——青年有志
🏆初衷: 通俗的语言 dapei 核心的内容
🎉 博主相信: 有足够的积累,并且一直在路上,就有无限的可能!!!
👨🎓个人主页: 青年有志的博客
💯 Gitee 源码地址: https://gitee.com/futurelqh/Multi-objective-evolutionary-optimization
前言
前驱知识
- 粒子群优化算法 PSO:https://blog.csdn.net/qq_46450354/article/details/127464089
- Pareto 最优解集: https://blog.csdn.net/qq_46450354/article/details/127917026
粒子群优化算法 PSO
pbest: 粒子本身经历过的最优位置
gbest: 粒子群整体经历过的最优位置
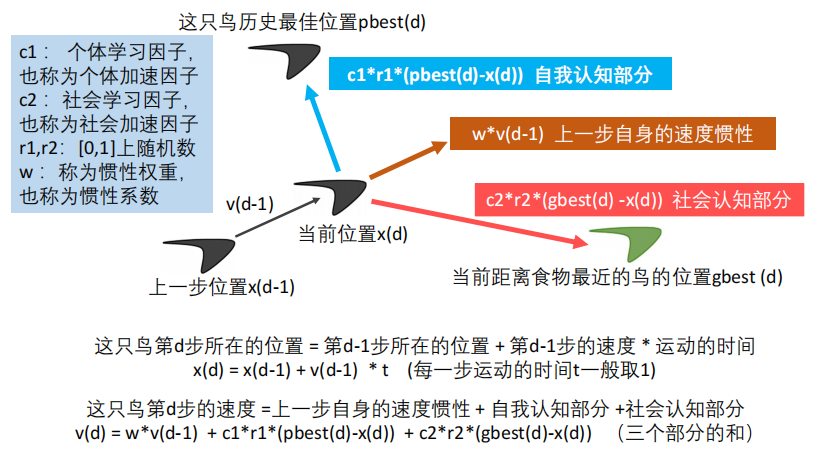
算法思路: 在单目标优化中,通过自我认知 pbest 以及社会认知 gbest 来计算出每个个体下一次移动的速度,从而更新个体所处的位置 x,并更新个体 pbest,以及群体的 gbest,更新的依据直接通过比较目标函数值 function value 的大小即可。
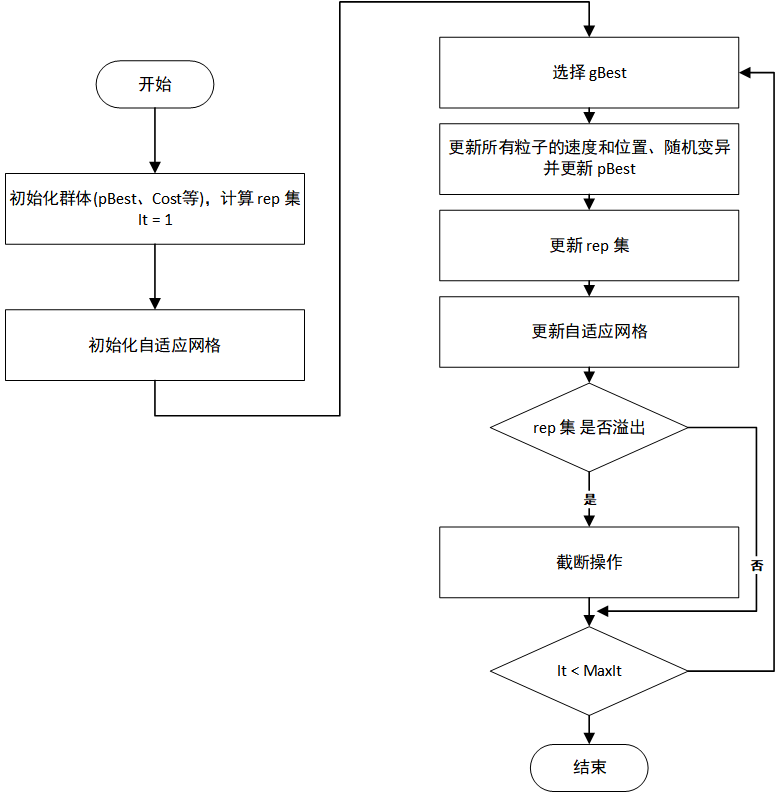
PSO 算法流程图

PSO 引出 MOPSO
- PSO 在用于单目标优化过程中,由于只有一个函数,两个个体之间可以通过直接比较大小来判断好坏,从而判断是否更新 pbest,gbest。
- 在多目标问题中存在多个目标值,比如求两个目标函数的最小值,有两个个体 P 1 = ( 8 , 15 ) , P 2 = ( 10 , 12 ) {P_1} = (8, 15), P_2 = (10, 12) P1=(8,15),P2=(10,12), P 1 {P_1} P1 的第一个目标函数值小于 P 2 {P_2} P2,而第二个目标函数值大于 P 2 P_2 P2,如何判断谁更好呢?
问题:
- 如何更新多目标中的 pbest ?
- 如何更新多目标中的 gbest ?
- 对于多目标优化问题,输出的结果为一个集合,即 rep (非支配集/归档集) ,此集合的大小如何维护 ?
- 并且 PSO 很容易陷入局部最优,如何避免呢?
注: rep 集,在部分文献中会称为 Archive 集,均为同一种,即当前迭代中的的非支配集,也称为归档集,为避免混淆,本文同一使用 rep 。
MOPSO 所解决的正是这些个问题,从而将单目标 PSO,变为了能够高效求解多目标优化的算法。下面我们来看看这些问题是如何解决的
1. 如何更新多目标中的 pbest ?
分为三种情况进行更新:
- ① 当新产生的个体 i 在每个目标函数值上都比 pbest 更优越,则更新 pbest (i 支配 pbest)
- ② 当新产生的个体 i 在每个目标函数值上都比 pbest 更劣,则不更新 (pbest 支配 i)
- ③ 当新产生的个体 i 在部分目标函数值上比 pbest 优越,则随机按照一定的概率进行更新 (i 与 pbest 互不支配)
2. 如何更新多目标中的 gbest ?
- 如何在所有互不支配的个体当中选出这个 leader 个体呢? 这就需要引入自适应网格算法了
自适应网格算法
~~~~~~ 算法思路: 将所有个体划分在不同的网格里面,再计算网格的密度,密度越小的网格,粒子越稀疏,个体被选择的概率越大(从而保证粒子的分布性)。具体步骤如下:
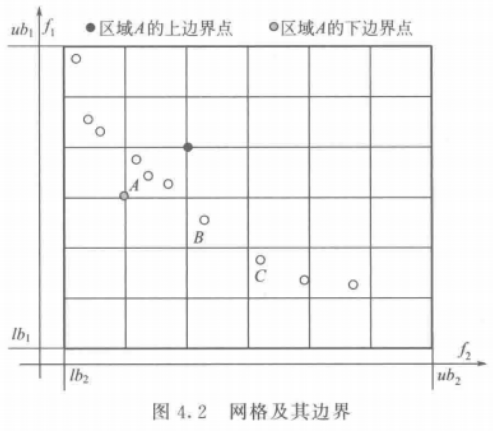
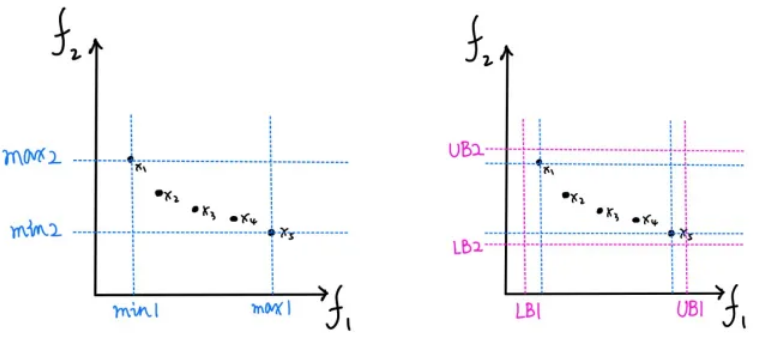
Step1: 遍历集合种群中的所有个体,分别在每一个目标函数上找出所有个体中的最小值和最大值,如图所示,获得目标函数 f 1 f_1 f1 上的最小值 m i n 1 min_1 min1、最大值 m a x 1 max_1 max1,以及目标函数 f 2 f_2 f2 上的最小值 m i n 2 min_2 min2、最大值 m a x 2 max_2 max2。为了保证边界粒子 x 1 、 x 5 x_1、x_5 x1、x5 也能在网格内,需要进行延长操作,把最大最小值根据一定比例稍微延长一点,最后获得网格的边界 L B 1 、 U B 1 、 L B 2 、 U B 2 LB_1、UB_1、LB_2、UB_2 LB1、UB1、LB2、UB2
Step2: 假设设置的参数 n = 3,将网格平均切割成 3 X 3 = 9 个格子
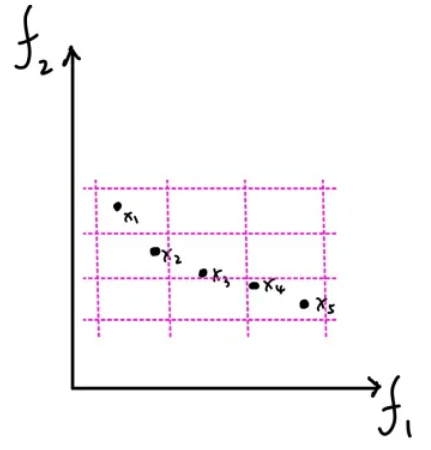
Step3: 摘选出其中有个体的网格,并计算这些网格中存储的个体总数,如:① = 1,② = 1,③ = 1,④ = 2

Step4: 由前面获得的个体数根据公式计算这些网格的被选概率,个体越少被选概率越大,归一化所有网格的被选概率和为 1。
Step5: 根据前面计算的概率,采取轮盘赌方法选择一个网格,该网格中的个体作为 gBest 备选集,在备选集中采用随机选择的方法选择其中一个个体作为全局最优 gBest
3. 如何维护 rep (非支配集/归档集) ?
- 同样可以采取自适应网格算法。即假设在加入新的非支配个体后,rep 库现在的长度是 m ( m > N ) m(m>N) m(m>N),此时我们需要删除 m − N m-N m−N 个个体来保证 rep 不溢出。此时只需要通过自适应网格法从 rep 库中选择出一个最差劲个体然后从rep库中删除,如此循环 m − N m-N m−N 次,问题迎刃而解
-
首先,根据支配关系进行第一轮筛选,将个体自身与上一次相比的劣解去除,即更新 pbest
-
将所有个体根据支配关系进行第二轮筛选,将劣解去除,并加入到 rep 归档集中,并计算个体所处的网格位置
-
最后,若归档集数量超过了存档阀值,则根据自适应网格进行筛选删除,直到阀值限额为止,重新进行网格划分。
4. 如何避免算法陷入局部最优?
Step1: 对当前的粒子 x,根据当前迭代次数 It 和最大迭代次数 MaxIt 以及突变率 m 计算扰乱算子 p。
p = ( 1 − ( I t − 1 ) ( M a x I t − 1 ) ) ( 1 / m ) p = ( 1 -\frac{ ( It - 1 ) }{ ( MaxIt - 1 )} )^ {( 1 / m )} p=(1−(MaxIt−1)(It−1))(1/m)
Step2: 获取随机数 rand,如果 rand < p,随机选择粒子的某个决策变量进行变异,其余决策变量不变;若 rand 不小于 p,则保持不变。
Step3: 如果粒子需要变异,首先随机选择到粒子 x 的第 j 个决策变量 x(j),然后根据扰乱算子计算变异范围 d,
d = p ∗ ( V a r M a x − V a r M i n ) ; d = p * (VarMax-VarMin); d=p∗(VarMax−VarMin);
式中, V a r M a x VarMax VarMax 和 V a r m i n Varmin Varmin 分别是规定的决策变量的最大值和最小值。
Step4: 由 d 计算变异的上下界,上界
U
B
=
x
(
j
)
+
d
UB=x(j) + d
UB=x(j)+d,下界
L
B
=
x
(
j
)
−
d
LB=x(j) - d
LB=x(j)−d。同时注意越界处理:
U
B
=
m
i
n
(
U
B
,
V
a
r
m
a
x
)
,
L
B
=
m
a
x
(
L
B
,
V
a
r
m
i
n
)
UB=min(UB,Var_{max}),LB=max(LB,Var_{min})
UB=min(UB,Varmax),LB=max(LB,Varmin)
Step5: 最后根据变异的范围 [ L B , U B ] [LB,UB] [LB,UB] 随机获取新的 x ( j ) = u n i f r n d ( l b , u b ) x(j)=unifrnd(lb, ub) x(j)=unifrnd(lb,ub) ,即获得区间 ( l b , u b ) (lb,ub) (lb,ub) 中的一个随机数。
Step6: 在粒子变异后,要比较变异后的粒子是否更优秀,如果变异后的粒子更优秀则更新粒子,否则不更新;同样还要比较新的粒子和粒子的 pBest,若新的粒子比 pBest 优秀则更新 pBest,否则不更新。
算法流程
综上可知 MOPSO 算法主要是针对以下一些问题进行研究:
-
如何选择 pbest。对于多目标来说两个粒子的对比,并不能对比出哪个好一些。如果粒子的每个目标都要好的话,则该粒子更优。若有些更好,有些更差的话,就无法严格的说哪个好些,哪个差一些。
-
如何选择 gbest。对于多目标来说,最优的个体有很多个。该如何选择,涉及到最优个体的存档、存档的管理等问题(多样性/分布性)
-
速度更新公式优化;
-
位置更新处理;
-
增加扰乱算子即变异算子的选择问题,主要是为了解决 PSO 快速收敛到局部最优的问题,增加扰乱可以使得收敛到全局最优
-
增加一些其他的操作来改善收敛性和多样性
补充
- 上述解决方案为较简单的方式,还可以有其他很多方式来解决这三类问题,从而实现不同的算法。
-
速度更新公式的优化,如:引入了一个收缩因子等
-
解决算法快速收敛陷入局部最优的问题,如:变异操作
-
算法收敛性和多样性的实现方式,如本文的自适应网格算法;
-
MOPSO 的存档方法
算法执行图
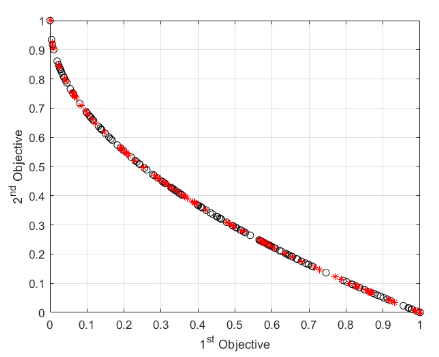
算法在 ZDT1 测试函数下的执行结果
代码实现
mopso.mlx
Problem Definition
CostFunction = @(x) ZDT(x); % Cost Function
nVar = 5; % Number of Decision Variables
VarSize = [1 nVar]; % Size of Decision Variables Matrix
VarMin = 0; % Lower Bound of Variables
VarMax = 1; % Upper Bound of Variables
MOPSO Parameters
MaxIt = 200; % Maximum Number of Iterations
nPop = 200; % Population Size
nRep = 100; % Repository Size
w = 0.5; % Inertia Weight
wdamp = 0.99; % Intertia Weight Damping Rate
c1 = 1; % Personal Learning Coefficient
c2 = 2; % Global Learning Coefficient
nGrid = 7; % Number of Grids per Dimension
alpha = 0.1; % Inflation Rate
beta = 2; % Leader Selection Pressure
gamma = 2; % Deletion Selection Pressure
mu = 0.1; % Mutation Rate
Initialization
empty_particle.Position = [];
empty_particle.Velocity = [];
empty_particle.Cost = [];
empty_particle.Best.Position = [];
empty_particle.Best.Cost = [];
empty_particle.IsDominated = [];
empty_particle.GridIndex = [];
empty_particle.GridSubIndex = [];
pop = repmat(empty_particle, nPop, 1);
for i = 1:nPop
pop(i).Position = unifrnd(VarMin, VarMax, VarSize); % 产生范围内的连续随机数
pop(i).Velocity = zeros(VarSize);
pop(i).Cost = CostFunction(pop(i).Position);
% Update Personal Best
pop(i).Best.Position = pop(i).Position;
pop(i).Best.Cost = pop(i).Cost;
end
% Determine Domination
pop = DetermineDomination(pop);
rep = pop(~[pop.IsDominated]); % 选出当前非支配个体
Grid = CreateGrid(rep, nGrid, alpha); % 定义网格
for i = 1:numel(rep)
rep(i) = FindGridIndex(rep(i), Grid); % 给每个个体分配网格位置
end
MOPSO Main Loop
for it = 1:MaxIt
for i = 1:nPop
leader = SelectLeader(rep, beta); % 轮盘赌选择 gbest
pop(i).Velocity = w*pop(i).Velocity ...
+c1*rand(VarSize).*(pop(i).Best.Position-pop(i).Position) ...
+c2*rand(VarSize).*(leader.Position-pop(i).Position);
% 更新位置
pop(i).Position = pop(i).Position + pop(i).Velocity;
% 越界判断
pop(i).Position = max(pop(i).Position, VarMin);
pop(i).Position = min(pop(i).Position, VarMax);
% 计算新的目标值
pop(i).Cost = CostFunction(pop(i).Position);
if Dominates(pop(i), pop(i).Best) % 如果 i 支配 Best,则更新 Best
pop(i).Best.Position = pop(i).Position;
pop(i).Best.Cost = pop(i).Cost;
elseif Dominates(pop(i).Best, pop(i)) % 若 Best 支配 i ,则不更新
% Do Nothing
else % 若互不支配,则产生随机数判断是否更新
if rand<0.5
pop(i).Best.Position = pop(i).Position;
pop(i).Best.Cost = pop(i).Cost;
end
end
end
% Add Non-Dominated Particles to REPOSITORY
rep = [rep
pop(~[pop.IsDominated])]; %#ok
% Determine Domination of New Resository Members
rep = DetermineDomination(rep);
% Keep only Non-Dminated Memebrs in the Repository
rep = rep(~[rep.IsDominated]);
% Update Grid
Grid = CreateGrid(rep, nGrid, alpha);
% Update Grid Indices
for i = 1:numel(rep)
rep(i) = FindGridIndex(rep(i), Grid);
end
% Check if Repository is Full
if numel(rep)>nRep
Extra = numel(rep)-nRep;
for e = 1:Extra
rep = DeleteOneRepMemebr(rep, gamma);
end
end
% Plot Costs
figure(1);
PlotCosts(pop, rep);
pause(0.01);
% Show Iteration Information
disp(['Iteration ' num2str(it) ': Number of Rep Members = ' num2str(numel(rep))]);
% Damping Inertia Weight
w = w*wdamp;
end
ZDT.m:测试函数 ZDT1
function z = ZDT(x)
% Function: z = ZDT(x)
%
% Description: 此系列的测试函数总共有 6 个,ZDT1 ~ ZDT6, 属于数值型测试函数,
% 当前实现的测试函数为 ZDT1
%
%
% Syntax:
%
%
% Parameters:
% x:决策变量
%
% Return:
% z:函数结果 f1, f2
%
% Young99
% Revision: Data:
%*************************************************************************
n = numel(x);
f1 = x(1);
g = 1+9/(n-1)*sum(x(2:end));
h = 1-sqrt(f1/g);
f2 = g*h;
z = [f1
f2];
end
DetermineDomination.m:判断是否为非支配个体
function pop = DetermineDomination(pop)
% Function: pop = DetermineDomination(pop)
%
% Description: 计算个体之间的支配关系,若被其他个体支配,将 IsDominated 设置为 true
%
%
% Syntax:
%
%
% Parameters:
% pop:种群
%
% Return:
% pop:进行非支配标记后的种群
%
% Young99
% Revision:1.0 Data: 2022-12-07
%*************************************************************************
nPop = numel(pop);
% 初始化每个个体均为非支配个体
for i = 1:nPop
pop(i).IsDominated = false;
end
% 两两个体比较
for i = 1:nPop-1
for j = i+1:nPop
if Dominates(pop(i), pop(j))
pop(j).IsDominated = true;
end
if Dominates(pop(j), pop(i))
pop(i).IsDominated = true;
end
end
end
end
Dominates.m:两两个体之间比较大小
function b = Dominates(x, y)
% Function: b = Dominates(x, y)
%
% Description: 比较两个个体的函数值
%
%
% Syntax:
%
%
% Parameters:
% pop:种群
%
% Return:
% b:比较结果,为布尔型
%
% Young99
% Revision:1.0 Data: 2022-12-07
%*************************************************************************
if isstruct(x)
x = x.Cost;
end
if isstruct(y)
y = y.Cost;
end
b = all(x <= y) && any(x<y);
end
CreateGrid.m:创建自适应网格
function Grid = CreateGrid(pop, nGrid, alpha)
% Function: Grid = CreateGrid(pop, nGrid, alpha)
%
% Description: 为每一个目标函数,选出 pop 中个体目标函数值的最小及最大值
% 将最小最大值利用 alpha 参数扩展一定的范围,作为当前维度网格的上下限
%
%
% Syntax:
%
%
% Parameters:
% pop:rep 即为当前轮的非支配个体
% nGrid:网格的维度大小
% alpha:自定义参数,用于调整网格的最大最小上下线
%
% Return:
% Grid:定义后的网格
%
% Young99
% Revision:1.0 Data: 2022-12-07
%*************************************************************************
c = [pop.Cost];
cmin = min(c, [], 2);
cmax = max(c, [], 2);
dc = cmax-cmin;
cmin = cmin-alpha*dc;
cmax = cmax+alpha*dc;
nObj = size(c, 1);
empty_grid.LB = [];
empty_grid.UB = [];
Grid = repmat(empty_grid, nObj, 1);
for j = 1:nObj
cj = linspace(cmin(j), cmax(j), nGrid+1);
Grid(j).LB = [-inf cj];
Grid(j).UB = [cj +inf];
end
end
FindGridIndex.m:为每个个体确定在网格中的位置
function particle = FindGridIndex(particle, Grid)
% Function: particle = FindGridIndex(particle, Grid)
%
% Description: 为 rep 中的每个个体划分所在的网格,其中
% GridSubIndex 表示每维目标所对应的网格位置
% GridIndex 表示将 GridSubIndex 归并为一个数来表示
%
%
% Syntax:
%
%
% Parameters:
% particle:当前非支配集中的一个个体
% Grid:已经划分好的网格,用于自适应网格算法
%
% Return:
% particle:划分到对应网格后的个体
%
% Young99
% Revision:1.0 Data: 2022-12-07
%*************************************************************************
nObj = numel(particle.Cost);
nGrid = numel(Grid(1).LB);
particle.GridSubIndex = zeros(1, nObj);
for j = 1:nObj
particle.GridSubIndex(j) = ...
find(particle.Cost(j)<Grid(j).UB, 1, 'first');
end
% 将高维转化为一维的空间索引
particle.GridIndex = particle.GridSubIndex(1);
for j = 2:nObj
particle.GridIndex = particle.GridIndex-1;
particle.GridIndex = nGrid*particle.GridIndex;
particle.GridIndex = particle.GridIndex+particle.GridSubIndex(j);
end
end
SelectLeader.m:利用网格聚集密度选择 gBest
function leader = SelectLeader(rep, beta)
% Function: leader = SelectLeader(rep, beta)
%
% Description: 利用轮盘赌选出其中一个网格,网格聚集密度越小,越容易被选中,
% 再在选中的网格中随机选出一个个体作为 leader 即 gbest
%
%
% Syntax:
%
%
% Parameters:
% rep:当前迭代的非支配个体
% beta:自定义参数
%
% Return:
% leader:被选中的 gbest
%
% Young99
% Revision:1.0 Data: 2022-12-07
%*************************************************************************
% Grid Index of All Repository Members
GI = [rep.GridIndex];
% Occupied Cells
OC = unique(GI);
% Number of Particles in Occupied Cells
N = zeros(size(OC));
for k = 1:numel(OC)
N(k) = numel(find(GI == OC(k)));
end
% Selection Probabilities
P = exp(-beta*N); % 注意这是有负数,表示个体数越多的网格被选择的概率越小
P = P/sum(P); % 转化为和为 1 的概率
% Selected Cell Index
sci = RouletteWheelSelection(P);
% Selected Cell
sc = OC(sci);
% Selected Cell Members
SCM = find(GI == sc);
% Selected Member Index,random selection
smi = randi([1 numel(SCM)]);
% Selected Member
sm = SCM(smi);
% Leader
leader = rep(sm);
end
RouletteWheelSelection.m: 轮盘赌
function i = RouletteWheelSelection(P)
% 轮盘赌用于选择某个网格
r = rand;
C = cumsum(P);
i = find(r <= C, 1, 'first');
end
DeleteOneRepMemebr.m:当 rep 超出阈值,进行删除操作
function rep = DeleteOneRepMemebr(rep, gamma)
% Function: rep = DeleteOneRepMemebr(rep, gamma)
%
% Description: 利用轮盘赌选出其中一个网格,网格聚集密度越大,越容易被选中,
% 再在选中的网格中随机选出一个个体删除
%
%
% Syntax:
%
%
% Parameters:
% rep:当前迭代的非支配个体
% beta:自定义参数
%
% Return:
% leader:被选中的 gbest
%
% Young99
% Revision:1.0 Data: 2022-12-07
%*************************************************************************
% Grid Index of All Repository Members
GI = [rep.GridIndex];
% Occupied Cells
OC = unique(GI);
% Number of Particles in Occupied Cells
N = zeros(size(OC));
for k = 1:numel(OC)
N(k) = numel(find(GI == OC(k)));
end
% Selection Probabilities
P = exp(gamma*N);
P = P/sum(P);
% Selected Cell Index
sci = RouletteWheelSelection(P);
% Selected Cell
sc = OC(sci);
% Selected Cell Members
SCM = find(GI == sc);
% Selected Member Index
smi = randi([1 numel(SCM)]);
% Selected Member
sm = SCM(smi);
% Delete Selected Member
rep(sm) = [];
end
PlotCosts.m:画图可视化
function PlotCosts(pop, rep)
pop_costs = [pop.Cost];
plot(pop_costs(1, :), pop_costs(2, :), 'ko');
hold on;
rep_costs = [rep.Cost];
plot(rep_costs(1, :), rep_costs(2, :), 'r*');
xlabel('1^{st} Objective');
ylabel('2^{nd} Objective');
grid on;
hold off;
end
部分理论来源于网络,如有侵权请联系删除。