目录
1.算法描述
2.仿真效果预览
3.MATLAB核心程序
4.完整MATLAB
1.算法描述
Dijkstra(迪杰斯特拉)算法是典型的最短路径路由算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止(BFS、prime算法都有类似思想)。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。
算法描述
(1)S为已经找到的从v出发的最短路径的终点集合,它的初始状态为空集,将源点加入S中。 其余顶点构成集合U。
(2)构建源点到其余顶点的距离列表,与源点不相连的顶点距离记为∞。
(3)广度遍历与源点相连的顶点,找到距离最近的顶点,则到这个顶点的最短路径就确定了,最短距离就是当前距离,将这个顶点从U中拿出,放入S中。
(4)用当前的顶点作为中间点,对其进行广度遍历,对遍历到的顶点距离进行更新。
(5)在U中搜索最短距离的顶点,将其放入S。
(6)以这个节点作为中间点广度搜索,更新距离。
(7)重复这个过程,直至U为空。
Astar算法是一种图形搜索算法,常用于寻路。它是个以广度优先搜索为基础,集Dijkstra算法与最佳优先(best fit)算法特点于一身的一种 算法。AStar(又称 A*),它结合了 Dijkstra 算法的节点信息(倾向于距离起点较近的节点)和贪心算法的最好优先搜索算法信息(倾向于距离目标较近的节点)。可以像 Dijkstra 算法一样保证找到最短路径,同时也像贪心最好优先搜索算法一样使用启发值对算法进行引导。AStar的核心在于将游戏背景分为一个又一个格子,每个格子有自己的靠谱值,然后通过遍历起点的格子去找到周围靠谱的格子,接着继续遍历周围…… 最终找到终点。
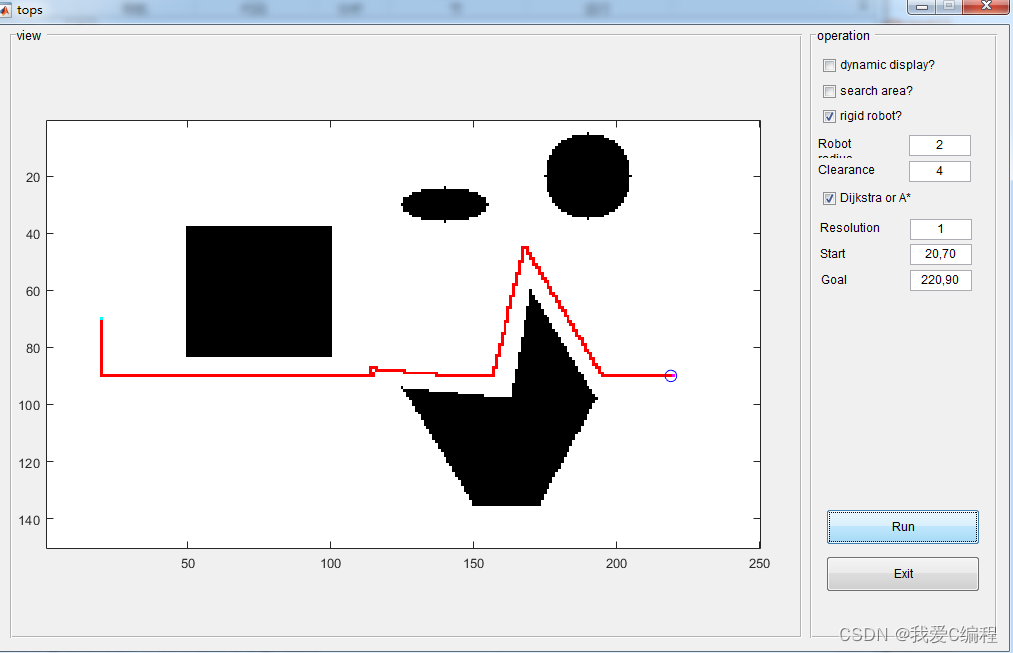
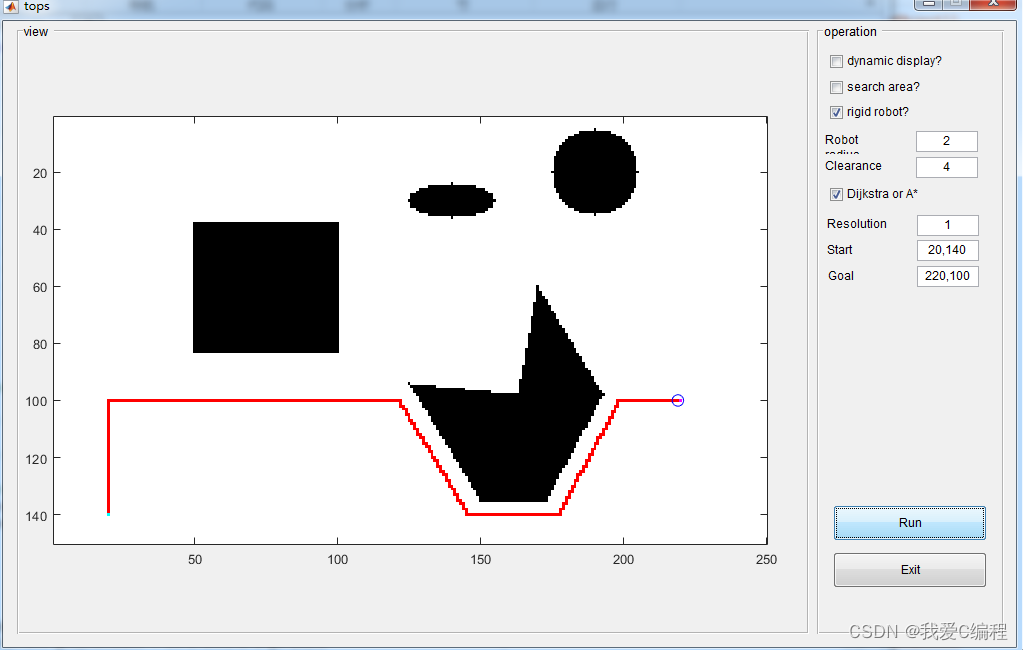
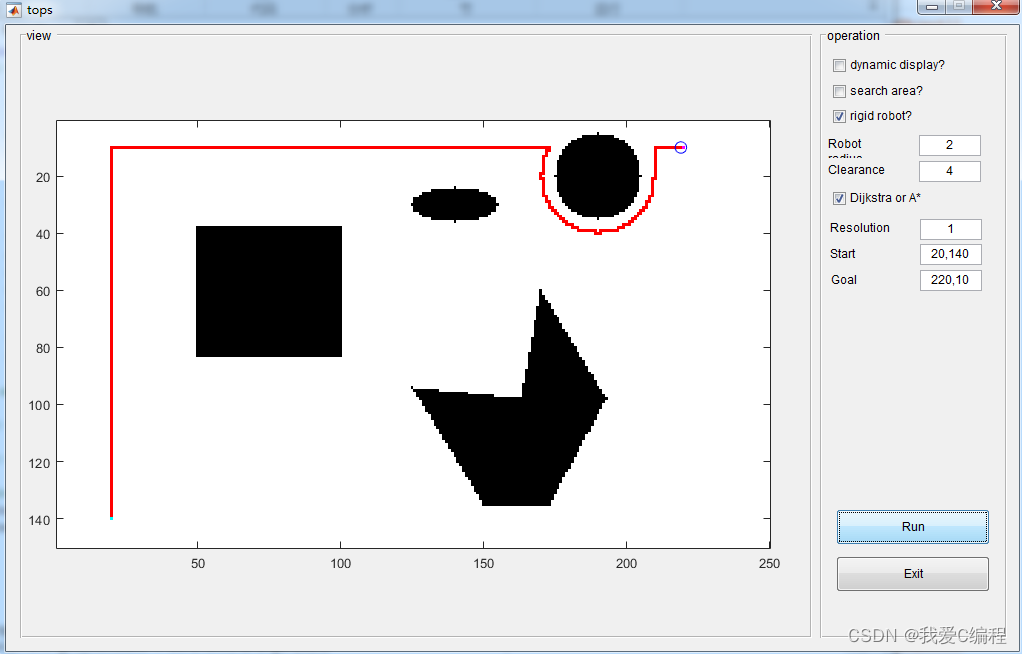
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
isshow = 0;
if get(handles.checkbox1,'Value')==1
isshow = 1;%是否显示动态过程
else
isshow = 0;
end
isshow2 = 0;
if get(handles.checkbox2,'Value')==1
isshow2 = 1;%是否显示搜索区域
else
isshow2 = 0;
end
isrigid = 0;
if get(handles.checkbox3,'Value')==1
isrigid = 1;%是否为刚体机器人
else
isrigid = 0;
end
algsel = 0;
if get(handles.checkbox4,'Value')==1
algsel = 1;%算法选择
else
algsel = 0;
end
X = 250;
Y = 150;
% Resolution / Grid Size for the Map_updata
%网格化处理,转换为矩阵
step = str2num(get(handles.edit1,'string'));;%定义精度越小,精度越高
tmps1 = str2num(get(handles.edit2,'string'));
tmps2 = str2num(get(handles.edit3,'string'));
tmps3 = str2num(get(handles.edit4,'string'));
tmps4 = str2num(get(handles.edit5,'string'));
% Start point
Starts = floor([tmps1(1),tmps1(2)]/step)
% Robot radius
Rad = floor(tmps3/step);
% Clearance
Clearance = floor(tmps4/step);
% Goal point
Ends = floor([tmps2(1),tmps2(2)]/step);
Map = func_map(X,Y,step);
Mapr = func_map_rigid(X,Y,step,Clearance);
[R,C] = size(Map);
axes(handles.axes1);
Color_Map = [1,1,1;0,0,0;1,1,0;1,1,0;0,1,1;1,0,1;1,0,0];
Map_updata1 = Map;
Map_updata2 = Mapr;
Map_updata1(Starts(2),Starts(1)) = 5;%起点
Map_updata1(Ends(2) ,Ends(1)) = 6;%终点
Map_updata2(Starts(2),Starts(1)) = 5;%起点
Map_updata2(Ends(2) ,Ends(1)) = 6;%终点
colormap(Color_Map);
image(Map_updata1);
axis image;
if algsel == 0
[Map_updata,route]=func_Dijkstra(Map_updata1,Map_updata2,Starts,Ends,R,C,isshow,isshow2,isrigid);
else
[Map_updata,route]=func_Astar(Map_updata1,Map_updata2,Starts,Ends,R,C,isshow,isshow2,isrigid);
end
Map_updata_=Map_updata;
for k = 2:length(route)-1
Map_updata(route(k)) = 7;
tmps = Map_updata_(route(k));
Map_updata_(route(k))= 7;
image(Map_updata);
%显示机器人
[x,y]=find(Map_updata_==7);
hold on
if isrigid==0
plot(y(1),x(1),'bo','MarkerSize',2);
else
[xrr,yrr] = rigid_robot(Rad,y(1),x(1));
plot(xrr,yrr,'b-');
end
hold off;
axis image;
Map_updata_(route(k))= tmps;
pause(0.00002);
end
02_064m4.完整MATLAB
V



![[附源码]JAVA毕业设计同德佳苑物业信息(系统+LW)](https://img-blog.csdnimg.cn/c0c356d348bd4db3b9277b0cbfa8bd95.png)


![[附源码]Python计算机毕业设计SSM基于响应式交友网站(程序+LW)](https://img-blog.csdnimg.cn/bedfa579e5e64de99616763262a474bd.png)