 - 17 and self.Y <315 - 17:
self.Y = 300-17
self.direction[1] = -1*abs(self.direction[1])
if self.X >1110 and self.X <1200 and self.Y >300 - 17 and self.Y <315 - 17:
self.Y = 300-17
self.direction[1] = -1*abs(self.direction[1])
if self.X >=0 and self.X <72 and self.Y >495 and self.Y <510:
self.Y = 510
self.direction[1] = -1*abs(self.direction[1])
if self.X >1110 and self.X <1200 and self.Y >495 and self.Y <510:
self.Y = 510
self.direction[1] = -1*abs(self.direction[1])
if((self.X,self.Y) != temp):
# print(str(self.X)+" "+str(self.Y))
# print(temp)
self.speed *= 0.8
总结
部分代码展示在上面了,因为源码太多就不一一给大家展示了
源码领取看相关文件哟









![[附源码]JAVA毕业设计同德佳苑物业信息(系统+LW)](https://img-blog.csdnimg.cn/c0c356d348bd4db3b9277b0cbfa8bd95.png)